File to generate Jacobian matrix and measurement vector for EKF (for femur) More...
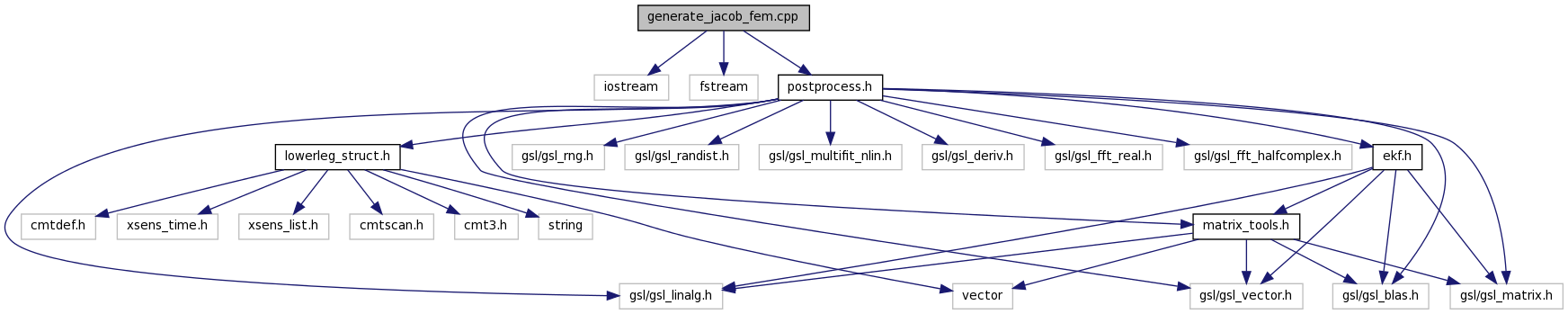
 Include dependency graph for generate_jacob_fem.cpp:
Include dependency graph for generate_jacob_fem.cpp:Functions | |
| int | generate_jacobian_femur (gsl_matrix *J, gsl_vector *state_vec, vector< vector< double > > wire_a_points, vector< double > thetas, vector< double > q) |
| Generate Jacobian for current state for motion of femur collar. | |
| int | generate_mes_vec_femur (gsl_vector *mes_vector, femur &fem, int frame_count, int &wire_frame_count, gsl_vector *tot_wire_len, vector< double > &q) |
| Generate measurement vector for the measurement equation of the EKF. | |
| int | h_measurement_femur (gsl_vector *h, double *sa, double *sddot, double *qa, double theta1, double theta2, double theta3, double theta4, double theta5, double *a1, double *a2, double *a3, double *a4, double *a5, double *a6) |
| Generate measurement vector for specific case, using elements of state vector. | |
| int | h_femur_encaps (gsl_vector *h, gsl_vector *state_vec, vector< vector< double > > wire_a_points, vector< double > thetas, vector< double > q) |
| Generate predicted measurement vector using state-vector (encapsulator for h_measurement_femur()) | |
| int | jacob_set_tot (gsl_matrix *H, double sa[3], double sddot[3], double qa[4], double theta1, double theta2, double theta3, double theta4, double theta5, double *a1, double *a2, double *a3, double *a4, double *a5, double *a6) |
| Generate measurement jacobian. | |
File to generate Jacobian matrix and measurement vector for EKF (for femur)
| int generate_jacobian_femur | ( | gsl_matrix * | J, |
| gsl_vector * | state_vec, | ||
| vector< vector< double > > | wire_a_points, | ||
| vector< double > | thetas, | ||
| vector< double > | q | ||
| ) |
Generate Jacobian for current state for motion of femur collar.
