Nous avons vu qu'en terme de déplacement horizontal un CDPR à 3
câbles ne
pouvait pas se déplacer en dehors du triangle ![]() , ce qui
ne permet pas, par exemple, de couvrir une pièce rectangulaire. Pour
élargir
l'ensemble des positions que
, ce qui
ne permet pas, par exemple, de couvrir une pièce rectangulaire. Pour
élargir
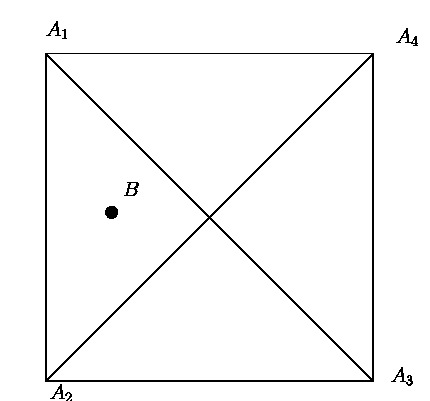
l'ensemble des positions que ![]() peut atteindre il suffit de rajouter
un quatrième câble et de mettre les mâts aux 4 coins de la
pièce. Pour les
mêmes raisons que pour le CDPR à 3 câbles le point
peut atteindre il suffit de rajouter
un quatrième câble et de mettre les mâts aux 4 coins de la
pièce. Pour les
mêmes raisons que pour le CDPR à 3 câbles le point ![]() du CDPR
à 4 câbles vu de dessus pourra se
déplacer à l'intérieur du quadrilatère
du CDPR
à 4 câbles vu de dessus pourra se
déplacer à l'intérieur du quadrilatère ![]() . En
hauteur ses limites sont de la même nature que pour les les CDPR à
3 câbles.
. En
hauteur ses limites sont de la même nature que pour les les CDPR à
3 câbles.
Outre l'augmentation de l'espace de travail
dans lequel ![]() peut se déplacer
on pourrait
penser que l'on va aussi réduire les tensions dans les câbles
(comparées à un CDPR à 3 câbles)
puisque nous avons 4 câbles pour soutenir la charge.
Mais est t'il possible de placer
peut se déplacer
on pourrait
penser que l'on va aussi réduire les tensions dans les câbles
(comparées à un CDPR à 3 câbles)
puisque nous avons 4 câbles pour soutenir la charge.
Mais est t'il possible de placer ![]() dans une position avec 4
câbles tendus puis de le déplacer tout en maintenant les
4 câbles tendus ? Supposons que
dans une position avec 4
câbles tendus puis de le déplacer tout en maintenant les
4 câbles tendus ? Supposons que ![]() soit dans une position
avec 3 câbles tendus (par exemple les
câbles 1,2,3) et le 4ème détendu. Nous avons vu
qu'avec 3 câbles tendus la position de
soit dans une position
avec 3 câbles tendus (par exemple les
câbles 1,2,3) et le 4ème détendu. Nous avons vu
qu'avec 3 câbles tendus la position de ![]() est totalement
déterminée par
la longueur des câbles. La distance de
est totalement
déterminée par
la longueur des câbles. La distance de ![]() à
à ![]() , qui est la
longueur du 4ème câble, est donc totalement déterminée.
Pour tendre le
4ème câble nous devons donc être capable
d'ajuster de manière infiniment précise
sa longueur. En effet si elle trop grande le câble restera détendu
et
si elle
est trop courte, alors le point
, qui est la
longueur du 4ème câble, est donc totalement déterminée.
Pour tendre le
4ème câble nous devons donc être capable
d'ajuster de manière infiniment précise
sa longueur. En effet si elle trop grande le câble restera détendu
et
si elle
est trop courte, alors le point ![]() ne peut pas rester dans cette
position et va donc évoluer vers un autre position. Cette autre
position ne peut pas être une position avec les 4 câbles tendus
puisque dans ce cas la position serait celle où 1,2,3 sont tendus.
ne peut pas rester dans cette
position et va donc évoluer vers un autre position. Cette autre
position ne peut pas être une position avec les 4 câbles tendus
puisque dans ce cas la position serait celle où 1,2,3 sont tendus.
Contrôler très précisément la longueur d'un câble est physiquement impossible (nous avons même déjà vu que la mesurer exactement n'est pas possible). Dans ces conditions le mieux que nous puissions dire est que lorsque l'on raccourcira le 4ème câble le CDPR passera, à un instant inconnu, dans une configuration où les 4 câbles seront tendus avant d'évoluer vers une configuration où, au plus, 3 câble seront tendus.
Un CDPR a 4 câbles aura en général au plus 3 câbles tendus mais pourra passer par instant dans un configuration où tous les câbles seront tendus. Si l'on ne dispose comme information que la mesure des longueurs des câbles il est par contre impossible de le placer par commande dans une position où tous les câbles sont tendus et de maintenir tous les câbles tendus pendant que le CDPR se déplace.
