A ce stade on a décrit le principe d'un CDPR et on a une idée des technologies qui permettent leur réalisation physique. Il faut mettre maintenant en oeuvre le système pour qu'il devienne fonctionnel c'est-à-dire répondre à des besoins comme comment le CDPR peut aller à une position, quelles sont les positions qu'il peut atteindre ...
On se focalise dans cette section sur les CDPRs à 3 câbles mais la plupart des considérations mentionnées ici s'appliquent au CDPR avec 2 câbles.
Pour cela on va supposer que l'on a construit le CDPR
dont les câbles sont
idéaux. Les câbles sortent du haut des mâts par des points
fixes
![]() et sont attachés à la charge au même point
et sont attachés à la charge au même point
![]() . Construire le CDPR revient à placer les points
. Construire le CDPR revient à placer les points ![]() dans une
position fixe dans l'espace (par exemple dans les coins d'une
pièce).
dans une
position fixe dans l'espace (par exemple dans les coins d'une
pièce).
Évidemment un premier point d'intérêt est de pouvoir placer la
charge dans un endroit donné. Il va falloir trouver un moyen de
décrire cet endroit. Pour cela on va utiliser une méthode simple
pour définir un endroit dans une pièce rectangulaire donnée. On
choisit tout d'abord un point particulier ![]() qui sera le point au sol
à l'intersection de 2 murs appelés mur 1 et 2. Pour définir un
point de la pièce on va utiliser trois valeurs: la hauteur du point
par rapport au sol et les distances du point au mur 1 et 2. Demander
à un CDPR de mettre
qui sera le point au sol
à l'intersection de 2 murs appelés mur 1 et 2. Pour définir un
point de la pièce on va utiliser trois valeurs: la hauteur du point
par rapport au sol et les distances du point au mur 1 et 2. Demander
à un CDPR de mettre ![]() en un point va consister à fournir à la
commande les trois valeurs du point mais il va falloir que la commande
traduise cette demande en longueurs de câbles puisque c'est la seule
chose qu'elle sait faire.
en un point va consister à fournir à la
commande les trois valeurs du point mais il va falloir que la commande
traduise cette demande en longueurs de câbles puisque c'est la seule
chose qu'elle sait faire.
Nous avons déjà vu dans l'exemple
des grues que la position
de la charge dépendait de la longueur des câbles, c'est-à-dire
de la distance entre les points ![]() et
et ![]() .
.
Une première constatation s'impose: si vous voulez atteindre un point
donné, alors les longueurs des câbles vont être fixées.
Cela tient à un fait simple: les longueurs des câbles sont
simplement les distances entre le point ![]() et les 3
et les 3 ![]() . Comme tous
ces points sont fixés dans l'espace alors leurs distances sont elles
aussi fixées.
Sans entrer dans les détails on peut calculer
mathématiquement qu'elle doit être la longueur des câbles pour
que le CDPR aille dans une position donnée. Ce sont ces valeurs qui
seront calculées par la commande qui demandera ensuite aux moteurs
de tourner pour que les longueurs de câbles soient celles
désirées.
. Comme tous
ces points sont fixés dans l'espace alors leurs distances sont elles
aussi fixées.
Sans entrer dans les détails on peut calculer
mathématiquement qu'elle doit être la longueur des câbles pour
que le CDPR aille dans une position donnée. Ce sont ces valeurs qui
seront calculées par la commande qui demandera ensuite aux moteurs
de tourner pour que les longueurs de câbles soient celles
désirées.
Dans un monde idéal la commande va réaliser parfaitement les longueurs souhaités et le CDPR ira exactement à l'endroit désiré. Dans le monde réel les choses sont un peu plus compliqué et nous en parlerons dans la section 5.3. Mais avant d'en parler nous allons faire une première incursion dans le monde réel.
Le CDPR a trois câbles a été présenté vu de dessus dans
la figure 5 avec les longueurs des câbles dénotés
![]() . Comme on le voit sur la figure on a définit un
repère de référence
. Comme on le voit sur la figure on a définit un
repère de référence
![]() et dire que l'on
connaît les dimensions du robot revient à dire que les
coordonnées (
et dire que l'on
connaît les dimensions du robot revient à dire que les
coordonnées (
![]() ) des
) des ![]() dans ce repère sont
connues. Savoir on l'on veut aller veut dire que l'on connaît les
coordonnées
dans ce repère sont
connues. Savoir on l'on veut aller veut dire que l'on connaît les
coordonnées ![]() de
de ![]() sont connues. Si l'on écrit que la
longueur
sont connues. Si l'on écrit que la
longueur ![]() du câble
du câble ![]() est la distance entre
est la distance entre ![]() et
et ![]() on
obtient l'équation
on
obtient l'équation
Pour illustrer numériquement certaines propriétés des CDPR à 3
câbles nous allons utiliser dans toute la suite un exemple
générique
en choisissant
![]() ,
,
![]() ,
,
![]() . Pour le
CDPR générique on suppose que la charge est telle qu'elle exerce
une force purement verticale de 1 Newton.
. Pour le
CDPR générique on suppose que la charge est telle qu'elle exerce
une force purement verticale de 1 Newton.
Pour la position de ![]() (-2,-1,3.5) les
(-2,-1,3.5) les ![]() ont comme valeurs 3.57,
1.658, 4.77.
ont comme valeurs 3.57,
1.658, 4.77.
Le calcul de la longueur des câbles pour atteindre
une position ![]() nécessite la connaissance de la position des points
nécessite la connaissance de la position des points
![]() qui est donc une étape préalable
à l'utilisation d'un CDPR et qu'on
appelle la calibration du CDPR.
qui est donc une étape préalable
à l'utilisation d'un CDPR et qu'on
appelle la calibration du CDPR.
