Pour le moment le fonctionnement de notre système repose essentiellement sur la mesure de la rotation du tambour par un codeur. Nous avons vu que cela induit des problèmes majeurs:
Dans cette première partie nous allons proposer quelques améliorations, simples à mettre en oeuvre, de l'analyse et du dispositif matériel qui permettent d'améliorer les performances du CDPR.
Pour les treuils simples nous n'avons pour le moment pas détaillé
le mécanisme d'enroulement du câble sur le tambour. Selon la
dimension du tambour on peut déterminer le nombre de spires
jointives que l'on peut enrouler sur une couche. Pour la première
couche une formule simple
permet de déterminer à partir du rayon du tambour et du câble
la longueur d'une spire et par conséquence la
longueur totale du câble
du tambour enroulé sur la couche. On peut répéter le processus
pour les couches suivantes en prenant soin de considérer que le rayon
d'enroulement augmente du diamètre du câble à chaque nouvelle
couche. Si l'on a mesuré la longueur totale du câble on peut donc
calculer pour chaque couche quel sera la distance minimum et maximum
entre ![]() et
et ![]() mais aussi quel sera le rayon d'enroulement. La
calibration initiale fournit la distance entre
mais aussi quel sera le rayon d'enroulement. La
calibration initiale fournit la distance entre ![]() et
et ![]() ce qui
permet de repérer sur quelle couche se trouve le câble donc le
rayon d'enroulement courant. Lors du mouvement d'un tambour on va donc
pouvoir déterminer de combien varie la longueur du câble selon le
changement d'information du codeur et en prenant en compte les
variations
de rayon du tambour. Le suivi de cette longueur permet
aussi de déterminer les moments où le câble change de couche ce
qui permet la mise à jour du rayon d'enroulement.
Ce modèle d'enroulement du câble permet de mieux prendre en compte
les couches et donc améliore l'estimation des longueurs des câbles
à partir des informations codeur. Toutefois il repose sur
l'hypothèse d'un enroulement parfait du câble sur le tambour.
ce qui
permet de repérer sur quelle couche se trouve le câble donc le
rayon d'enroulement courant. Lors du mouvement d'un tambour on va donc
pouvoir déterminer de combien varie la longueur du câble selon le
changement d'information du codeur et en prenant en compte les
variations
de rayon du tambour. Le suivi de cette longueur permet
aussi de déterminer les moments où le câble change de couche ce
qui permet la mise à jour du rayon d'enroulement.
Ce modèle d'enroulement du câble permet de mieux prendre en compte
les couches et donc améliore l'estimation des longueurs des câbles
à partir des informations codeur. Toutefois il repose sur
l'hypothèse d'un enroulement parfait du câble sur le tambour.
La longueur d'une spire d'une hélice de pas ![]() sur un cylindre de
rayon
sur un cylindre de
rayon ![]() est
est
![]() . Pour
. Pour ![]() spires on a donc
une longueur de
spires on a donc
une longueur de
![]() . Lorsque l'on passe passe à
la couche suivante le rayon devient
. Lorsque l'on passe passe à
la couche suivante le rayon devient ![]() où
où ![]() est le diamètre
du câble. Pour la
est le diamètre
du câble. Pour la ![]() ème ouche la longueur totale du câble
enroulé sur le tambour sera donc
ème ouche la longueur totale du câble
enroulé sur le tambour sera donc
![]()
Dans cette section on propose un ajour matériel très simple mais qui va permettre à la fois de réaliser la calibration de manière automatique mais aussi d'améliorer l'estimation des longueurs de câble. Pour la calibration nous avons vu qu'il est nécessaire d'avoir la longueur de chaque câble au démarrage du système ou avant son utilisation. Peut t'on concevoir un système qui pourrait automatiquement déterminer à un moment donné la longueur du câble et nous fournirait donc cette information ?
Pour cela on va modifier légèrement le matériel du CDPR, en supposant que câble est synthétique:
Avec ce dispositif
l'ordinateur va être capable de détecter quand
la marque passe au point ![]() puisque le ruban sur le câble crée à
ce moment un contact électrique (ou un changement de couleur). En
pratique avant le montage du câble on place manuellement la marque
à une distance connue de l'extrémité du câble.
Au démarrage du
système on s'arrange pour que chaque marque soit après le point
puisque le ruban sur le câble crée à
ce moment un contact électrique (ou un changement de couleur). En
pratique avant le montage du câble on place manuellement la marque
à une distance connue de l'extrémité du câble.
Au démarrage du
système on s'arrange pour que chaque marque soit après le point ![]() de chaque câble. On enroule alors les câbles jusqu'à ce que
l'ordinateur détecte le passage du câble au point
de chaque câble. On enroule alors les câbles jusqu'à ce que
l'ordinateur détecte le passage du câble au point ![]() , auquel cas
il arrête le déroulement. Lorsque tous les câbles sont arrêtés
on sait quelle est la longueur de chaque câble: le système est
calibré.
