File containing funtions to implement kalman filter on femur. More...
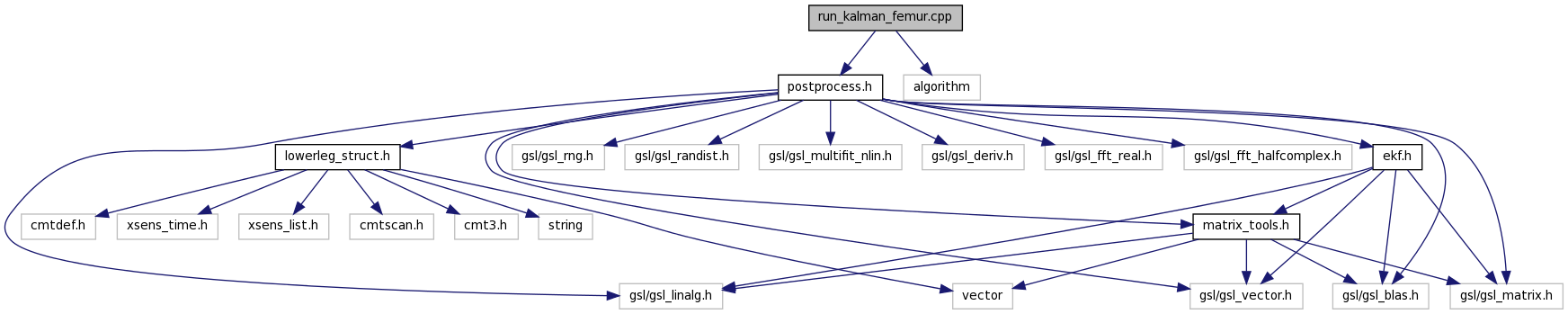
 Include dependency graph for run_kalman_femur.cpp:
Include dependency graph for run_kalman_femur.cpp:Functions | |
| int | run_kalman_femur (femur &fem, vector< vector< double > > wire_A_points, gsl_vector *tot_wire_len, vector< vector< double > > &state, vector< double > thetas) |
| Run the EKF on the femur. | |
File containing funtions to implement kalman filter on femur.
| int run_kalman_femur | ( | femur & | fem, |
| vector< vector< double > > | wire_A_points, | ||
| gsl_vector * | tot_wire_len, | ||
| vector< vector< double > > & | state, | ||
| vector< double > | thetas | ||
| ) |
Run the EKF on the femur.
| [in] | fem | The femur structure with all data |
| [in] | wire_A_points | Base points of the active and passive wires connected to femur. (stored in the order as represented by the jacob equations) ie leftmost wire is labeled 1, irrespective of it being active or passive |
| [in] | tot_wire_len | Total wire lengths of the active wires, necessary for calculating measurement vector |
| [out] | state | The state vector, for each iteration. Output of the kalman filter |
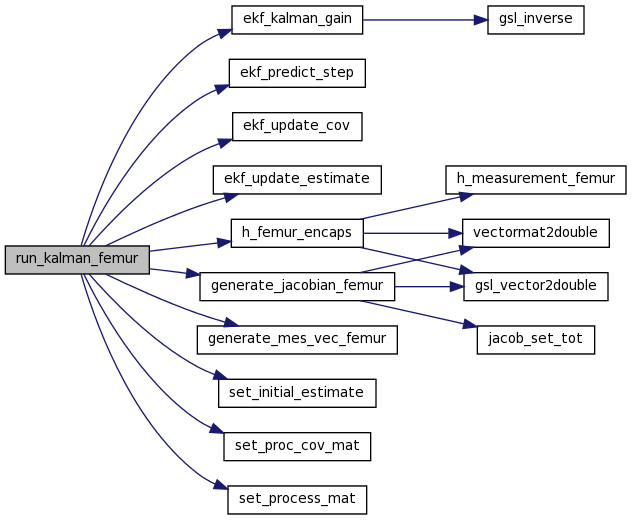
References tibia::accelerometers, tibia::active_wires, ekf_kalman_gain(), ekf_predict_step(), ekf_update_cov(), ekf_update_estimate(), generate_jacobian_femur(), generate_mes_vec_femur(), h_femur_encaps(), sensor::mdata, tibia::opti_count, tibia::optical, sensor::point_flag, set_initial_estimate(), set_proc_cov_mat(), and set_process_mat().
Here is the call graph for this function: 1.7.4
1.7.4