- 4.1.1 Treuil à tambour simple
- 4.1.2 Treuil à tambour avec spirale
- 4.1.3 Treuil à actionneur linéaire
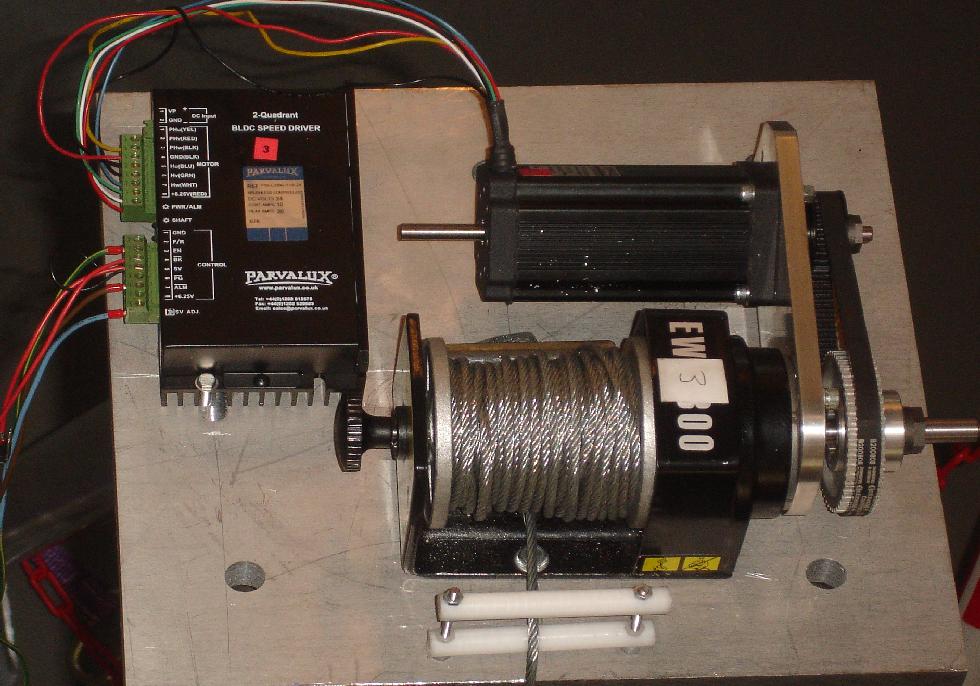
Dans cette technologie, très peu coûteuse, un simple tambour est le réceptacle du câble et il va tourner pour enrouler/dérouler le câble, éventuellement sur plusieurs couches (figure 6). Un moteur fait tourner le tambour et en généra on place entre le moteur et le tambour un mécanisme appelé réducteur dont l'objectif est d'avoir un tambour qui tourne moins vite que le moteur mais qui multiplie la force que le tambour peut exercer. Par exemple un réducteur de 10 fait que 10 tours de moteur ne crée qu'un tour du tambour alors que l'effort du moteur est multiplié par un facteur proche de 10 mais inférieur en raison des frottements dans le réducteur. Le réducteur peut être irréversible: le moteur peut faire tourner le tambour mais une force, même importante, exercée sur le câble ne fera pas tourner le tambour.
L'avantage de ce type de treuil, outre sa simplicité, est qu'il permet de stocker une grande quantité de câble. En terme de longueur de câble une spire sur le tambour correspond approximativement au périmètre du tambour. D'après la longueur du tambour et le diamètre du câble on peut calculer le nombre de spire que peut contenir le tambour et donc la longueur de câble enroulée pour une couche. Une fois qu'un couche est complète le rayon du tambour va augmenter du diamètre du câble: le périmètre du tambour va augmenter et donc la longueur de câble enroulée pour cette couche va être supérieur à la longueur du câble enroulée sur la couche précédente.
Dans l'exemple de la photo le rayon du tambour est de 1.5cm et pour un câble de diamètre 3mm peut contenir 20 spires. L'enroulement complet de la première couche permet alors d'enrouler 2.07 mètres de câble. Pour la couche suivante cette longueur passe à 2.54 mètres. Le rayon des flasques du tambour étant de 6.5 cm on peut avoir jusqu'à 17 couches. La longueur totale du câble sur le tambour est alors environ d'une centaine de mètres, en dépit de l'encombrement limité du treuil. On voit donc que cette technologie (et ses variantes) est appropriée pour construire des Ultrabots. Le treuil de la photo 6 est d'ailleurs celui que nous avons utilisé pour notre Ultrabot MARIONET-CRANE en modifiant un treuil bas-coût utilisé pour les véhicules 4X4.Les vidéos suivantes montrent l'augmentation de vitesse de la charge ainsi que l'évolution de la longueur d'enroulement pour un tour de tambour au fur et à mesures que le nombre de couche augmente.
