Dans cette seconde partie nous allons présenter des approches encore expérimentales qui permettent d'aller encore plus loin dans l'amélioration des performances d'un CDPR. Ces approches ont été mises en oeuvre dans notre dernier prototype de CDPR, MARIONET-3D.
Pour un CDPR à 4 câbles le système décrit dans la section précédente ne résoudra pas toujours le problème de savoir quels sont les câbles non tendus, information nécessaire pour connaître la position du CDPR, mais permettra dans une certaine mesure de ne pas avoir un câble très détendu. Pour une détection plus sure des câbles non tendus nous allons nous intéresser à leur forme.
Dispose t'on une autre caractéristique
qui permettrait d'identifier qu'un câble n'est pas tendu ? Pour
répondre à cette question il faut examiner la forme d'un câble
attaché en 2 points fixes (ici les points ![]() et
et ![]() ) et de longueur
supérieur à la distance entre
) et de longueur
supérieur à la distance entre ![]() et
et ![]() . C'est un
sujet qui a été très étudié en génie civil et on va se limiter au cas
où le matériel du câble n'est pas élastique. On a alors
affaire à un câble dit caténaire dont la forme est
parfaitement connue à partir du moment où l'on connaît la
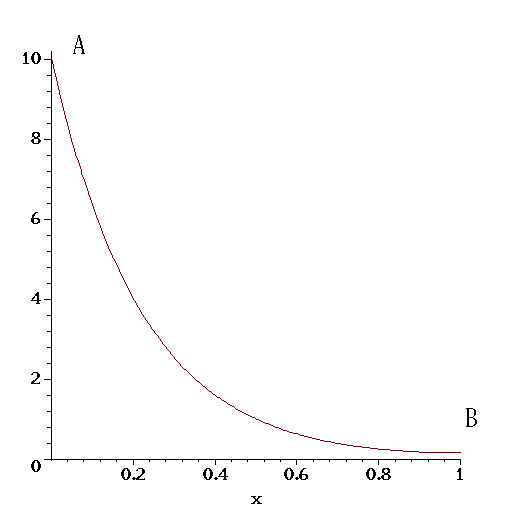
position des points fixes et la longueur du câble. Un exemple de
caténaire est présenté dans la figure 18.
. C'est un
sujet qui a été très étudié en génie civil et on va se limiter au cas
où le matériel du câble n'est pas élastique. On a alors
affaire à un câble dit caténaire dont la forme est
parfaitement connue à partir du moment où l'on connaît la
position des points fixes et la longueur du câble. Un exemple de
caténaire est présenté dans la figure 18.
On voit qu'il y a une différence sensible entre la forme caténaire
et le câble tendu et qu'en particulier l'angle entre le câble et
l'horizontal varie tout au long du câble. Pour donner une idée un
câble
synthétique d'environ 5 mètres aura en ![]() une différence d'angle
entre le câble tendu et le détendu d'environ 2.5 degrés (ce qui
est visuellement détectable) si la
longueur du câble est de 2 cm plus long que la longueur tendue.
La vidéo suivante montre la déformation d'un câble
Dyneema de 3mm de diamètre, fixé à
deux points fixes et dont on augmente progressivement la longueur. La
longueur initiale est de 600cm.
une différence d'angle
entre le câble tendu et le détendu d'environ 2.5 degrés (ce qui
est visuellement détectable) si la
longueur du câble est de 2 cm plus long que la longueur tendue.
La vidéo suivante montre la déformation d'un câble
Dyneema de 3mm de diamètre, fixé à
deux points fixes et dont on augmente progressivement la longueur. La
longueur initiale est de 600cm.
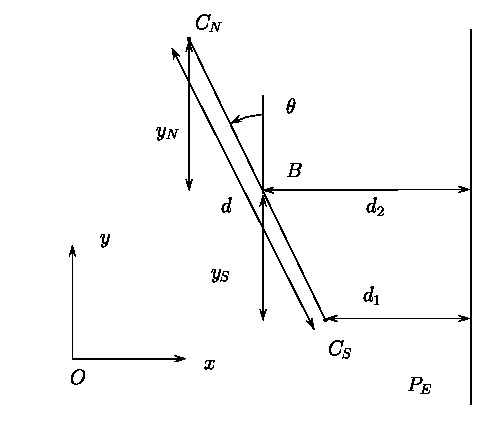
De quoi avons nous besoin pour avoir la forme du
câble dans sa position actuelle ? On peut montrer que
l'intégralité du câble se trouve en général dans le plan
vertical qui
contient les deux points d'attache et que pour obtenir sa forme il
faut avoir 3
informations sur le système, par exemple la position de ![]() (2
paramètres) et la
longueur du câble. Malheureusement à ce stade nous n'avons pas ces
informations de manière précise.
