|
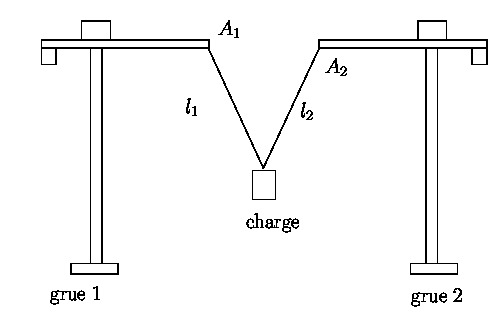
Pour faire simple nous allons partir d'une grue en nous focalisant sur le câble qui permet de faire monter et descendre la charge. Que se passerait t'il si au lieu d'une grue on en utilisait deux identiques pour manipuler la même charge placée exactement entre les 2 grues, figure 4 ?
Si les deux grutiers enroulent les câbles de leur grues exactement à la même vitesse on voit que la charge va monter verticalement. Ceci est illustré sur la vidéo suivante où, à droite on montre la vitesse de montée de la charge, qui n'est pas constante.
On voit sur cet exemple que l'angle entre le câble et la charge varie lors du mouvement. Ici la flexibilité naturelle du câble permet ce mouvement entre la charge et le câble (alors que si en place de câble on mettait un moteur rigide comme un vérin on serait obligé de mettre une articulation entre le vérin et la charge).
Si le grutier numéro 1 fait enrouler son câble plus rapidement que l'autre grutier alors la charge va continuer à monter mais va aussi s'approcher de la grue 1. Ceci est illustré sur la vidéo suivante avec le grutier de la grue bleu qui enroule son câble 50% plus vite que la grue rouge. Là aussi on voit que même si les grutiers enroulent leurs câbles à une vitesse constante, la vitesse de la charge elle n'est pas constante.
On fait on peut montrer qu'avec une bonne coordination des grutiers on pourrait faire déplacer la charge parfaitement à l'horizontal ou dans n'importe quelle direction. La vidéo suivante montre un mouvement de la charge parfaitement horizontal.
Mais pour réaliser ce mouvement les grutiers vont avoir à ajuster sans arrêt la vitesse de leurs câbles La vidéo suivante montre les vitesses des câbles nécessaires pour réaliser l'opération et l'on voit qu'elle sera très difficile à réaliser avec un contrôle manuel.
Par contre évidemment on ne peut placer la charge ailleurs qu'entre les 2 grues. On pourrait penser qu'utiliser deux grues n'a pas d'intérêt puisqu'une seule grue peut aussi faire ce travail. C'est exact sauf dans un cas: imaginons qu'une grue puisse soulever seulement 1.5 tonnes et que la charge soit de 2 tonnes. Avec deux grues les câbles des grues font monter la charge et leurs efforts s'additionnent. Sans rentrer dans les détails tant que les grues sont bien plus hautes que la charge et la charge a peu près au milieu entre les grues alors chaque grue n'aura à soulever qu'un peu plus de la moitié de la charge, soit 1 tonne: on peut donc réaliser la tâche. D'un point de vue mécanique on a deux systèmes qui agissent en parallèle sur l'objet à déplacer d'où le nom de robot parallèle et comme la source du mouvement est les câbles on parle de robot parallèle à câbles. Pour simplifier le texte nous utiliseront l'acronyme anglais CDPR (Cable-Driven Parallel Robot) pour désigner un robot parallèle à câbles.
Comme le robot peut réaliser deux types de mouvement (haut/bas, avant/arrière) on dira qu'il a 2 degrés de liberté.
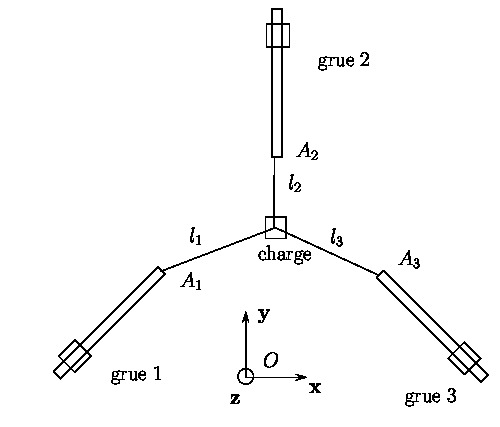
Supposons maintenant que la charge doit pouvoir aussi effectuer des mouvements gauche/droite. Pour cela on va rajouter une autre grue mais en respectant une règle: la 3ème grue ne doit pas être alignée avec les deux autres. En effet pour réaliser le mouvement gauche/droite il faut un câble qui peut tirer la charge dans cette direction. Un exemple d'un tel montage est présenté dans la figure (5) vu du dessus.
Avec cette disposition le système permet de réaliser les trois
mouvements désirés (déplacement selon ![]() ,
, ![]() et montée selon
et montée selon
![]() ) et donc possède 3 degrés de liberté.
La vidéo suivante montre un exemple de mouvement, combinant des
déplacements sur les trois axes (les traits en dessous la charge
permettent de voir le déplacement de la charge au sol et sa montée).
) et donc possède 3 degrés de liberté.
La vidéo suivante montre un exemple de mouvement, combinant des
déplacements sur les trois axes (les traits en dessous la charge
permettent de voir le déplacement de la charge au sol et sa montée).
Dans ce document nous allons nous intéresser au CDPR qui permettent uniquement de déplacer une charge dans une direction mais pas de la faire tourner. Il existe bien sûr des CDPR permettant aussi ces rotations: pour cela il suffit d'avoir 6 câbles qui sont attachés sur la charge en des points distincts avec pas plus de deux câbles attachés sur le même point: leur analyse est toutefois beaucoup plus complexe.
Nous supposerons aussi que la charge a une masse constante et qu'elle n'est soumise qu'à son poids.
En résumé pour construire un robot parallèle à câbles il faut:
On peut alors établir une classification arbitraire des CDPR en fonction de la longueur maximale des déplacements qu'il permet: