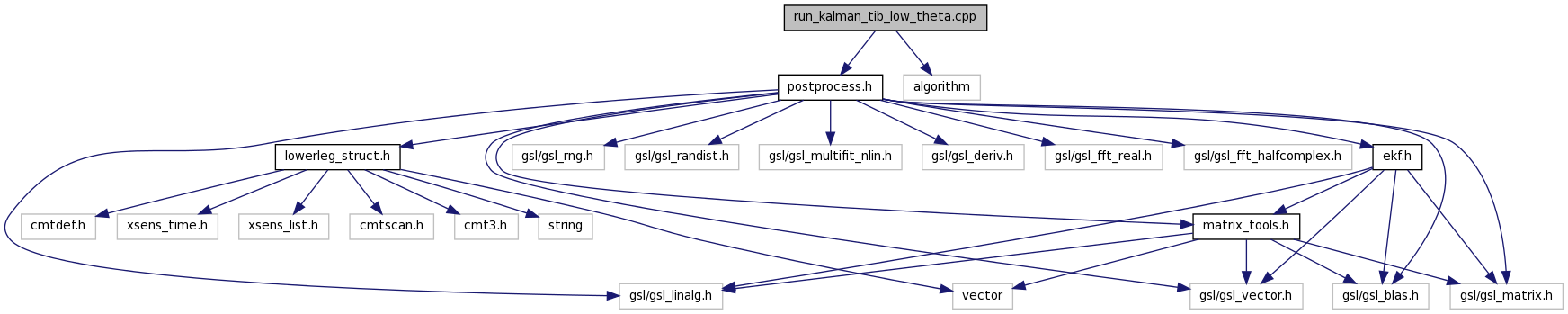
File containing funtions to implement kalman filter on tibia lower collar to get theta angles. More...
 Include dependency graph for run_kalman_tib_low_theta.cpp:
Include dependency graph for run_kalman_tib_low_theta.cpp:Functions | |
| int | set_mes_err_cov_tib (gsl_matrix *R, femur fem, int frame_count) |
| double | get_cov_err_tib (int i, double err[]) |
| int | run_kalman_tib_low_theta (tibia &tib, vector< vector< double > > &state) |
| Run the EKF on the femur. | |
File containing funtions to implement kalman filter on tibia lower collar to get theta angles.
| double get_cov_err_tib | ( | int | i, |
| double | err[] | ||
| ) |
| int run_kalman_tib_low_theta | ( | tibia & | tib, |
| vector< vector< double > > & | state | ||
| ) |
Run the EKF on the femur.
| [in] | fem | The femur structure with all data |
| [out] | state | The state vector, for each iteration. Output of the kalman filter |
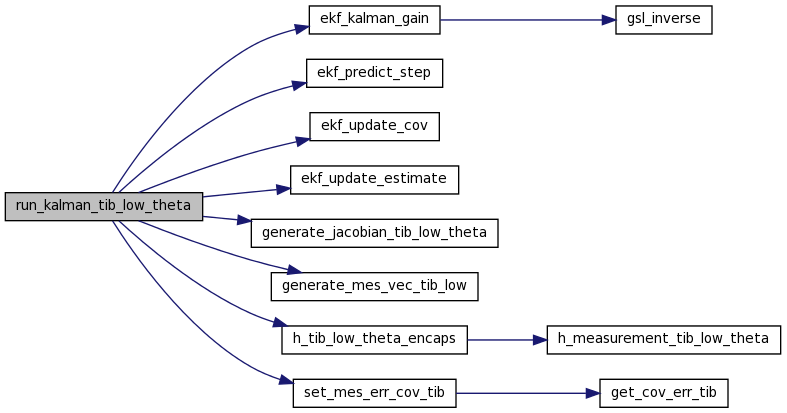
References ekf_kalman_gain(), ekf_predict_step(), ekf_update_cov(), ekf_update_estimate(), generate_jacobian_tib_low_theta(), generate_mes_vec_tib_low(), h_tib_low_theta_encaps(), sensor::mdata, tibia::opti_count, tibia::optical, and set_mes_err_cov_tib().
Here is the call graph for this function:| int set_mes_err_cov_tib | ( | gsl_matrix * | R, |
| femur | fem, | ||
| int | frame_count | ||
| ) |
References get_cov_err_tib(), tibia::opti_count, tibia::optical, and sensor::point_flag.
Referenced by run_kalman_tib_low_theta().
Here is the call graph for this function: Here is the caller graph for this function: 1.7.4
1.7.4