(2
paramètres) et la
longueur du câble. Malheureusement à ce stade nous n'avons pas ces
informations de manière précise.
Si ![]() et
et ![]() sont connus on peut calculer numériquement
sont connus on peut calculer numériquement
![]() mais là aussi
il n'y a pas de formule donnant directement leurs
valeurs.
En introduction à la section suivante on va s'intéresser à
la pente du câble à l'abscisse curviligne
mais là aussi
il n'y a pas de formule donnant directement leurs
valeurs.
En introduction à la section suivante on va s'intéresser à
la pente du câble à l'abscisse curviligne ![]() (compris entre 0 et
(compris entre 0 et
![]() ) est alors
) est alors
Il existe une version plus élaborée des équations
(10), (11) qui permet de prendre en compte l'élasticité du matériel du câble via la donnée de son
module de Young.
Cette formule n'a cependant qu'un intérêt pour les câbles très
élastique et/ou de grande dimensions. Dans ce cas les modèles
géométriques aussi bien inverse que directe peuvent avoir
plusieurs solutions (on a trouvé des exemples avec 5 solutions au
modèle géométrique inverse et plus d'une trentaine au modèle
direct). Toutefois la résolution complètes (c'est-à-dire trouver
l'ensemble des solutions) de ces modèles restent encore un
problème ouvert car les algorithmes capables de calculer les
solutions sont coûteux en temps de calcul. Toutefois dans le cas de
l'exploitation d'un CDPR il existe des méthodes numériques très
rapides qui peuvent résoudre le modèle direct en exploitant le
fait qu'entre deux calculs de ce type la variation de longueur des
câbles est très faible et donc la solution correspondante à
l'état du CDPR doit être très proche de la solution
précédemment trouvée.
Pour le moment nous avons parlé de l'angle ![]() du câble avec
l'horizontal mais on peut aussi considérer celui autour de l'axe
vertical
du câble avec
l'horizontal mais on peut aussi considérer celui autour de l'axe
vertical ![]() . Pour une position de
. Pour une position de ![]() connue cet angle
connue cet angle ![]() est unique pour
chaque câble. Pour les CDPR à 4 câbles nous avons vu
que selon la configuration qui est utilisé pour calculer la position
de
est unique pour
chaque câble. Pour les CDPR à 4 câbles nous avons vu
que selon la configuration qui est utilisé pour calculer la position
de ![]() à partir des longueurs des câbles nous obtenons des
positions différentes et donc des angles
à partir des longueurs des câbles nous obtenons des
positions différentes et donc des angles ![]() distincts.
Toutefois les positions de
distincts.
Toutefois les positions de ![]() restent relativement voisines et en
conséquence les différences entre les angles
restent relativement voisines et en
conséquence les différences entre les angles ![]() vont être
faibles. Si l'on veut utiliser des mesures des
vont être
faibles. Si l'on veut utiliser des mesures des ![]() pour déterminer
le câble non tendu il sera donc nécessaire de mesurer très
précisément cet angle.
pour déterminer
le câble non tendu il sera donc nécessaire de mesurer très
précisément cet angle.
