Function to convert coordinates of all points in tib structure on given collar to co-ordinates in frame fixed to left-most link of the collar. More...
#include <stdlib.h>#include <stdio.h>#include <math.h>#include <vector>#include "lowerleg_func.h"#include "postprocess.h" Include dependency graph for calc_points_in_base.cpp:
Include dependency graph for calc_points_in_base.cpp:Functions | |
| int | calc_pts_in_collar_base_frame (tibia &tib, collar &col, vector< vector< double > > &Hprev, vector< vector< double > > &Pvals, vector< vector< double > > &qvals, vector< double > &firstlink) |
| Calculate the position of all relevant points of given collar in collar frame, i.e convert from link co-ordinates to collar co-ordinates. | |
Function to convert coordinates of all points in tib structure on given collar to co-ordinates in frame fixed to left-most link of the collar.
| int calc_pts_in_collar_base_frame | ( | tibia & | tib, |
| collar & | col, | ||
| vector< vector< double > > & | Hprev, | ||
| vector< vector< double > > & | Pvals, | ||
| vector< vector< double > > & | qvals, | ||
| vector< double > & | firstlink | ||
| ) |
Calculate the position of all relevant points of given collar in collar frame, i.e convert from link co-ordinates to collar co-ordinates.
The program will take the co-ordinates of points defined in tibia/collar structure (read from config file) and convert them to co-ordinates in the collar frame, attached to the leftmost link. The results are over-written into the tibia structure.
References tibia::accelerometers, tibia::accl_count, tibia::act_wire_count, tibia::active_wires, calc_transf_matrix(), tibia::col_LINKs, tibia::force_count, tibia::force_sensors, tibia::free_count, tibia::free_sensors, get_link_number(), gsl_matrixprod(), gsl_matrixvecprod(), gsl_vector2double(), LINK::label, sensor::LINK_label, collar_info::LINK_labels, collar::nb_LINKs, tibia::opt_col_count, tibia::opt_col_data, tibia::opti_count, tibia::optical, collar_info::P1, LINK::P1, collar_info::P2, LINK::P2, LINK::P3, LINK::P4, tibia::pass_wire_count, tibia::passive_wires, sensor::rot_matrix, sensor::xa, sensor::ya, and sensor::za.
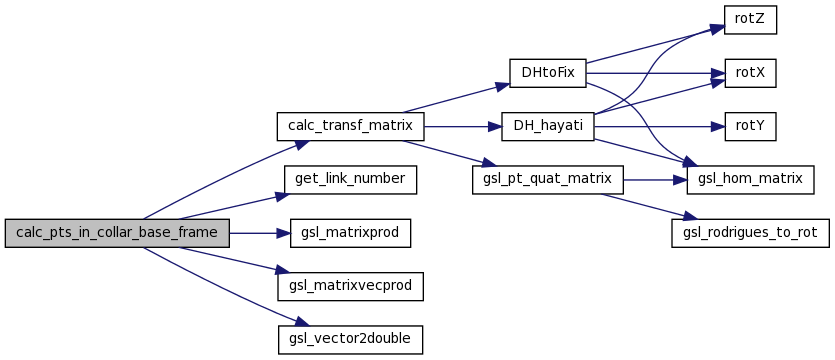
Here is the call graph for this function: 1.7.4
1.7.4