L'estimation de la géométrie d'un
CDPR n'est pas forcément une tâche facile en particulier dès que
l'on a à faire à un CDPR de bonne taille: les points ![]() ne sont
peut être pas accessible facilement et/ou leurs distances à des murs
de référence difficile à mesurer.
ne sont
peut être pas accessible facilement et/ou leurs distances à des murs
de référence difficile à mesurer.
Une manière simple de réaliser cette opération est de mesurer
(par exemple avec un mètre à ruban ou un télémètre laser)
les distances entre les paires de point ![]() ainsi que les hauteurs
de ces points. Une opération
mathématique un peu complexe permet d'en déduire la position des
points
ainsi que les hauteurs
de ces points. Une opération
mathématique un peu complexe permet d'en déduire la position des
points ![]() avec une précision qui dépendra de la qualité des
mesures des distances.
avec une précision qui dépendra de la qualité des
mesures des distances.

La calibration ne va pas s'arrêter là. On a vu dans la section 4.5 que l'on ne sait que mesurer la variation de longueur de câble par rapport à une valeur initiale. Lorsque l'on démarre le système il faudra donc mesurer la longueur initiale des câbles pour être capable de déterminer la longueur des câbles lors des mouvements du CDPR. A noter que l'on peut réaliser cette opération aussi après le démarrage du système: il suffit pour cela de mesurer la longueur courante, dite longueur initiale, du câble et d'obtenir la mesure du codeur, appelée mesure initiale. Par la suite la différence entre la mesure codeur et la mesure initiale permet de calculer le changement de longueur par rapport à la longueur initiale, donc la longueur courante.
Cette opération manuelle est fastidieuse et nous verrons plus loin comment procéder pour la rendre automatique.
Il faut être conscient des limites de la commande qui a comme objectif de mettre les câbles à une longueur donnée. Tout d'abord en raison des frottements et des jeux mécaniques il y a une limite sur le plus petit déplacement que le tambour peut effectuer. Par conséquent il y a une limite sur la variation de longueur du câble en dessous de laquelle on ne peut pas descendre: cette limite s'appelle la résolution de la commande des longueurs. A son tour cette résolution va faire qu'il sera impossible de déplacer la charge d'un point à un autre sur une distance inférieure à une limite que l'on appelle la résolution du CDPR. Sans entrer dans les détails la résolution du CDPR n'est pas constante car elle dépend de la position de la charge d'où l'on part. En pratique on l'estime expérimentalement en s'appuyant sur une analyse théorique qui en fournit une valeur approchée. La commande arrêtera le CDPR si la distance entre la position courante de la charge et celle désirée est proche de la résolution du CDPR puisque c'est le mieux qu'elle puisse faire.
La résolution n'est pas la seule chose qui empêche le CDPR
d'atteindre exactement la position voulue.
Nous avons déjà vu que l'on ne connaît pas exactement la
position des ![]() et qu'il y a des erreurs
sur la
mesure des longueurs des câbles. En résumé
pour atteindre une position de la charge donnée
la commande va se tromper sur la longueur des câbles et même cette
longueur ne sera pas atteinte exactement.
Le CDPR n'est donc pas parfait et n'atteindra
pas exactement une position désirée.
On définit la précision du CDPR comme la distance
entre une position de la charge désirée et celle
qui est atteinte après utilisation de la
commande.
et qu'il y a des erreurs
sur la
mesure des longueurs des câbles. En résumé
pour atteindre une position de la charge donnée
la commande va se tromper sur la longueur des câbles et même cette
longueur ne sera pas atteinte exactement.
Le CDPR n'est donc pas parfait et n'atteindra
pas exactement une position désirée.
On définit la précision du CDPR comme la distance
entre une position de la charge désirée et celle
qui est atteinte après utilisation de la
commande.
Une autre conséquence est que si l'on part d'une position de la charge pour atteindre une autre position puis que l'on demande au CDPR de revenir à la position initiale il n'y reviendra pas exactement. La distance entre la position initiale et la position finale est appelée la répétabilité du CDPR.
Comme la résolution la répétabilité et la précision dépend
de la position de ![]() . Prenons un exemple simple en supposant
en supposant que la résolution sur les longueurs des câbles soit
de 2cm et que chaque câble doit être de 100cm pour atteindre la
position désirée.
La longueur réelle des câbles sera donc entre
entre 98cm et 102cm. Supposons aussi que l'on ait mesuré la position
des
. Prenons un exemple simple en supposant
en supposant que la résolution sur les longueurs des câbles soit
de 2cm et que chaque câble doit être de 100cm pour atteindre la
position désirée.
La longueur réelle des câbles sera donc entre
entre 98cm et 102cm. Supposons aussi que l'on ait mesuré la position
des ![]() avec une précision de 1cm. Avec ces données
un calcul relativement complexe
permet de calculer quelle sera la distance maximum entre la position
voulue et la position atteinte, ce qui donne une idée de la
précision du CDPR.
En
pratique la précision mesurée
aura une valeur qui sera en général
meilleure que la précision calculée car celle-ci est la
précision dans le pire des cas où toutes les erreurs s'accumulent
pour éloigner la charge de la position désirée.
avec une précision de 1cm. Avec ces données
un calcul relativement complexe
permet de calculer quelle sera la distance maximum entre la position
voulue et la position atteinte, ce qui donne une idée de la
précision du CDPR.
En
pratique la précision mesurée
aura une valeur qui sera en général
meilleure que la précision calculée car celle-ci est la
précision dans le pire des cas où toutes les erreurs s'accumulent
pour éloigner la charge de la position désirée.
Toutefois les CDPR ont une propriété commune avec tous les robots parallèles qui est que toutes les erreurs mentionnées ont tendance à se moyenner en à l'inverse des structures séries où elles ont plutôt tendance à s'additionner. Ramener à une taille identique en terme de position que l'on peut atteindre les CDPR auront donc en général une précision meilleure que les robots série.