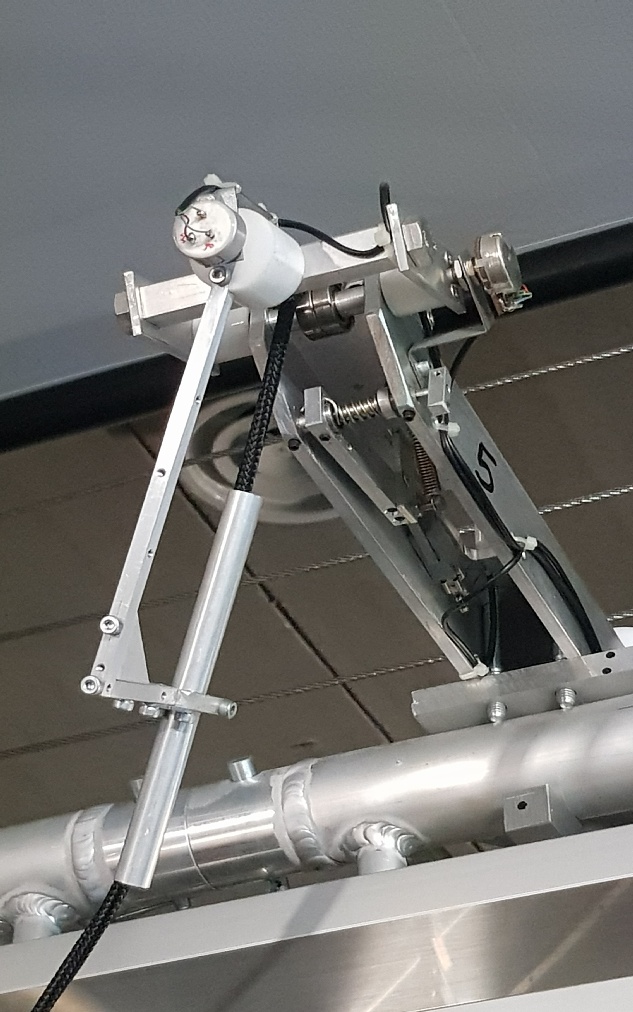
Pour cette mesure on pourrait penser à un système mécanique par
qui mesure de combien tourne les câbles en ![]() . Pour cela on peut
utiliser une réglette qui tourne autour d'un axe
horizontal passant par
. Pour cela on peut
utiliser une réglette qui tourne autour d'un axe
horizontal passant par ![]() , qui supporte un tube pouvant tourner autour
d'un axe perpendiculaire au précédent
par lequel passe le câble (figure 19).
, qui supporte un tube pouvant tourner autour
d'un axe perpendiculaire au précédent
par lequel passe le câble (figure 19).
Un système optique est plus approprié puisqu'il n'influence pas
l'angle ![]() .
Une caméra placée en
.
Une caméra placée en ![]() peut être utilisée:
dans l'image on peut repérer le câble et en déduite l'angle
peut être utilisée:
dans l'image on peut repérer le câble et en déduite l'angle
![]() . Toutefois cette mesure est sensible au condition d'illumination
et sa précision décroît avec la taille du CDPR.
. Toutefois cette mesure est sensible au condition d'illumination
et sa précision décroît avec la taille du CDPR.
On peut aussi utiliser une autre approche qui utilise un capteur de distance de type télémètre laser monté sur une tête rotative et qui effectue une mesure de distance à intervalle régulier lors de la rotation: ces capteurs sont appelés des lidars. On obtient alors un nuage de point dans le repère du capteur. Il existe des lidars très coûteux qui font des mesures 3D mais il existe aussi des lidars qui se contentent de mesurer dans un plan pour une centaine d'euros (figure 20).

|
La vidéo ci-dessous montre le fonctionnement d'un lidar. La tête rotative au centre émet une impulsion de lumière laser (la flèche rouge partant de la tête). Si le laser rencontre un obstacle (le point noir sur l'obstacle il y a réflection de la lumière vers la tête rotative (flèche rouge orientée vers la tête). La mesure du temps entre émission et réception multipliée par la vitesse de la lumière donne le double de la distance entre la tête et l'obstacle dans cette direction. On obtient ainsi une collection de point sur les obstacles (les cercles noirs sur les obstacles) dont on connaît les positions .
Nous verrons dans la section
10.1.8 comment faire un lidar à moindre coût. Un lidar est
caractérisé par sa portée qui est la distance maximum à
laquelle il peut détecter un obstacle et par une distance minimum
(en dessous de cette distance il ne peut pas la mesurer). Dans le cas de
la mesure des angles en ![]() il faut un lidar qui ait une distance
minimum de l'ordre du centimètre et une portée de l'ordre de 30 cm.
Lors de son balayage ce type de lidar va voir uniquement quelques points
sur le câble car les obstacles en dehors du câble sont hors de
portée. A partir de ces points et moyennant que l'on connaisse la
position du lidar par rapport à
il faut un lidar qui ait une distance
minimum de l'ordre du centimètre et une portée de l'ordre de 30 cm.