Cette particularité est à la fois un avantage et un défaut de ce type de treuil. L'avantage est la possibilité de stocker une longueur importante de câble sur un treuil de petite dimension. Les inconvénients sont qu'un tour de tambour implique un changement de longueur du câble qui dépend de la couche sur lequel se trouve le câble et que pour tirer sur le câble avec la même force il faudra que le moteur exerce un effort plus important au fur et à mesure de l'accroissement du nombre de couches. De plus l'enroulement sur le tambour n'est régulier que si la tension du câble est suffisante sinon il peut être arbitraire avec localement plusieurs couches sur une partie du tambour et un autre nombre de couche sur le reste. On verra dans la suite qu'une méthode classique pour déterminer la variation de longueur d'un câble et de mesurer la rotation du tambour en supposant que son rayon est connu: un enroulement arbitraire sur le tambour va donc conduire à une erreur sur la longueur du câble.
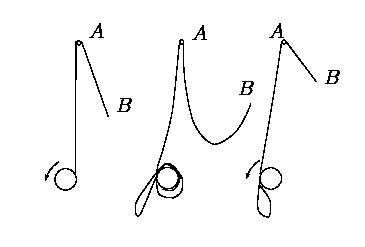
Un point essentiel de fonctionnement de ce type de treuil est de s'assurer qu'il y a toujours une tension au niveau du tambour pour que le câble s'enroule sur le tambour. Évidemment si la charge ou une partie d'entre elle est supportée par le câble alors il sera bien en tension mais nous verrons plus loin qu'on peut avoir fréquemment des cas où la tension imposée par la charge sur un câble peut (en fait doit) être nulle. Dans ce cas la seule tension sur le câble au niveau du tambour résulte du poids du câble entre le tambour et le haut du mât (qui joue un rôle négatif sur la tension au niveau du tambour), la masse du câble après le haut du mât (qui crée effectivement une tension sur le tambour) et les frottements mécaniques (qui ont un rôle négatif). Comme on utilise en général des câbles de faible masse la somme de tous ces effets peut conduire à une tension nulle (voire même négative) au niveau du tambour. Dans ce cas si l'on cherche à dérouler le câble sa partie déroulé va s'accumuler au niveau du tambour. Lors d'un enroulement de câble après cette phase de déroulement la façon dont le câble s'enroule sur le tambour devient erratique, ce qui influencera négativement notre commande (ce que l'on verra plus loin). Dans le pire des cas il peut se former une boucle qui vient se mettre dans le tambour et en modifier totalement le fonctionnement: si l'on demande au moteur de faire tourner le tambour pour qu'il enroule du câble l'effet de la rotation du tambour va être en fait de dérouler le câble (et réciproquement), ce qui conduit bien sût au dysfonctionnement du système: alors qu'on cherche à faire descendre la charge le CDPR la fait monter (figure 7).... C'est l'effet de boucle.
|
Une première solution pour éviter un tel dysfonctionnement est de placer un système mécanique en haut des mâts qui va assurer une tension positive dans le câble dans sa partie entre le haut du mât et le tambour. Par exemple une roue à galet motorisé peut jouer ce rôle mais a une influence négative sur l'usure du câble. Nous verrons plus loin qu'il existe une autre solution qui consiste à jouer sur la vitesse de rotation du tambour.
Certains treuils simples sont équipés d'un mécanisme qui
déplace le point d'arrivée du câble sur le tambour au fur et à
mesure de son enroulement pour essayer d'obtenir un enroulement
régulier avec des spires jointives. C'est le cas par exemple pour
l'Ultrabot
Skycam,
le CDPR qui est utilisé pour filmer des événements sportifs dans
des stades. Ici le câble utilisé est relativement lourd et
la longueur de câble entre ![]() et
et ![]() est toujours importante, ce
qui permet de garantir la tension au niveau du tambour.
est toujours importante, ce
qui permet de garantir la tension au niveau du tambour.