La vidéo ci-après montre comment la précision varie lorsque le CDPR monte d'une hauteur de 0.5 mètres à une hauteur de 3.8 mètres, la hauteur des mâts étant de 4 mètres et que l'on a une erreur maximale de 2cm sur la longueur des câbles. La charge est représentée par le rectangle bleu qui monte, l'échelle à gauche donne la hauteur de la charge. Les courbe à droite de la charge représentent la distance maximale en centimètre entre la position objectif et celle réellement atteinte selon chacun des axes de déplacement (en rouge selon avant/arrière, en bleu gauche/droite et en noir montée/descente). On voit par exemple que plus l'on monte plus l'erreur sur la hauteur augmente alors que les erreurs sur gauche/droite, avant/arrière diminuent graduellement.
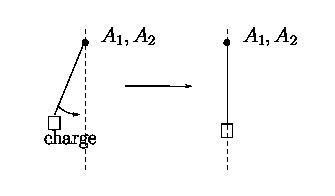
Une caractéristique des câbles est qu'ils peuvent tirer la charge mais pas la pousser. Repensons aussi à notre grue à 2 câbles: si l'on modifie la longueur des câbles la charge
aura un mouvement dans l'espace et lorsque les câbles ne changeront plus de longueur elle se stabilisera en étant dans le plan vertical qui contiendra les 2 câbles (figure 12),
|
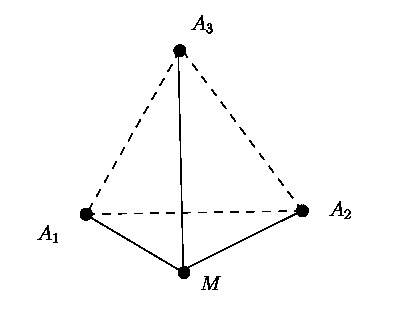
Regardons maintenant ce qui se passe vue de dessus pour un CDPR à
trois câbles. La question est: peut t'on faire atteindre la position
![]() à la charge (on suppose que la longueur maximale des câbles le
permet), figure 13 ?
à la charge (on suppose que la longueur maximale des câbles le
permet), figure 13 ?
|
La réponse est non: nous venons de voir que la charge
tenue par les câbles 1 et 2 revient spontanément dans le plan
vertical contenant ![]() . Pour empêcher ce mouvement il faudrait
donc que le câble 3 pousse la charge vers l'extérieur du
triangle
. Pour empêcher ce mouvement il faudrait
donc que le câble 3 pousse la charge vers l'extérieur du
triangle ![]() , ce qu'un câble ne peut pas faire. La
réponse serait la même si l'on plaçait
, ce qu'un câble ne peut pas faire. La
réponse serait la même si l'on plaçait
![]() au delà de
l'arête
au delà de
l'arête
![]() (le
câble 1 devrait pousser) ou
au delà de l'arête
(le
câble 1 devrait pousser) ou
au delà de l'arête ![]() (le câble 2 devrait pousser).
(le câble 2 devrait pousser).
La conclusion est donc que le point représentant la charge vue
de dessus ne
peut être placé qu'à l'intérieur du triangle ![]() .
.
Qu'en est t'il pour la hauteur de la charge ? il est clair que le
point ![]() ne peut pas descendre plus bas que la longueur maximale que le câble
peut atteindre. Pour faire simple on va supposer que points
ne peut pas descendre plus bas que la longueur maximale que le câble
peut atteindre. Pour faire simple on va supposer que points ![]() sont tous à la même hauteur. Il n'est pas possible de mettre le
point
sont tous à la même hauteur. Il n'est pas possible de mettre le
point ![]() au dessus des points
au dessus des points ![]() puisque cela voudrait dire que
les câbles poussent la charge vers le haut. Supposons que la
charge soit maintenant sous les points
puisque cela voudrait dire que
les câbles poussent la charge vers le haut. Supposons que la
charge soit maintenant sous les points ![]() et faites l'expérience
suivante: prenez 2 poulies que vous fixez sur une table, une masse
auquelle vous accrochez 2 câbles en passant l'autre extrémité du
câble dans un des 2 poulies. Maintenant tirez les câbles après
les poulies pour faire monter la charge. Vous allez vous rendre compte
que plus la charge monte plus il va vous falloir tirer fort sur les
câbles et que si vous allez jusqu'au bout de l'expérience
qu'à un moment donné un câble
va casser. Ce qui va donc limiter la montée de la charge est le
point de rupture des câbles. Le même phénomène se produirait
avec un CDPR à 3 câbles. Un CDPR ne peut donc mettre la charge que
dans un volume limité de l'espace: c'est ce que l'on appelle son
espace de travail.
et faites l'expérience
suivante: prenez 2 poulies que vous fixez sur une table, une masse
auquelle vous accrochez 2 câbles en passant l'autre extrémité du
câble dans un des 2 poulies. Maintenant tirez les câbles après
les poulies pour faire monter la charge. Vous allez vous rendre compte
que plus la charge monte plus il va vous falloir tirer fort sur les
câbles et que si vous allez jusqu'au bout de l'expérience
qu'à un moment donné un câble
va casser. Ce qui va donc limiter la montée de la charge est le
point de rupture des câbles. Le même phénomène se produirait
avec un CDPR à 3 câbles. Un CDPR ne peut donc mettre la charge que
dans un volume limité de l'espace: c'est ce que l'on appelle son
espace de travail.
La vidéo ci dessous montre comment évoluent les forces dans les câbles quand la charge (en bleu) monte (le haut des mâts est à une hauteur de 4 mètres)
Maintenant si on a des mâts suffisamment hauts et que l'on limite la
hauteur du point ![]() les tensions dans les câbles vont rester
limitées à une fraction de la charge: on obtiendra alors un CDPR
qui pourra manipuler des charges importantes.