Lors de son balayage ce type de lidar va voir uniquement quelques points
sur le câble car les obstacles en dehors du câble sont hors de
portée. A partir de ces points et moyennant que l'on connaisse la
position du lidar par rapport à ![]() et son orientation on peut
calculer les angles
et son orientation on peut
calculer les angles ![]() et
et ![]() en
en ![]() . En plaçant un lidar
proche de
. En plaçant un lidar
proche de ![]() on pourra aussi mesurer les angles en
on pourra aussi mesurer les angles en ![]() . Les tests
ont montré que la précision de mesure était de l'ordre de 0.5
à 1 degré. Cette précision sur l'angle
. Les tests
ont montré que la précision de mesure était de l'ordre de 0.5
à 1 degré. Cette précision sur l'angle
![]() n'est pas suffisante pour faire
la distinction entre les différentes positions de
n'est pas suffisante pour faire
la distinction entre les différentes positions de ![]() que l'on
peut obtenir à partir des longueurs de câble. Par contre la mesure
de
que l'on
peut obtenir à partir des longueurs de câble. Par contre la mesure
de ![]() permettra de déterminer assez précisément si un câble
est tendu ou non.
permettra de déterminer assez précisément si un câble
est tendu ou non.
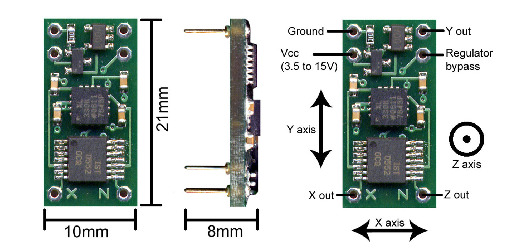
Une autre manière de mesurer l'angle ![]() est d'utiliser un accéléromètre (figure 21). Ce capteur mesure
l'accélération auquel le
capteur est soumis dans trois directions de l'espace: deux dans le
plan du capteur et une autour de la normale à ce plan.
est d'utiliser un accéléromètre (figure 21). Ce capteur mesure
l'accélération auquel le
capteur est soumis dans trois directions de l'espace: deux dans le
plan du capteur et une autour de la normale à ce plan.
A l'arrêt
cette accélération est seulement
celle due à la gravité donc est verticale. En mouvement il y a en
plus l'accélération du mouvement mais on va supposer qu'elle est
faible. On place l'accéléromètre parallèle au câble (sur la
figure l'axe y). On peut alors montrer qu'avec la mesure le
l'accéléromètre en x et y on peut calculer l'angle du câble
avec l'horizontale. On peut mettre un tel dispositif non loin de ![]() de façon à ne pas gêner l'enroulement du câble. La
précision de la mesure est de l'ordre de 0.5 à 1 degrés à
l'arrêt mais de 2 à 8 degrés en mouvement.
de façon à ne pas gêner l'enroulement du câble. La
précision de la mesure est de l'ordre de 0.5 à 1 degrés à
l'arrêt mais de 2 à 8 degrés en mouvement.
Avec le dispositif ci-dessus on peut donc mesurer l'angle
![]() en un point particulier du câble. Cela peut être
suffisant
pour détecter quel câble est détendu si
l'estimation des longueurs
des câbles est suffisamment précise
pour avoir une bonne estimation des
positions possibles de
en un point particulier du câble. Cela peut être
suffisant
pour détecter quel câble est détendu si
l'estimation des longueurs
des câbles est suffisamment précise
pour avoir une bonne estimation des
positions possibles de ![]() , ce qui ne sera pas toujours le
cas.
, ce qui ne sera pas toujours le
cas.
A noter que beaucoup de cartes électroniques incluent, outre l'accéléromètre, un gyromètre qui mesure la vitesse de rotation du capteur autour des mêmes axes que l'accéléromètre et un compas magnétique qui mesure l'angle entre l'axe du capteur et le nord magnétique.
Évidemment être capable de mesurer directement la position de ![]() avec une précision correcte serait un gros avantage: à partir de
cette mesure on pourrait directement calculer la longueur des câbles
en les supposant tendus sans avoir à passer par la mesure
de la rotation des tambours. Remarquons toutefois que
cela ne permet pas de savoir si un câble est tendu ou non.
avec une précision correcte serait un gros avantage: à partir de
cette mesure on pourrait directement calculer la longueur des câbles
en les supposant tendus sans avoir à passer par la mesure
de la rotation des tambours. Remarquons toutefois que
cela ne permet pas de savoir si un câble est tendu ou non.