Dans ces treuils le tambour contient un guide en spirale et un mécanisme qui assure que le câble est toujours en face de la partie libre de la spirale (figure 8)
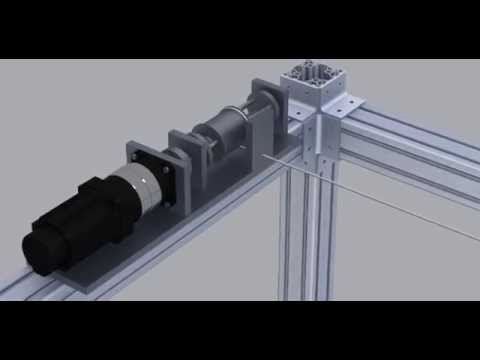
Ce principe est illustré sur la vidéo suivante. Le moteur (en noir) fait tourner le tambour. Le câble (en rouge) s'enroule sur le tambour le long de la spirale et le mécanisme en dessous du tambour se déplace pour être toujours aligné avec le câble. Il renvoit le câble vers une poulie fixe (en vert, à droite) qui renvoit le câble vers la charge (en bleu). A noter que l'on a réduit le changement de longueur du câble pour rendre visible à la fois la charge et le mécanisme.
Par principe on ne peut avoir qu'une couche dans ce type de treuil mais un tour de tambour correspond toujours à la même variation de longueur du câble. Modulo que le câble s'enroule effectivement sur la spirale (et donc que sa tension est suffisante) la mesure de la rotation du tambour donne une information très précise sur la longueur du câble disponible entre la sortie du tambour et la charge. Si on reprend l'exemple ci-dessus avec un rayon de la spirale de 1.5 cm et un pas de 4mm on pourra effectuer 15 tours de tambour et la longueur du câble sera de 1.415 mètres. On voit ainsi que l'on obtient une possibilité faible de variation de longueur. Une solution est d'augmenter le rayon du tambour. Si on le passe au diamètres des flasques de l'exemple précédent, 6.5 cm, on obtient alors une longueur de câble de 5.65 mètres. Pour retomber sur les 86.52 mètres de l'exemple précédent il faudrait alors que le tambour fasse 91.8cm de longueur. Ces treuils seront donc réservés à des robots de taille moyenne.
Un treuil de ce type peut être fabriqué en impression 3D comme nous l'avons fait pour certain de nos MARIONET-SCHOOL (figure 9). Ici le moteur fait tourner a la fois le tambour mais une vis sans fin du même pas que la spirale sur le tambour qui fait translater le tambour. Ainsi pendant que le câble s'enroule sur le tambour le point de sortie du câble ne bouge pas: il suffit alors d'avoir un oeillet pour renvoyer le câble vers la charge.
Un point essentiel de fonctionnement de ce type de treuil est de s'assurer qu'il y a toujours une tension au niveau du tambour pour que le câble s'enroule sur la spirale. Une faible tension peut conduire le câble à sortir de la spirale, causant un dysfonctionnement du système.
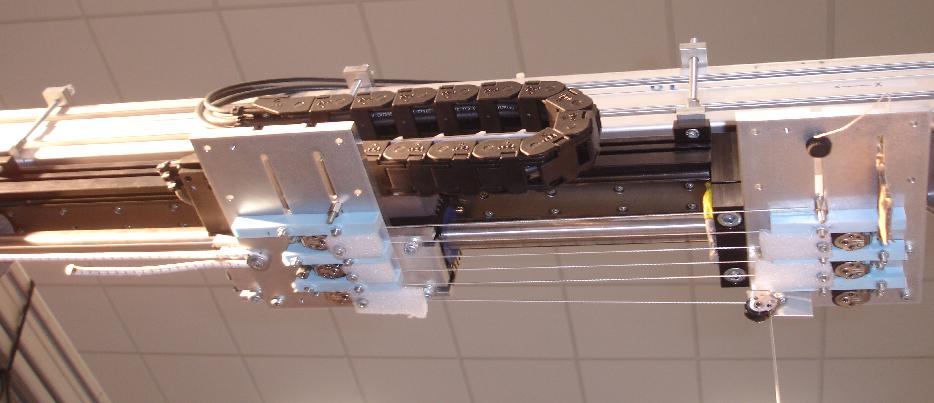
Plutôt qu'utiliser un moteur rotatif et un mécanisme qui transforme ce mouvement en un mouvement du câble selon son axe on peut utiliser directement un actionneur qui bouge un chariot le long d'un axe: c'est un moteur linéaire. Le principe est illustré sur la figure (10). Comme sur un bateau le câble passe par un système de poulies localisées sur le chariot qui fait que le mouvement du câble est un multiple de celui du chariot.
La vidéo suivante illustre le principe. Le moteur linéaire (en noir) déplace un chariot guidé par deux barres (en bleu). Le câble (en rouge) est accroché à un point fixe du moteur (en bas), passe sur une première poulie sur le chariot (en vert) qui le renvoit vers une poulie sur le moteur. Il se dirige alors vers une deuxième poulie sur le chariot qui le renvoit sur une poulie fixe et part ensuite vers la charge.