Ainsi dans l'exemple de la vidéo, où la charge vaut 1, tant que
les tensions dans les câbles vont rester
limitées à une fraction de la charge: on obtiendra alors un CDPR
qui pourra manipuler des charges importantes.
Ainsi dans l'exemple de la vidéo, où la charge vaut 1, tant que ![]() reste
à une hauteur inférieure à 2 mètres les forces dans les
câbles sont toutes inférieures à 0.8.
Dans notre prototype
d'Ultrabot
MARIONET-CRANE on pouvait monter une charge de 2.5 tonnes à une
hauteur de 15 mètres. Pour MARIONET-ASSIST, destiné au transfert
de personnes âgées, on peut monter 250 kg à 2 mètres.
reste
à une hauteur inférieure à 2 mètres les forces dans les
câbles sont toutes inférieures à 0.8.
Dans notre prototype
d'Ultrabot
MARIONET-CRANE on pouvait monter une charge de 2.5 tonnes à une
hauteur de 15 mètres. Pour MARIONET-ASSIST, destiné au transfert
de personnes âgées, on peut monter 250 kg à 2 mètres.
Si l'on connaît la position de la charge on peut calculer la
matrice ![]() . L'équation ci-dessus
est un système linéaire dans les tensions
. L'équation ci-dessus
est un système linéaire dans les tensions ![]() que l'on
peut donc
calculer. Mais attention le fait que les câbles ne peut que
tirer implique que les
que l'on
peut donc
calculer. Mais attention le fait que les câbles ne peut que
tirer implique que les
![]() doivent être toutes positives ou nulles. Si la résolution du
système
conduit à
au moins un
doivent être toutes positives ou nulles. Si la résolution du
système
conduit à
au moins un ![]() négatif, alors on ne peut pas aller
dans cette position. On peut alors montrer que les
négatif, alors on ne peut pas aller
dans cette position. On peut alors montrer que les ![]() seront toutes
positives uniquement si
seront toutes
positives uniquement si ![]() est à l'intérieur du triangle.
est à l'intérieur du triangle.
Pour le robot générique avec ![]() en (-2,-1,3.5) les tensions
en (-2,-1,3.5) les tensions ![]() sont 2.14, 1.99, 0.953 pour
sont 2.14, 1.99, 0.953 pour ![]() . On voit que dans cette position,
peu éloignée du plan des
. On voit que dans cette position,
peu éloignée du plan des ![]() , les tensions dans les câbles
sont relativement élevées et en particulier certaines sont
supérieures à la charge. Si l'on place
, les tensions dans les câbles
sont relativement élevées et en particulier certaines sont
supérieures à la charge. Si l'on place ![]() en
(-2,-1,0.5) elles deviennent 0.426, 0.658, 0.168: dans ce cas même
si la tension de rupture du câble est à 1 on peut soulever la
charge.
en
(-2,-1,0.5) elles deviennent 0.426, 0.658, 0.168: dans ce cas même
si la tension de rupture du câble est à 1 on peut soulever la
charge.
Prenons l'exemple du CDPR à deux câbles lorsque la charge est
placée au milieu entre les deux treuils et monte verticalement. Dans
ce cas l'angle entre le câble et l'horizontal est le même pour les
deux câbles de valeur ![]() . On peut alors montrer que le
déterminant de
. On peut alors montrer que le
déterminant de ![]() est proportionnel à
est proportionnel à ![]() et s'annule
donc quand
et s'annule
donc quand ![]() est nulle, c'est-à-dire quand les câbles sont
horizontaux. Plus généralement on peut montrer que le déterminant
de
est nulle, c'est-à-dire quand les câbles sont
horizontaux. Plus généralement on peut montrer que le déterminant
de ![]() est nul pour toute position de
est nul pour toute position de ![]() sur l'horizontal entre
les deux treuils: ce sont les singularités du CDPR.
sur l'horizontal entre
les deux treuils: ce sont les singularités du CDPR.
On peut aussi aborder les singularités avec une autre approche. Dans
la section (5.5) on va voir que la vitesse de la charge
est linéairement reliée à la vitesse d'enroulement des
câbles via la
matrice ![]() qui est la matrice transposée de
qui est la matrice transposée de ![]() . On
sait que le déterminant de
. On
sait que le déterminant de ![]() est le même que celui de
est le même que celui de
![]() . Si on est dans une singularité et que l'on impose une
vitesse nulle au câble alors on sait que la solution du système
dans la vitesse de la charge peut ne pas être nulle: la charge peut
bouger alors que les câbles ne changent pas de longueur !
. Si on est dans une singularité et que l'on impose une
vitesse nulle au câble alors on sait que la solution du système
dans la vitesse de la charge peut ne pas être nulle: la charge peut
bouger alors que les câbles ne changent pas de longueur !
Maintenant intéressons nous à la vitesse de notre CDPR sachant que
les treuils imposent une vitesse maximum pour l'enroulement des
câbles. Intuitivement on pourrait penser que la vitesse de montée
de ![]() ne peut pas être supérieure à la vitesse d'enroulement maximum
des câbles mais cette intuition est fausse. Pour vérifier cela
reprenons le montage à deux poulies proposé dans la section
précédente. Mesurez la hauteur actuelle de votre charge puis tirez
d'exactement 1cm les deux câbles: si vous mesurez alors la hauteur de
votre charge vous verrez qu'elle a monté de plus d'un cm. Et plus
haut vous mettez la charge au début plus la variation d'altitude de
la charge va augmenter pour le même centimètre de changement de la
longueur des câbles.
ne peut pas être supérieure à la vitesse d'enroulement maximum
des câbles mais cette intuition est fausse. Pour vérifier cela
reprenons le montage à deux poulies proposé dans la section
précédente. Mesurez la hauteur actuelle de votre charge puis tirez
d'exactement 1cm les deux câbles: si vous mesurez alors la hauteur de
votre charge vous verrez qu'elle a monté de plus d'un cm. Et plus
haut vous mettez la charge au début plus la variation d'altitude de
la charge va augmenter pour le même centimètre de changement de la
longueur des câbles.