Si l'on suppose que le sol est plat, obtenir une estimation de la
hauteur de ![]() n'est pas trop difficile. Il suffit par exemple de
mettre un capteur de distance selon la verticale. Mais le capteur de
distance est forcément en dessous de
n'est pas trop difficile. Il suffit par exemple de
mettre un capteur de distance selon la verticale. Mais le capteur de
distance est forcément en dessous de ![]() et sa mesure va donc
être influencée par les oscillations de la charge.
et sa mesure va donc
être influencée par les oscillations de la charge.
Une solution plus robuste est de placer un lidar sur la
charge,
dont le rôle va être de mesurer non
pas un point au sol mais plusieurs. Une opération mathématique
simple permet alors non seulement d'estimer la hauteur de ![]() à
quelques millimètres près mais aussi d'évaluer l'amplitude de
l'oscillation de la charge autour d'un axe particulier. Pour cette
mesure il n'est pas nécessaire d'avoir une rotation complète du
lidar: une mesure de
à
quelques millimètres près mais aussi d'évaluer l'amplitude de
l'oscillation de la charge autour d'un axe particulier. Pour cette
mesure il n'est pas nécessaire d'avoir une rotation complète du
lidar: une mesure de ![]() 5 degrés autour de l'axe du lidar est
suffisante.
5 degrés autour de l'axe du lidar est
suffisante.
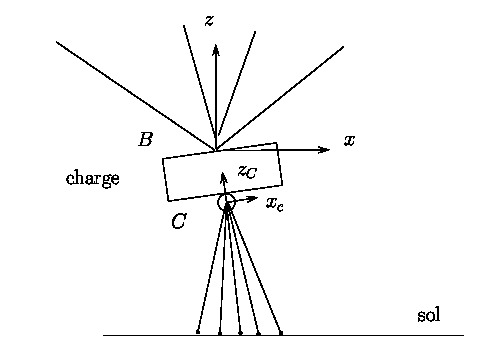
Un lidar placé sous la charge mesure la distance entre le centre du lidar et le sol selon plusieurs angles (figure 22).
Pour chacun de ces points la distance et la direction sont mesurées. On a donc les coordonnées de ces points dans le repère
Pour faire fonctionner un CDPR on a défini des directions possibles
de mouvement: haut/bas, gauche/droite, avant/arrière. Pour ces deux
dernières directions cela veut dire que l'on a défini deux directions
spécifiques, perpendiculaires l'une à l'autre, que l'on a appelle
![]() et
et ![]() . On a aussi choisi un point particulier
. On a aussi choisi un point particulier ![]() dans l'espace tel que l'on
définit la position de
dans l'espace tel que l'on
définit la position de ![]() par la distance entre
par la distance entre ![]() et
et ![]() selon
les deux axes
selon
les deux axes ![]() ,
, ![]() .
Plus simplement imaginez une pièce carré ou on a placé
.
Plus simplement imaginez une pièce carré ou on a placé ![]() au
sol dans un des coins où deux murs perpendiculaires se rejoignent.
L'axe
au
sol dans un des coins où deux murs perpendiculaires se rejoignent.
L'axe ![]() part de
part de ![]() et suit le pied d'un mur et l'axe
et suit le pied d'un mur et l'axe ![]() part de
part de
![]() et suit l'autre mur. Si l'on place un objet dans la pièce et que
l'on mesure la distance de l'objet à chacun des murs on aura
complètement localisé l'objet.
et suit l'autre mur. Si l'on place un objet dans la pièce et que
l'on mesure la distance de l'objet à chacun des murs on aura
complètement localisé l'objet.
Imaginons maintenant que nous plaçons deux
plaques planes verticales autour du CDPR dans une position connue,
l'une perpendiculaire à ![]() ,
l'autre à
,
l'autre à ![]() (dans notre pièce ces plaques peuvent être les
deux murs
(dans notre pièce ces plaques peuvent être les
deux murs ![]() ,
, ![]() ). Un lidar placé sur le support
de la charge va
mesurer des points sur ces plaques et une opération mathématique
simple permet de déduire des mesures la distance de l'objet aux
plaques, donc de mesurer la position de la charge.
). Un lidar placé sur le support
de la charge va
mesurer des points sur ces plaques et une opération mathématique
simple permet de déduire des mesures la distance de l'objet aux
plaques, donc de mesurer la position de la charge.