On peut se poser la question de l'importance du résultat de la section précédente mais nous allons voir qu'il va avoir une influence majeure sur le fonctionnement du système.
Pour un CDPR à 4 câbles Pour mettre ![]() dans une position donnée
le principe est le même
que pour le CDPR à 3 câbles: on calcule les longueurs de câbles
pour la position et on demande au système de commande d'appliquer
ces longueurs, sachant que les longueurs réelles des câbles ne
seront pas exactement celle requises pour atteindre la position objectif.
dans une position donnée
le principe est le même
que pour le CDPR à 3 câbles: on calcule les longueurs de câbles
pour la position et on demande au système de commande d'appliquer
ces longueurs, sachant que les longueurs réelles des câbles ne
seront pas exactement celle requises pour atteindre la position objectif.
Au vu la section ci-dessus, vous savez
qu'il y a une forte probabilité pour que le CDPR ait au plus 3
câbles tendus. Mais lesquels ? Pour déterminer cela il faut
regarder
dans quel triangle ![]() est contenu le point
est contenu le point ![]() puisque cela
définit les poses atteignables du point de vue de
l'équilibre mécanique. Regardons l'exemple de la
figure 15.
puisque cela
définit les poses atteignables du point de vue de
l'équilibre mécanique. Regardons l'exemple de la
figure 15.
Deux types de stratégies sont possibles:
configuration 123 f: 0.609303 0.764853 0.257391
configuration 124 f: 0.406202 0.892328 0.302076
configuration 134 f: 1.827909 1.801735 -1.812457
configuration 234 f: 1.147279 -0.514782 0.906228
On voit bien que le système est en équilibre avec des câbles
tendus (donc les ![]() tous positifs) pour 2 configurations: 123 et 124.
On voit cependant que dans la configuration 124 le câble ayant la
tension maximum a une tension 16%
plus élevée que l'équivalent
dans la configuration 123.
tous positifs) pour 2 configurations: 123 et 124.
On voit cependant que dans la configuration 124 le câble ayant la
tension maximum a une tension 16%
plus élevée que l'équivalent
dans la configuration 123.
Le calcul a été fait ici en supposant que les longueurs des
câbles étaient la longueur exacte des câbles. Supposons
maintenant qu'il y ait respectivement des erreurs de 2cm, -1.5cm, 1cm,
-1.5cm sur les câbles 1, 2, 3, 4.
En utilisant ces estimations on peut calculer la position de ![]() pour
les configurations 123 et 124. On obtient (-2.017932 -1.023914
1.996872) et (-1.965610 -1.023914 2.010192). On voit donc qu'il y aura
une différence sensible dans l'estimation de la position de
pour
les configurations 123 et 124. On obtient (-2.017932 -1.023914
1.996872) et (-1.965610 -1.023914 2.010192). On voit donc qu'il y aura
une différence sensible dans l'estimation de la position de ![]() selon la configuration choisie pour le calcul.
selon la configuration choisie pour le calcul.
Idéalement on aimerait que les câbles qui ne participent pas à
l'équilibre mécanique du CDPR aient une longueur proche de leur
longueur tendue. Ceci en particulier éviterait des changements
abrupts de la position de ![]() lors des changements de
configuration. A ce stade du mode opératoire notre information
dérive de l'évaluation des longueurs des câbles obtenues via les
codeurs. A partir de cette information on dérive la position de
lors des changements de
configuration. A ce stade du mode opératoire notre information
dérive de l'évaluation des longueurs des câbles obtenues via les
codeurs. A partir de cette information on dérive la position de
![]() mais nous avons déjà vu que selon les câbles qui sont
utilisés pour cette dérivation
on obtiendra des positions différentes pour
mais nous avons déjà vu que selon les câbles qui sont
utilisés pour cette dérivation
on obtiendra des positions différentes pour ![]() . Avec cette
stratégie il est impossible de déterminer quels
sont les câbles qui ne sont pas tendus avec la seule information
(inexacte) de la longueur des câbles.
. Avec cette
stratégie il est impossible de déterminer quels
sont les câbles qui ne sont pas tendus avec la seule information
(inexacte) de la longueur des câbles.
Intuitivement on pourrait penser que si l'on mesurait la tension dans les câbles, c'est-à-dire la force que le câble exerce sur la charge, on pourrait savoir quels câbles sont tendus. Malheureusement la pratique a montré que cette mesure est délicate et très bruitée (la mesure ne reflète que mal la vraie valeur de la tension).
Heureusement la mesure des tensions n'est pas la seule solution pour détecter les câbles non tendus et les sections suivantes vont proposer différentes approches pour améliorer le fonctionnement d'un CDPR. Les diverses solutions proposées sont encore du domaine de la recherche (même si elles ont été testées sur nos prototypes MARIONET) et leur compréhension peut, dans certains cas, nécessiter une bonne compétence scientifique. Le lecteur plus intéressé dans la réalisation d'un CDPR de démonstration ou pédagogique pourra, pour une première lecture, passer directement à la section 10.