Mais qu'en est t'il pour les mouvements horizontaux ? le même
phénomène se produit: la vitesse maximum de ![]() est un multiple de la vitesse maximum des câbles avec un facteur
d'amplification qui sera toujours supérieur à 1. Ainsi pour notre
prototype MARIONET-REHAB dont les câbles peuvent s'enrouler à 100
mètres par seconde la vitesse de
est un multiple de la vitesse maximum des câbles avec un facteur
d'amplification qui sera toujours supérieur à 1. Ainsi pour notre
prototype MARIONET-REHAB dont les câbles peuvent s'enrouler à 100
mètres par seconde la vitesse de ![]() peut atteindre plus de 400
mètres par seconde, ce qui est supérieur à la vitesse du son !
Cette propriété est commune à tous les robots parallèles. Vous
en avez profité sans le savoir en mangeant votre boîte de
chocolat à Pâques car très probablement les chocolats ont été
empaquetés par un robot parallèle à une cadence de 40 chocolats
placés dans les boîtes toutes les 8 à 16 secondes ...
Un CDPR peut donc être très rapide mais il faudra trouver le
bon compromis entre la vitesse et la masse de la charge déplacée.
Il faut aussi voir que cette amplification de vitesse veut aussi dire
que l'erreur sur la longueur des câbles va influer avec la même
amplification sur la position de
peut atteindre plus de 400
mètres par seconde, ce qui est supérieur à la vitesse du son !
Cette propriété est commune à tous les robots parallèles. Vous
en avez profité sans le savoir en mangeant votre boîte de
chocolat à Pâques car très probablement les chocolats ont été
empaquetés par un robot parallèle à une cadence de 40 chocolats
placés dans les boîtes toutes les 8 à 16 secondes ...
Un CDPR peut donc être très rapide mais il faudra trouver le
bon compromis entre la vitesse et la masse de la charge déplacée.
Il faut aussi voir que cette amplification de vitesse veut aussi dire
que l'erreur sur la longueur des câbles va influer avec la même
amplification sur la position de ![]() : plus on ira vite plus il sera
nécessaire d'être précis sur la mesure des longueurs des
câbles pour atteindre une position de
: plus on ira vite plus il sera
nécessaire d'être précis sur la mesure des longueurs des
câbles pour atteindre une position de ![]() raisonnablement proche de
celle désirée.
raisonnablement proche de
celle désirée.
Une remarque importante pour la sécurité du CDPR: en général si la vitesse des câbles est nulle, alors la vitesse de la charge l'est aussi. Or les treuils que nous utilisons sont, en général, tels que si l'alimentation des moteurs des treuils est coupée alors le tambour ne peut plus tourner. Donc en cas de panne de courant le CDPR va rester immobile dans sa position courante, ce qui n'est pas le cas pour les robots série dont les mouvements en cas de panne de courant peuvent être dangereux. Les CDPR présentent donc un bon niveau de sécurité.
Peut t'on savoir où est le point ![]() si l'on connaît la longueur des
câbles ? La réponse est oui mais il va
falloir faire attention à la manière dont on fera le
calcul. Construisez un CDPR à 3 câbles mais en
fixant les longueurs des câbles. Prenez la charge et jetez la
(doucement ...). Au bout d'un certain temps le point
si l'on connaît la longueur des
câbles ? La réponse est oui mais il va
falloir faire attention à la manière dont on fera le
calcul. Construisez un CDPR à 3 câbles mais en
fixant les longueurs des câbles. Prenez la charge et jetez la
(doucement ...). Au bout d'un certain temps le point ![]() va se
stabiliser dans une position fixe. Mais pas forcément dans une
position où les 3 câbles seront tendus. Par exemple si un câble
a une longueur de 20cm et les autres une très grande
longueur il est clair que
la charge va se mettre à l'aplomb du câble le plus court, les 2
autres câbles pendant inutilement (dans le sens où il n'aide pas à
porter la charge). De même si vous avez 2 câbles plutôt courts et
le troisième très long le robot va se comporter comme une grue à
2 câbles et le troisième câble pendra. On peut aussi bien sûr se
retrouver avec les 3 câbles tendus.
va se
stabiliser dans une position fixe. Mais pas forcément dans une
position où les 3 câbles seront tendus. Par exemple si un câble
a une longueur de 20cm et les autres une très grande
longueur il est clair que
la charge va se mettre à l'aplomb du câble le plus court, les 2
autres câbles pendant inutilement (dans le sens où il n'aide pas à
porter la charge). De même si vous avez 2 câbles plutôt courts et
le troisième très long le robot va se comporter comme une grue à
2 câbles et le troisième câble pendra. On peut aussi bien sûr se
retrouver avec les 3 câbles tendus.
La vidéo suivante illustre ce phénomène avec un robot à 4
câbles.
Ici on part d'une situation où l'on a fixé la longueur des 4
câbles et que la position initiale de ![]() est telle que les câbles
sont tous
détendus. On lâche alors la charge et la vidéo montre qu'elle se
stabilise avec uniquement 3 câbles tendus.
est telle que les câbles
sont tous
détendus. On lâche alors la charge et la vidéo montre qu'elle se
stabilise avec uniquement 3 câbles tendus.
La leçon à retenir du paragraphe précédent est que le calcul de
la position de ![]() doit prendre en compte le fait que la solution peut
conduire à une configuration ou un (ou plusieurs) des câbles ont
une longueur qui n'est pas égale à la distance de
doit prendre en compte le fait que la solution peut
conduire à une configuration ou un (ou plusieurs) des câbles ont
une longueur qui n'est pas égale à la distance de ![]() à
à ![]() mais supérieure à celle-ci.
Donc pour calculer la position de
mais supérieure à celle-ci.
Donc pour calculer la position de ![]() à partir des longueurs des
câbles on va procéder comme James Bond sur une route enneigée,
avec prudence. Pour cela on va considérer tous les cas possibles en
terme de câbles tendus ou non.
à partir des longueurs des
câbles on va procéder comme James Bond sur une route enneigée,
avec prudence. Pour cela on va considérer tous les cas possibles en
terme de câbles tendus ou non.
On va commencer en supposant que les 3 câbles sont
tendus. Une opération mathématique simple va alors permettre de
trouver la position de ![]() qui conduit aux bonnes
longueurs de câbles. Mais attention
l'opération peut indiquer qu'il n'y a pas de solution (par exemple si
un câble est très long). Supposons maintenant que cette
opération a déterminé
une solution: est ce la position de
qui conduit aux bonnes
longueurs de câbles. Mais attention
l'opération peut indiquer qu'il n'y a pas de solution (par exemple si
un câble est très long). Supposons maintenant que cette
opération a déterminé
une solution: est ce la position de ![]() ?.
Malheureusement non car nous n'avons considéré le problème que
d'un point de vue de la géométrie alors que nous avons affaire à
un système mécanique qui doit
aussi satisfaire la condition d'équilibre que nous avons présenté
dans la section 5.4. Par exemple si la solution
géométrique est le point
?.
Malheureusement non car nous n'avons considéré le problème que
d'un point de vue de la géométrie alors que nous avons affaire à
un système mécanique qui doit
aussi satisfaire la condition d'équilibre que nous avons présenté
dans la section 5.4. Par exemple si la solution
géométrique est le point ![]() de la figure 13 on sait
qu'elle ne satisfait pas la condition d'équilibre.
Ce n'est qu'après avoir vérifié que la solution géométrique
satisfait aussi la condition d'équilibre que l'on pourra dire que
l'on a effectivement trouvé une position possible pour
de la figure 13 on sait
qu'elle ne satisfait pas la condition d'équilibre.
Ce n'est qu'après avoir vérifié que la solution géométrique
satisfait aussi la condition d'équilibre que l'on pourra dire que
l'on a effectivement trouvé une position possible pour ![]() .
.
Le processus ne s'arrête pas là et on va maintenant
supposer que seulement 2 câbles sont tendus, donc examiner les
où les câbles tendus sont
(1,2),(1,3) et (2,3). Là aussi une
opération mathématique permet de trouver une position possible de
![]() du point de vue de la géométrie. Il faudra donc là aussi
vérifier si la condition d'équilibre est satisfaite. Mais ce n'est
pas suffisant: il faut aussi vérifier la cohérence de notre
hypothèse sur quels câbles sont tendus. Par exemple si l'on a
supposé que les câble tendus étaient 1 et 2, conduisant à une
solution géométrique pour la position de
du point de vue de la géométrie. Il faudra donc là aussi
vérifier si la condition d'équilibre est satisfaite. Mais ce n'est
pas suffisant: il faut aussi vérifier la cohérence de notre
hypothèse sur quels câbles sont tendus. Par exemple si l'on a
supposé que les câble tendus étaient 1 et 2, conduisant à une
solution géométrique pour la position de ![]() il va falloir
vérifier que la distance entre
il va falloir
vérifier que la distance entre ![]() et
et ![]() pour cette position est
bien inférieure à la longueur du câble 3, supposé
détendu. Si ce n'est pas le cas cette solution doit être
rejetée. On examinera finalement le cas où un seul câble serait
tendu, avec les même précaution de vérification concernant la
longueur des câbles supposés non tendus.
pour cette position est
bien inférieure à la longueur du câble 3, supposé
détendu. Si ce n'est pas le cas cette solution doit être
rejetée. On examinera finalement le cas où un seul câble serait
tendu, avec les même précaution de vérification concernant la
longueur des câbles supposés non tendus.
Après ce processus on peut se trouver dans deux cas possibles:
Mais pour résumer dans le cas que nous traitons
la mesure des longueurs des câbles nous
permettra de savoir où se trouve le point ![]() .
.
Par exemple pour le robot générique avec
![]() l'équation en
l'équation en ![]() a comme solution z=6.22, z=1.775
La première met
a comme solution z=6.22, z=1.775
La première met ![]() au dessus des
au dessus des ![]() et peut donc être
éliminée. On trouve alors x=-1.6, y=-0.7.
et peut donc être
éliminée. On trouve alors x=-1.6, y=-0.7.
L'équation en ![]() peut elle ne pas avoir de solution réelle (les
seules qui nous intéresse) ? Cela peut effectivement arriver et par
exemple si
peut elle ne pas avoir de solution réelle (les
seules qui nous intéresse) ? Cela peut effectivement arriver et par
exemple si ![]() cela sera le cas. Si l'on regarde
quand s'annule le discriminant de l'équation en
cela sera le cas. Si l'on regarde
quand s'annule le discriminant de l'équation en ![]() sans fixer de
valeur pour
sans fixer de
valeur pour ![]() on trouvera qu'il est négatif (donc l'équation
n'a pas de solution réelle) si
on trouvera qu'il est négatif (donc l'équation
n'a pas de solution réelle) si
![]() est inférieur à
1.006 ou est supérieur à 6.3235. La première borne dit que la
longueur du câble 2 est trop courte, la 2ème que le câble 2 est
trop long pour que l'équation (5) soit satisfaite. Dans ce
cas on est amené à supposer que le câble 2 est détendu et l'on
résout le problème en supposant que seuls les câbles 1 et 3 sont
tendus.