En pratique il est
souhaitable d'en placer plus de deux car selon la position de la
charge un
lidar peut ne voir que très peu de points d'une des plaques, voire
aucun. Sur la figure 23 on a placé 3 plaques verticales ![]() autour du CDPR, en dehors de la zone atteignable par
autour du CDPR, en dehors de la zone atteignable par ![]() et deux lidars
et deux lidars ![]() placés de part et d'autre de
placés de part et d'autre de ![]() . Le lidar
. Le lidar
![]() voit bien la plaque
voit bien la plaque ![]() et
mesure la position de points
et
mesure la position de points ![]() sur
sur ![]() mais très peu de points
sur
mais très peu de points
sur ![]() . Le lidar
. Le lidar ![]() lui voit des points sur
lui voit des points sur ![]() et
et ![]() .
.
|
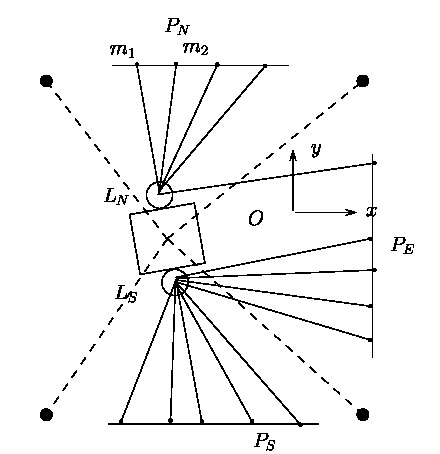
La vidéo suivante illustre ce principe dans une pièce avec 4
plaques. Sur la charge sont placés deux lidars, l'un ![]() au nord,
l'autre
au nord,
l'autre ![]() au sud dans une position symétrique par rapport à
au sud dans une position symétrique par rapport à
![]() . On a volontairement réduit la vitesse de rotation
des lidars et pris un grand pas pour leur rotation. On voit sur les
plaques pendant la rotation des lidars les points identifiés par les
lidars sur les plaques (en vert pour le lidar nord et en rouge pour le
lidar sud). On voit clairement les instants où les lidars ne donnent
pas de mesure en raison d'une occultation due à la charge ou lorsque la
distance à un obstacle est supérieure à leur porté.
Lorsque les lidars ont fait une rotation complète la charge se
déplace. Dans la réalité la charge se déplace en permanence
mais vu le temps faible d'acquisition des lidars (typiquement moins de
0.1 seconde) le déplacement de la charge pendant l'acquisition peut
être négligé.
. On a volontairement réduit la vitesse de rotation
des lidars et pris un grand pas pour leur rotation. On voit sur les
plaques pendant la rotation des lidars les points identifiés par les
lidars sur les plaques (en vert pour le lidar nord et en rouge pour le
lidar sud). On voit clairement les instants où les lidars ne donnent
pas de mesure en raison d'une occultation due à la charge ou lorsque la
distance à un obstacle est supérieure à leur porté.
Lorsque les lidars ont fait une rotation complète la charge se
déplace. Dans la réalité la charge se déplace en permanence
mais vu le temps faible d'acquisition des lidars (typiquement moins de
0.1 seconde) le déplacement de la charge pendant l'acquisition peut
être négligé.
En utilisant la même technique que pour le lidar de hauteur on peut
mesurer les coordonnées des centres ![]() ,
, ![]() des lidars
dans le repère
des lidars
dans le repère ![]() . Les coordonnées de
. Les coordonnées de ![]() sont alors la
moitiés de la somme des coordonnées de
sont alors la
moitiés de la somme des coordonnées de ![]() .
.
Lors d'un déplacement la charge peut tourner autour de l'axe
vertical. Cela ne perturbera le calcul des coordonnées de ![]() mais
de plus,
sans entrer dans les détails, les mesures lidar
permettent aussi de mesurer de combien la charge a tourné.
mais
de plus,
sans entrer dans les détails, les mesures lidar
permettent aussi de mesurer de combien la charge a tourné.
En pratique un lidar bas coût a un pas de rotation de l'ordre de 0.45
degrés et l'on peut faire 3 rotations complètes en 0.1
seconde. Pour un CDPR qui se déplace à vitesse modérée
(typiquement de quelques centimètres par seconde) on peut estimer
que le changement de position de ![]() en 0.1 seconde est
suffisamment faible pour être négligé. Si les plaques sont
suffisamment longues et bien visibles par les lidars on obtiendra alors un
nombre important de points de mesure et donc une bonne précision
pour la localisation de
en 0.1 seconde est
suffisamment faible pour être négligé. Si les plaques sont
suffisamment longues et bien visibles par les lidars on obtiendra alors un
nombre important de points de mesure et donc une bonne précision
pour la localisation de ![]() .
