File containing funtions to set initial values for kalman filter on femur. More...
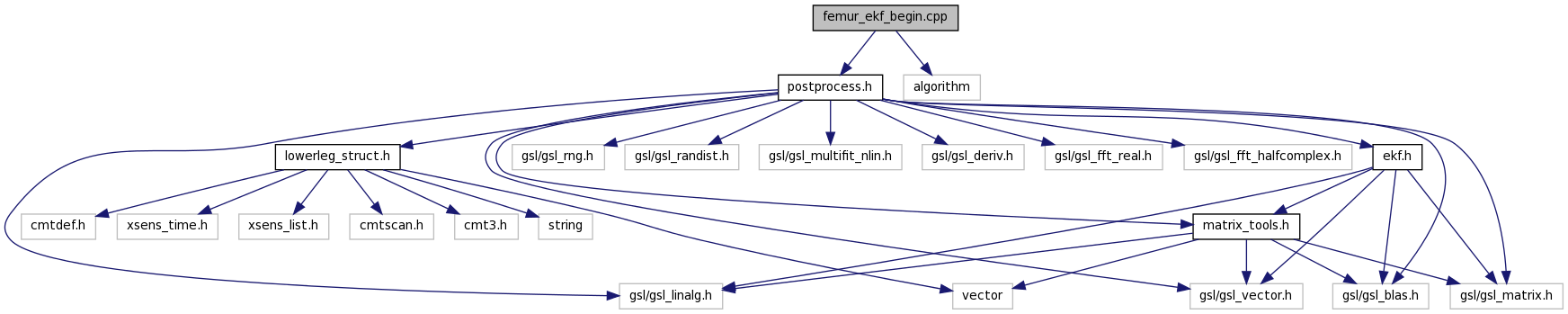
 Include dependency graph for femur_ekf_begin.cpp:
Include dependency graph for femur_ekf_begin.cpp:Functions | |
| int | set_initial_estimate (gsl_vector *state_estimate) |
| int | set_theta_err_cov (gsl_matrix *Q, int num_theta) |
| int | set_process_mat (gsl_matrix *A, double deltaT) |
| int | set_proc_cov_mat (gsl_matrix *Q) |
File containing funtions to set initial values for kalman filter on femur.
| int set_initial_estimate | ( | gsl_vector * | state_estimate | ) |
| int set_proc_cov_mat | ( | gsl_matrix * | Q | ) |
| int set_process_mat | ( | gsl_matrix * | A, |
| double | deltaT | ||
| ) |
| int set_theta_err_cov | ( | gsl_matrix * | Q, |
| int | num_theta | ||
| ) |
 1.7.4
1.7.4