Par exemple pour
est inférieur à
1.006 ou est supérieur à 6.3235. La première borne dit que la
longueur du câble 2 est trop courte, la 2ème que le câble 2 est
trop long pour que l'équation (5) soit satisfaite. Dans ce
cas on est amené à supposer que le câble 2 est détendu et l'on
résout le problème en supposant que seuls les câbles 1 et 3 sont
tendus.
Par exemple pour ![]() =7 on
trouve y=0.45, x=-0.45 et z=1.244. La distance entre
=7 on
trouve y=0.45, x=-0.45 et z=1.244. La distance entre
![]() et
et ![]() est alors 4.52 et le câble 2 est effectivement
détendu.
est alors 4.52 et le câble 2 est effectivement
détendu.
Déterminer la position de ![]() à partir des longueurs des câbles
revient à établir la relation inverse de ce que nous avons appelé
le modèle géométrique inverse: on appelle cette relation le
modèle géométrique direct.
à partir des longueurs des câbles
revient à établir la relation inverse de ce que nous avons appelé
le modèle géométrique inverse: on appelle cette relation le
modèle géométrique direct.
Jusqu'à maintenant on a supposé que les points de sortie ![]() des
treuils étaient fixes. Cela nous a permis de calculer facilement
qu'elles étaient les longueurs des câbles pour atteindre une
position donnée de
des
treuils étaient fixes. Cela nous a permis de calculer facilement
qu'elles étaient les longueurs des câbles pour atteindre une
position donnée de ![]() .
.
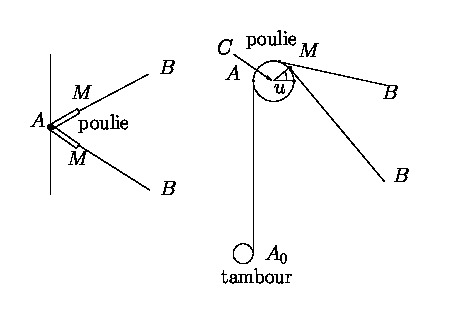
Maintenant si l'on utilise des poulies orientables comme celles
montrées sur la figure 5.7 le point de sortie ![]() ,
c'est-à-dire le point sur la poulie où le câble se dirige vers
,
c'est-à-dire le point sur la poulie où le câble se dirige vers ![]() ,
va bouger (figure 14) parce que d'une part la poulie
tourne autour
de son axe pour s'orienter vers
,
va bouger (figure 14) parce que d'une part la poulie
tourne autour
de son axe pour s'orienter vers ![]() (à gauche sur la figure) mais
aussi car le point
(à gauche sur la figure) mais
aussi car le point ![]() dépend de la proximité de
dépend de la proximité de ![]() avec le mât (à
droite).
avec le mât (à
droite).
|
Jusqu'à présent on avait pu définir la longueur du câble comme
la distance de ![]() à
à ![]() . Maintenant comme
. Maintenant comme ![]() est le point
est le point ![]() ,
qui est variable, on va définir la longueur du câble comme étant
celle entre le point de sortie
,
qui est variable, on va définir la longueur du câble comme étant
celle entre le point de sortie ![]() du câble sur le tambour et le
point
du câble sur le tambour et le
point ![]() . Cette nouvelle définition n'a pas d'influence sur la
mesure des longueurs des câbles reposant sur la mesure de la
rotation du tambour, du moment que la calibration
(voir section 5.2) a pu être réalisée.
Cette nouvelle longueur
. Cette nouvelle définition n'a pas d'influence sur la
mesure des longueurs des câbles reposant sur la mesure de la
rotation du tambour, du moment que la calibration
(voir section 5.2) a pu être réalisée.
Cette nouvelle longueur ![]() se décompose en une partie fixe (la distance entre
se décompose en une partie fixe (la distance entre ![]() et
et ![]() ),
une partie variable (la partie enroulée sur la poulie entre
),
une partie variable (la partie enroulée sur la poulie entre ![]() et
et
![]() ) et la longueur entre
) et la longueur entre ![]() et
et ![]() .
Si l'on ne se soucie pas trop de précision et que le rayon de la
poulie est faible par rapport à
.
Si l'on ne se soucie pas trop de précision et que le rayon de la
poulie est faible par rapport à ![]() on peut négliger l'influence
de la poulie et supposer que le point de sortie est en
on peut négliger l'influence
de la poulie et supposer que le point de sortie est en ![]() . Mais si on
veut améliorer la précision il faut prendre la poulie en
compte. Déterminer la longueur
. Mais si on
veut améliorer la précision il faut prendre la poulie en
compte. Déterminer la longueur ![]() pour atteindre une position
donnée de
pour atteindre une position
donnée de ![]() est un peu complexe mais faisable si l'on suppose le
câble tendu et la poulie parfaite. Une poulie parfaite implique
qu'elle va tourner de façon à ce que les points
est un peu complexe mais faisable si l'on suppose le
câble tendu et la poulie parfaite. Une poulie parfaite implique
qu'elle va tourner de façon à ce que les points ![]() ,
, ![]() et
et ![]() soit dans le même plan vertical: la position de la poulie (et donc
de son centre
soit dans le même plan vertical: la position de la poulie (et donc
de son centre ![]() ) est alors fixée. L'analyse mécanique de la
poulie permet alors de montrer que le point
) est alors fixée. L'analyse mécanique de la
poulie permet alors de montrer que le point ![]() doit être tel que la direction
du câble doit être perpendiculaire à la droite passant par
doit être tel que la direction
du câble doit être perpendiculaire à la droite passant par ![]() et
et ![]() et cette contrainte permet de déterminer
où est
et cette contrainte permet de déterminer
où est ![]() , donc
quelle est la distance entre
, donc
quelle est la distance entre ![]() et
et ![]() . Sur les 3 composantes de la
longueur du câble
on en connaît deux et il ne reste que la longueur entre
. Sur les 3 composantes de la
longueur du câble
on en connaît deux et il ne reste que la longueur entre
![]() et
et ![]() qui est sur la poulie, qui est facilement calculable.
qui est sur la poulie, qui est facilement calculable.
