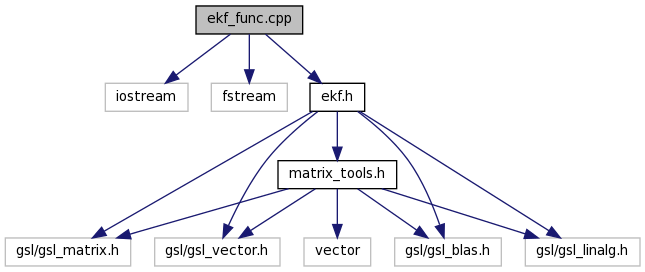
File with functions necessary to perform necessary EKF steps. More...
 Include dependency graph for ekf_func.cpp:
Include dependency graph for ekf_func.cpp:Functions | |
| int | ekf_predict_step (gsl_vector *state_vec, gsl_matrix *P, gsl_matrix *A, gsl_matrix *W, gsl_matrix *Q, gsl_vector *state_vec_pred, gsl_matrix *P_pred) |
| Estimate new state vector using system model. | |
| int | ekf_kalman_gain (gsl_matrix *P_pred, gsl_matrix *H, gsl_matrix *V, gsl_matrix *R, gsl_matrix *K) |
| Calculate Kalman gain. | |
| int | ekf_update_estimate (gsl_vector *state_vec_up, gsl_matrix *K, gsl_vector *mes_vector, gsl_vector *state_vec_pred, gsl_vector *mes_predict) |
| Update state vector estimate using Kalman gain. | |
| int | ekf_update_cov (gsl_matrix *P_up, gsl_matrix *K, gsl_matrix *H, gsl_matrix *P_pred) |
| Update error covariance estimate using Kalman gain. | |
File with functions necessary to perform necessary EKF steps.
| int ekf_kalman_gain | ( | gsl_matrix * | P_pred, |
| gsl_matrix * | H, | ||
| gsl_matrix * | V, | ||
| gsl_matrix * | R, | ||
| gsl_matrix * | K | ||
| ) |
Calculate Kalman gain.
| [in] | P_pred | Estimated error cov |
| [in] | H | measurement jacbian |
| [in] | V | measurement noise jacobian |
| [in] | R | measurement variance matrix |
| [out] | K | Kalman gain |
References gsl_inverse().
Referenced by run_kalman_femur(), run_kalman_femur_theta(), and run_kalman_tib_low_theta().
Here is the call graph for this function: Here is the caller graph for this function:| int ekf_predict_step | ( | gsl_vector * | state_vec, |
| gsl_matrix * | P, | ||
| gsl_matrix * | A, | ||
| gsl_matrix * | W, | ||
| gsl_matrix * | Q, | ||
| gsl_vector * | state_vec_pred, | ||
| gsl_matrix * | P_pred | ||
| ) |
Estimate new state vector using system model.
| [in] | state_vec | Initial state |
| [in] | P | initial state error covariance |
| [in] | A | process matrix |
| [in] | W | process noise jacobian |
| [in] | Q | process noise cov |
| [out] | state_vec_pred | estimated state |
| [out] | P_pred | estimated error covariance |
Referenced by run_kalman_femur(), run_kalman_femur_theta(), and run_kalman_tib_low_theta().
Here is the caller graph for this function:| int ekf_update_cov | ( | gsl_matrix * | P_up, |
| gsl_matrix * | K, | ||
| gsl_matrix * | H, | ||
| gsl_matrix * | P_pred | ||
| ) |
Update error covariance estimate using Kalman gain.
Referenced by run_kalman_femur(), run_kalman_femur_theta(), and run_kalman_tib_low_theta().
Here is the caller graph for this function:| int ekf_update_estimate | ( | gsl_vector * | state_vec_up, |
| gsl_matrix * | K, | ||
| gsl_vector * | mes_vector, | ||
| gsl_vector * | state_vec_pred, | ||
| gsl_vector * | mes_predict | ||
| ) |
Update state vector estimate using Kalman gain.
Referenced by run_kalman_femur(), run_kalman_femur_theta(), and run_kalman_tib_low_theta().
Here is the caller graph for this function: 1.7.4
1.7.4