, auquel cas
il arrête le déroulement. Lorsque tous les câbles sont arrêtés
on sait quelle est la longueur de chaque câble: le système est
calibré.
Mais la marque peut encore servir après la calibration. Lors du
mouvement du CDPR il peut arriver qu'elle passe à nouveau au point
![]() . A chacun de ces évènement on peut donc mettre à jour la
longueur estimée du câble et ainsi corriger la dérive de cette
estimation due au caractère aléatoire de l'enroulement sur le
tambour. Mais on peut encore améliorer le système en plaçant
sur chacun des câbles une deuxième marque entre la marque de
calibration et le point
. A chacun de ces évènement on peut donc mettre à jour la
longueur estimée du câble et ainsi corriger la dérive de cette
estimation due au caractère aléatoire de l'enroulement sur le
tambour. Mais on peut encore améliorer le système en plaçant
sur chacun des câbles une deuxième marque entre la marque de
calibration et le point ![]() ,
à une distance connue de
,
à une distance connue de ![]() . Pour le système à ruban conducteur
on choisira cette distance pour qu'elle diffère sensible de celle de
la marque de calibration. Pour le
système à couleur la couleur de cette marque sera choisie
différente de celle de la marque de calibration. Lors du
passage d'une marque en
. Pour le système à ruban conducteur
on choisira cette distance pour qu'elle diffère sensible de celle de
la marque de calibration. Pour le
système à couleur la couleur de cette marque sera choisie
différente de celle de la marque de calibration. Lors du
passage d'une marque en ![]() si l'on sait dire quelle marque est
détectée alors on
connaît la longueur courante du câble.
Avec le dispositif à couleur
reconnaître la marque est trivial. Pour le
dispositif à marque métallique on dispose à tout moment de l'estimation de
longueur du câble, un peu différente de la longueur réelle mais
qui en reste proche: lors d'une détection de marque on identifiera
la marque en choisissant celle dont la distance au point
si l'on sait dire quelle marque est
détectée alors on
connaît la longueur courante du câble.
Avec le dispositif à couleur
reconnaître la marque est trivial. Pour le
dispositif à marque métallique on dispose à tout moment de l'estimation de
longueur du câble, un peu différente de la longueur réelle mais
qui en reste proche: lors d'une détection de marque on identifiera
la marque en choisissant celle dont la distance au point ![]() est la
plus proche de l'estimation.
est la
plus proche de l'estimation.
Bien entendu rien n'empêche de placer
sur le câble plus de deux marques. Pour le système à couleur le
nombre de couleur détectable est limité mais on peut parfaitement
se limiter à 3 couleurs possibles pour les marques: rouge, vert,
bleu. La marque sera reconnue d'abord par sa couleur puis pour les
marques de cette couleur on choisira celle dont la distance à ![]() est la plus proche de la longueur estimée. On fera de même pour
les marques à ruban conducteur. Avec ce type de
dispositif on obtient alors un système qui périodiquement remet
à jour l'estimation des longueurs des câbles et limite donc
considérablement la dérive de cette estimation. Il conviendra
cependant de vérifier périodiquement l'état des marques et les
renouveler si nécessaire.
est la plus proche de la longueur estimée. On fera de même pour
les marques à ruban conducteur. Avec ce type de
dispositif on obtient alors un système qui périodiquement remet
à jour l'estimation des longueurs des câbles et limite donc
considérablement la dérive de cette estimation. Il conviendra
cependant de vérifier périodiquement l'état des marques et les
renouveler si nécessaire.
Peut t'on relâcher la contrainte de la calibration qui consiste à démarrer d'une position où l'on connaît le sens à donner à la rotation du tambour pour que la marque de calibration soit détectée ? On va traiter séparément les cas où les marques sont électriques et celui où les marques sont de couleur.
Pour les marques électriques supposons que l'on a placé au moins 3
marques, les distances entre marques successives étant
significativement différentes. Par exemple pour un câble dont la
longueur entre ![]() et
et ![]() est au maximum de 10 mètres on va placer
une marque à 6 mètres de
est au maximum de 10 mètres on va placer
une marque à 6 mètres de ![]() , la suivante à 5 mètres et la
troisième à 3.5 mètres. Ces marques sont numérotées de 1 à
3. La calibration se fait câble par
câble en enroulant le câble. A un moment une marque est
détectée mais on ne sait pas dire quel est le numéro de cette
marque. On continue l'enroulement jusqu'à la détection d'une
nouvelle marque. On a mesuré la rotation du tambour entre les deux
détections et en prenant un rayon moyen pour le tambour on a une
estimation de la distance entre les deux marques détectées dont la
valeur exacte est 1 mètre (marque 1 et 2 détectées) où 1.5
mètre (marque 2 et 3 détectée). En comparant l'estimation et les
2 possibilités de distance on peut déterminer le numéro de la
dernière marque et donc calibrer le câble.