We assume that the configuration is that with 6 plates for the femur, sensor locations given as that for readings done on aug 23, 2011. The calcuations are explained in a pdf explaining EKF, and obtained from the maple file jacob_femur_sensor.maple in the postprocess directory
All sensors need to have their data loaded into femur structure before running this function
| [out] | J | 34x18 jacobian matrix for function relating the state of the system to the measurement vector |
| [in] | state_vec | 18x1 state vector containing [s, s_dot, s_ddot, q, theta1,..., theta5] |
| [in] | fem | Femur structure containing all config data and measurements |
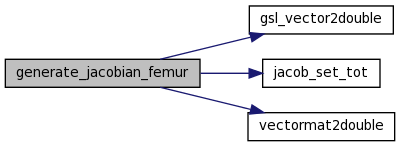
References gsl_vector2double(), jacob_set_tot(), and vectormat2double().
Referenced by run_kalman_femur().
Here is the call graph for this function: Here is the caller graph for this function:| int generate_mes_vec_femur | ( | gsl_vector * | mes_vector, |
| femur & | fem, | ||
| int | frame_count, | ||
| int & | wire_frame_count, | ||
| gsl_vector * | tot_wire_len, | ||
| vector< double > & | q | ||
| ) |
Generate measurement vector for the measurement equation of the EKF.
| [out] | mes_vector | The 34x1 vector denoting output/measurement vector (size of vector already defined, hence we can make this function generic) |
| [in] | fem | Femur structure containing all config data and measurements |
| [in] | frame_count | Index to identify the time step/frame number for calculation |
| [in] | tot_wire_len | active wire calibs. i.e total wire length. |
acceleration in local frame expressed as quaternion for multiplication
acceleration in global frame expressed as quaternion for multiplication
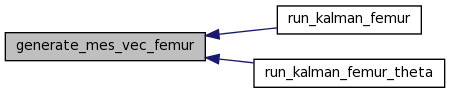
References tibia::accelerometers, tibia::accl_count, tibia::act_wire_count, tibia::active_wires, sensor::label_id, sensor::mdata, sensor::nb_pulley, tibia::opti_count, tibia::optical, tibia::pass_wire_count, and tibia::passive_wires.
Referenced by run_kalman_femur(), and run_kalman_femur_theta().
Here is the caller graph for this function:| int h_femur_encaps | ( | gsl_vector * | h, |
| gsl_vector * | state_vec, | ||
| vector< vector< double > > | wire_a_points, | ||
| vector< double > | thetas, | ||
| vector< double > | q | ||
| ) |
Generate predicted measurement vector using state-vector (encapsulator for h_measurement_femur())
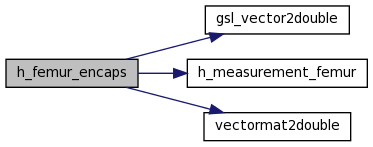
References gsl_vector2double(), h_measurement_femur(), and vectormat2double().
Referenced by run_kalman_femur().
Here is the call graph for this function: Here is the caller graph for this function:| int h_measurement_femur | ( | gsl_vector * | h, |
| double * | sa, | ||
| double * | sddot, | ||
| double * | qa, | ||
| double | theta1, | ||
| double | theta2, | ||
| double | theta3, | ||
| double | theta4, | ||
| double | theta5, | ||
| double * | a1, | ||
| double * | a2, | ||
| double * | a3, | ||
| double * | a4, | ||
| double * | a5, | ||
| double * | a6 | ||
| ) |
Generate measurement vector for specific case, using elements of state vector.
Referenced by h_femur_encaps().
Here is the caller graph for this function:| int jacob_set_tot | ( | gsl_matrix * | H, |
| double | sa[3], | ||
| double | sddot[3], | ||
| double | qa[4], | ||
| double | theta1, | ||
| double | theta2, | ||
| double | theta3, | ||
| double | theta4, | ||
| double | theta5, | ||
| double * | a1, | ||
| double * | a2, | ||
| double * | a3, | ||
| double * | a4, | ||
| double * | a5, | ||
| double * | a6 | ||
| ) |
Generate measurement jacobian.
The quaternion is expressed as Rodrigues parameters to prevent problems of solutions with quaternion magnitude different from 1
Referenced by generate_jacobian_femur().
Here is the caller graph for this function: 1.7.4
1.7.4