Les tests avec les
lidars présentés sur la figure 20 ont montré que l'on
pouvait atteindre un précision de positionnement de l'ordre de 1 à
2 centimètres.
.
Les tests avec les
lidars présentés sur la figure 20 ont montré que l'on
pouvait atteindre un précision de positionnement de l'ordre de 1 à
2 centimètres.
La mesure des lidars des points sur les
les plans ![]() ,
, ![]() fournit les
coordonnées
fournit les
coordonnées ![]() ,
, ![]() de
de
![]() ,
, ![]() alors que la mesure de
alors que la mesure de ![]() fournit la coordonnée
selon
fournit la coordonnée
selon ![]() de
de
![]() , dont on
déduit les distances
, dont on
déduit les distances ![]() de
de ![]() à
à ![]() et
et ![]() de
de ![]() à
à ![]() . Soit
. Soit
![]() l'angle de la rotation autour de la verticale de la
charge. On a
l'angle de la rotation autour de la verticale de la
charge. On a
Nous avons vu que pour déterminer parfaitement la forme d'un câble il faut avoir 3 informations sur celui-ci. Nous allons étudier comment on peut combiner les mesures décrites dans les sections précédentes pour détecter les câbles non tendus et estimer la longueur réelle du câble.
On va supposer qu'un lidar nous fournit la hauteur de ![]() , un autre
l'angle
, un autre
l'angle ![]() du câble en
du câble en ![]() et qu'un autre dispositif l'angle
et qu'un autre dispositif l'angle ![]() soit en
soit en ![]() (lidar)
où en un point à distance connue de
(lidar)
où en un point à distance connue de ![]() (accéléromètre par exemple). Une transformation mathématique
complexe
permet alors de déterminer la longueur du câble, sa forme ainsi
que la position de l'extrémité du câble dans le plan vertical
qui contient le câble. A partir de ces informations on peut donc
obtenir à la fois la position de
(accéléromètre par exemple). Une transformation mathématique
complexe
permet alors de déterminer la longueur du câble, sa forme ainsi
que la position de l'extrémité du câble dans le plan vertical
qui contient le câble. A partir de ces informations on peut donc
obtenir à la fois la position de ![]() et déterminer quels sont les
câbles tendus. Toutefois ces calculs sont très sensibles aux
erreur de mesure et nos tests ont montré qu'avec les incertitudes
que nous avons sur les mesures ces calculs ne donnaient pas de bons
résultats.
et déterminer quels sont les
câbles tendus. Toutefois ces calculs sont très sensibles aux
erreur de mesure et nos tests ont montré qu'avec les incertitudes
que nous avons sur les mesures ces calculs ne donnaient pas de bons
résultats.
On a vu qu'avec 2 lidars horizontaux, 3 plans de référence et un
lidar pour mesurer la hauteur on pouvait obtenir une bonne estimation
de la position de ![]() . Avec cette estimation on obtient 2 informations
pour déterminer la forme ces câbles. Il suffit d'une troisième
information (par exemple l'angle
. Avec cette estimation on obtient 2 informations
pour déterminer la forme ces câbles. Il suffit d'une troisième
information (par exemple l'angle ![]() pour un point du câble
proche de
pour un point du câble
proche de ![]() ) pour obtenir la forme du câble. Il devient simple de
savoir si un câble est tendu ou non et d'avoir le moyen de
contrôler qu'un câble non tendu ne se détend pas trop. En effet
connaissant la position de
) pour obtenir la forme du câble. Il devient simple de
savoir si un câble est tendu ou non et d'avoir le moyen de
contrôler qu'un câble non tendu ne se détend pas trop. En effet
connaissant la position de ![]() on peut calculer exactement l'angle
on peut calculer exactement l'angle
![]() si le câble est tendu. S'il ne l'est pas
on a une mesure de la déviation de longueur par la différence
entre l'angle tendu et la mesure. Une autre approche serait de reconstruire
la longueur du câble (ce qui n'est pas une mince affaire)
et de travailler sur la différence longueur
de câble si tendu et longueur estimée. Toutefois la différence
angulaire aura, en général, une amplitude plus importante que la différence de
longueur lorsque l'on est prés de la situation tendue.
Ceci est montré sur le film suivant où partant de la longueur
tendu on allonge le câble. L'allongement du câble est montré en
bleu alors que l'angle est montré en rouge.
si le câble est tendu. S'il ne l'est pas
on a une mesure de la déviation de longueur par la différence
entre l'angle tendu et la mesure. Une autre approche serait de reconstruire
la longueur du câble (ce qui n'est pas une mince affaire)
et de travailler sur la différence longueur
de câble si tendu et longueur estimée. Toutefois la différence
angulaire aura, en général, une amplitude plus importante que la différence de
longueur lorsque l'on est prés de la situation tendue.
Ceci est montré sur le film suivant où partant de la longueur
tendu on allonge le câble. L'allongement du câble est montré en
bleu alors que l'angle est montré en rouge.
L'utilisation de la différence angulaire t constitue donc un meilleur choix pour l'ajustement de vitesse décrit dans la section précédente.
Nous avons vu que les lois de la mécanique imposent
que la charge va osciller durant les
mouvements d'un CDPR. Sans être trop technique on sait que la charge
peut osciller de trois manières (faites une recherche sur le web
avec les mots
roulis/tangage/lacet par exemple) en utilisant trois angles.
Sans entrer dans les détails
si vous placez un
accéléromètre en ![]() et que vous supposez qu'il est simplement
soumis à la gravité verticale, alors vous ne pourrez mesurer que
deux de ces trois angles.
Par exemple supposez que le capteur est horizontal et que la charge
tourne simplement autour de la verticale à vitesse constante (donc
l'accélération autour de l'axe vertical est nulle): le capteur
donnera alors toujours la même mesure, qui indique la direction de
la gravité et ne permettra donc pas d'évaluer la rotation.
et que vous supposez qu'il est simplement
soumis à la gravité verticale, alors vous ne pourrez mesurer que
deux de ces trois angles.
Par exemple supposez que le capteur est horizontal et que la charge
tourne simplement autour de la verticale à vitesse constante (donc
l'accélération autour de l'axe vertical est nulle): le capteur
donnera alors toujours la même mesure, qui indique la direction de
la gravité et ne permettra donc pas d'évaluer la rotation.
Nous
avons cependant vu l'utilisation des lidars pour la détermination de
la position sur les axes ![]() ,
, ![]() permettait la détermination de cette
rotation tandis que le lidar mesurant la hauteur permettait d'estimer
la rotation autour d'une axe horizontal. Si vous ne disposez pas de
ces lidars il existe une
solution: beaucoup d'accéléromètre mesure, outre les
accélérations, la direction du nord magnétique via un compas
magnétique.
La rotation de la charge va alors induire un
changement dans la direction du nord et ce changement vous donnera
approximativement la rotation de la charge. Il est cependant
impératif de ne pas avoir à proximité de la charge des masses
métalliques importantes et de ne pas mettre à proximité du
capteur des éléments électriques, comme un moteur,
car ce sont des éléments qui
créent un champ magnétique qui peut être très largement
supérieur à celui du nord magnétique et vont donc considérablement
perturber la mesure du compas.
Sous cette hypothèse nos tests ont
montré que l'on pouvait mesurer la rotation de la charge avec une
erreur maximale de l'ordre de deux à trois degrés.
permettait la détermination de cette
rotation tandis que le lidar mesurant la hauteur permettait d'estimer
la rotation autour d'une axe horizontal. Si vous ne disposez pas de
ces lidars il existe une
solution: beaucoup d'accéléromètre mesure, outre les
accélérations, la direction du nord magnétique via un compas
magnétique.
La rotation de la charge va alors induire un
changement dans la direction du nord et ce changement vous donnera
approximativement la rotation de la charge. Il est cependant
impératif de ne pas avoir à proximité de la charge des masses
métalliques importantes et de ne pas mettre à proximité du
capteur des éléments électriques, comme un moteur,
car ce sont des éléments qui
créent un champ magnétique qui peut être très largement
supérieur à celui du nord magnétique et vont donc considérablement
perturber la mesure du compas.
Sous cette hypothèse nos tests ont
montré que l'on pouvait mesurer la rotation de la charge avec une
erreur maximale de l'ordre de deux à trois degrés.
Une autre possibilité est l'utilisation du gyromètre qui mesure les vitesses de rotation autour des trois axes. Toutefois pour obtenir l'amplitude des rotations il va falloir procéder à une opération mathématique appelée intégration numérique qui permet de remonter de la vitesse de rotation à l'amplitude de la rotation. Malheureusement si la mesure du gyromètre n'est pas très précise l'estimation des rotations va rapidement s'écarter de leurs véritables valeurs.