La calibration (section 5.2) du codeur, qui
nécessite la mesure de la longueur initiale du
câble au moment du démarrage du système, est plus délicate
car la mesure de la longueur est rendu difficile par la partie du
câble sur la poulie.
Une possibilité est de détendre tous les câbles sauf un d façon à ce que la charge soit à l'aplomb du point ![]() . Si
. Si ![]() est la
distance entre
est la
distance entre ![]() et
et ![]() et
et ![]() la différence de hauteur entre
la différence de hauteur entre
![]() et
et ![]() alors la longueur
alors la longueur ![]() est
est ![]() où
où ![]() est le
rayon de la poulie.
Une autre approche est de
placer, avant montage du CDPR, une marque sur le câble à une
distance connue de
est le
rayon de la poulie.
Une autre approche est de
placer, avant montage du CDPR, une marque sur le câble à une
distance connue de ![]() . Pour la calibration il suffit alors de placer
manuellement cette marque exactement sur le point de sortie du
tambour et on a alors
la longueur
. Pour la calibration il suffit alors de placer
manuellement cette marque exactement sur le point de sortie du
tambour et on a alors
la longueur ![]() du câble. Ces deux approches ont l'inconvénient
d'être manuelle mais nous verrons que l'on peut exploiter le principe
de la marque pour le rendre automatique (voir section 8.2).
du câble. Ces deux approches ont l'inconvénient
d'être manuelle mais nous verrons que l'on peut exploiter le principe
de la marque pour le rendre automatique (voir section 8.2).
Par contre si l'on dispose de la mesure des longueurs des câbles et
qu'on cherche à déterminer la position de ![]() (ce que l'on a pu
faire pour un CDPR sans poulie) le calcul est très complexe: il n'y
a pas de formule qui permet ce calcul et seul un algorithme sur
ordinateur permet de le résoudre.
(ce que l'on a pu
faire pour un CDPR sans poulie) le calcul est très complexe: il n'y
a pas de formule qui permet ce calcul et seul un algorithme sur
ordinateur permet de le résoudre.
Maintenant regardons le modèle géométrique direct, dans le cas
simple d'un CDPR
à 2 câbles. Il s'agit de déterminer ![]() lorsque
lorsque
![]() sont connus. Nous avons 4 inconnues:
sont connus. Nous avons 4 inconnues:
![]() .
La contrainte de perpendicularité (7) s'écrit pour les
deux câbles:
.
La contrainte de perpendicularité (7) s'écrit pour les
deux câbles:
Dans le type de CDPR que nous étudions nous sommes partis du
principe que les câbles étaient attachés tous au même point
![]() . Dans la pratique il n'est pas possible de réaliser cette
parfaite coïncidence. Une conséquence est que lors du mouvement du
CDPR on peut avoir une rotation de la charge autour de l'axe
vertical. Cette rotation sera cependant d'amplitude faible,
typiquement de l'ordre de
. Dans la pratique il n'est pas possible de réaliser cette
parfaite coïncidence. Une conséquence est que lors du mouvement du
CDPR on peut avoir une rotation de la charge autour de l'axe
vertical. Cette rotation sera cependant d'amplitude faible,
typiquement de l'ordre de ![]() 10 degrés au maximum. Nous verrons
plus loin
qu'il est possible de mesurer cette rotation.
10 degrés au maximum. Nous verrons
plus loin
qu'il est possible de mesurer cette rotation.
La conception d'un CDPR impose d'avoir un espace dégagé au
dessus du
point ![]() , point d'attache des câbles. La charge va donc se trouver
localisée en dessous de
, point d'attache des câbles. La charge va donc se trouver
localisée en dessous de ![]() .
Partant d'une position arrêtée lors d'un mouvement du CDPR
il est inévitable que la charge
oscille. Si le mouvement est régulier cette oscillation va avoir une
amplitude qui diminue progressivement. Par contre si la direction du
mouvement change (typiquement quand
.
Partant d'une position arrêtée lors d'un mouvement du CDPR
il est inévitable que la charge
oscille. Si le mouvement est régulier cette oscillation va avoir une
amplitude qui diminue progressivement. Par contre si la direction du
mouvement change (typiquement quand ![]() part dans la direction
opposée à sa direction précédente) les oscillations vont avoir
une amplitude qui augmente avant, elle aussi, s'atténuer
progressivement.
part dans la direction
opposée à sa direction précédente) les oscillations vont avoir
une amplitude qui augmente avant, elle aussi, s'atténuer
progressivement.
On peut éventuellement amortir ces oscillations à l'aide d'un système qui déplace des masses pour les contrecarrer. Il faut cependant pouvoir les mesurer, point que nous aborderons dans une autre section. Ces oscillations ne sont cependant pas, en général. un problème pour l'utilisation de ce type de CDPR.
La vidéo ci-dessous montre les oscillations de la charge lorsque, partant du CDPR arrêté, il se déplace tout d'abord en arrière jusqu'à atteindre une vitesse de consigne puis au bout de 30 cm prend un virage à 90 degrés pour partir à droite sur 40cm. La vidéo montre une vue en perspective, la vue de dessus puis deux vues de côte et il est préférable de la regarder en plein écran.
Un autre phénomène observable lorsque le CDPR déplace une charge relativement importante est que les câbles vibrent, c'est-à-dire qu'ils bougent perpendiculairement à leur axe, comme des cordes de guitare. Ces vibrations modifient très légèrement la position de la charge mais ont une influence limitée.