, la suivante à 5 mètres et la
troisième à 3.5 mètres. Ces marques sont numérotées de 1 à
3. La calibration se fait câble par
câble en enroulant le câble. A un moment une marque est
détectée mais on ne sait pas dire quel est le numéro de cette
marque. On continue l'enroulement jusqu'à la détection d'une
nouvelle marque. On a mesuré la rotation du tambour entre les deux
détections et en prenant un rayon moyen pour le tambour on a une
estimation de la distance entre les deux marques détectées dont la
valeur exacte est 1 mètre (marque 1 et 2 détectées) où 1.5
mètre (marque 2 et 3 détectée). En comparant l'estimation et les
2 possibilités de distance on peut déterminer le numéro de la
dernière marque et donc calibrer le câble.
Un processus un peu plus complexe peut être utilisé si l'on a plus de 3 marques avec un nombre limité de distances possibles entre les marques (par exemple 1.5, 1, 0.5 mètres). Après la détection des deux premières marques on estime leur distance d'après la rotation du tambour, disons 1.2 mètres. On regarde alors dans la liste des distances entre marques toutes les paires dont la distance est égale à 1 mètres. Il peut y en avoir plusieurs donc on continue l'enroulement jusqu'à la détection d'une nouvelle marque, la distance de celle-ci à la marque précédente étant estimée par exemple a 0.6 mètres. On regarde alors les triplets de marques dont la distance entre la première et la seconde est de 1 mètres et la distance entre la deuxième et la troisième de 0.5 mètres. On continue les processus jusqu'à ce qu'il n'y ait plus qu'une possibilité ce qui nous dit quel est le numéro de la dernière marque détectée. On peut montrer qu'en général la détection de 3 marques suffit à calibrer le câble.
Considérons maintenant le cas des marques de couleur en supposant qu'on utilise 3 couleurs pour les marques: rouge (R), vert (V), bleu (B). L"astuce ici va être placer les marques de façon à ce si l'on regarde la séquence de couleurs de 3 marques qui se suivent alors il n'existe qu'un endroit sur le câble où l'on va trouver une séquence donnée. Par exemple considérons que les couleurs des marques sur les câbles est
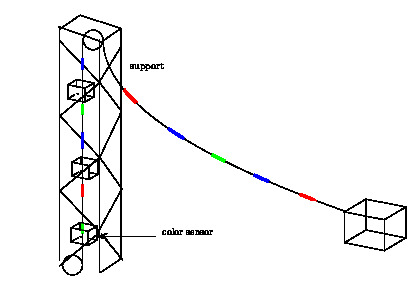
On peut même aller plus loin pour améliorer la fréquence avec laquelle on obtient une information exacte sur la longueur du câble. Pour cela on va placer non pas une station de détection sur le mât mais plusieurs, ce qui est montré sur la figure 17 dans le cas des marques de couleur. Les stations de détection sont les boîtes placées sur le mât.
|
Entre deux détections on utilise l'estimation de la longueur reposant sur la mesure de la rotation du tambour, qui va être même améliorée: lors de deux détections successives on a à la fois la variation de longueur du câble et la rotation du tambour ce qui va fournir une estimée du rayon moyen réel du tambour, ce qui peut réduire les effets d'un enroulement un peu erratique. Un tel dispositif, facile à mettre en oeuvre, permet une amélioration significative de l'estimation des longueurs des câbles et donc de la précision du CDPR.
Comme indiqué il faut cependant veiller à ce que la détection des marques ne soit pas simultanée. Par exemple une mauvaise disposition des stations est de les mettre à une distance identique l'une de l'autre et de choisir cette même distance comme distance entre les marques. En effet avec cette disposition 3 marques arrivent simultanément sur les 3 stations, ce qui revient à n'avoir qu'un événement au lieu de 3.
La vidéo suivante montre ce qui se passe avec une ou trois stations de détection pour le même marquage du câble et la même quantité de câble enroulée. Les cercles en bas de la figure, représentent les détections des stations: ils sont incolores si la station ne détecte aucune couleur et changent de couleur lorsqu'une marque de cette couleur est détectée. Le nombre de détection de chaque station ainsi que le nombre total de détection sont indiqués. On voit qu'au prix d'un petit effort matériel d'augmentation du nombre de stations, le nombre de détection augmente considérablement pour un enroulement donné.
Le principe que nous avons décrit est similaire à celui du vernier qui est utilisé pour améliorer la précision de la mesure des longueurs avec un pied à coulisse. Nous avons utilisé ce dispositif pour notre prototype de CDPR MARIONET-ASSIST.