Dans le cas de la figure la vitesse maximale du chariot est 10 m/s et le système de poulie amplifie le mouvement par un facteur qui aller jusqu'à 10, ce qui fait que la vitesse du câble est de 100m/s. Le mouvement du chariot est limité à 40cm mais avec les poulies la variation de longueur du câble est de 4 mètres (on peut donc utiliser ce système pour des petits à moyen CDPR). C'est le type de treuil que nous avons utilisé pour MARIONET-REHAB et MARIONET-VR mais qui est aussi utilisé pour déplacer les ascenseurs de la Tour Eiffel, avec le déplacement du chariot assuré par un vérin hydraulique.
Un câble réel possède plusieurs caractéristiques:
Ce sont les câbles qui ont été utilisés pour les premiers CDPR (figure 6). Ils sont peu élastiques et ont des limites de tension élevées. Toutefois à force d'être enroulé en rond sur le tambour, le câble à tendance à perdre sa forme droite et à faire des boucles comme un ressort. Si le câble casse il peut alors revenir violemment à sa longueur initiale (effet de lasso) ce qui est très dangereux.
Ce sont les câbles les plus utilisés maintenant. On peut distinguer:
Pour des petits CDPR de démonstration on peut placer les treuils au sommet de pieds télescopiques d'appareil photo (ce que nous faisons pour les MARIONET-SCHOOL). On peut aussi fixer les treuils au plafond ce qui permet d'avoir un robot qui peut couvrir, par exemple, une salle de classe.
Pour les CDPR plus imposants on peut utiliser comme mât des structures en aluminium utilisées dans l'événementiel comme nous l'avons fait pour notre prototype MARIONET-3D (figure 11).


|
L'inconvénient de la solution poulie est que le point de sortie du câble change selon la position de la charge, ce qui va influencer la longueur du câble pour atteindre une position donnée et rend bien plus complexe le calcul des longueurs de câble. Toutefois si le rayon de la poulie est faible cette influence peut être négligée pour un CDPR de démonstration.
Pour utiliser un CDPR nous avons un premier besoin qui est de pouvoir
disposer de moteurs pour les treuils et de pouvoir les
faire tourner. Les moteurs ne sont pas un problème car il en existe
une très large gamme et à des coûts très divers. Pour faire
tourner les moteurs il existe depuis
un certain temps des systèmes sur étagère qui sont dédiés
à ce type de tâche. Les plus économiques sont du type Arduino
à très bas coût mais un peu fragile. Pour la plupart de nos
prototypes nous avons utilisé des Phidgets, un matériel un peu plus
coûteux mais plus fiable. Ce matériel permettra juste d'envoyer
des ordres vers les moteurs, ordres qu'il faudra élaborer et c'est
le comment de cette élaboration que nous allons aborder en détail dans la
section 5.
Mais on peut anticiper sur cette élaboration en admettant qu'on a
déterminé qu'elle devait être les longueurs des câbles pour que
![]() atteigne une position donnée. Le système de commande doit
alors arrêter le moteur lorsque le câble atteint cette longueur,
ce qui impose de pouvoir l'estimer, donc être capable d'évaluer la
longueur courante des câbles.
atteigne une position donnée. Le système de commande doit
alors arrêter le moteur lorsque le câble atteint cette longueur,
ce qui impose de pouvoir l'estimer, donc être capable d'évaluer la
longueur courante des câbles.
La plupart du temps l'estimation de la longueur des câbles va reposer sur la mesure de la rotation du moteur et donc du tambour. Pour les treuils simples et les CDPR de petite dimensions avec des câbles fins on peut se contenter d'utiliser une valeur constante pour le rayon du tambour. Il devient alors facile de calculer qu'elle doit être la rotation du moteur pour que le câble ait une longueur donnée (moyennant l'étape de calibration que nous mentionnerons dans la section 5.2). Il faut toutefois être conscient que la vrai longueur du câble va s'écarter de la valeur calculée assez rapidement et de plusieurs centimètres et que cet écart va augmenter avec le temps de fonctionnement.
Si les variations de longueur des câbles est importante la mesure ne sera pas précise puisque pour la même rotation mesurée la variation de la longueur de câble dépend du nombre de couche sur le tambour. Différentes méthodes pour pallier à cette inconvénient seront présentés dans la section 8.
Pour les treuils à tambour spirale, modulo que le câble s'enroule correctement sur la spirale, cette mesure va être plutôt précise.
Rappelons enfin que les codeurs optiques qui servent, en général, à mesurer la rotation du tambour ont l'inconvénient de donner seulement la variation de longueur du câble par rapport à celle qu'il y avait au démarrage du système. Il est donc nécessaire de connaître cette longueur initiale afin de mesurer la longueur du câble. C'est un point que nous aborderons dans la section 5.2.