#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <sys/ioctl.h>#include <fcntl.h>#include <signal.h>#include <curses.h>#include <string>#include <time.h>#include <vector>#include <gsl/gsl_matrix.h>#include <gsl/gsl_vector.h>#include <gsl/gsl_blas.h>#include <gsl/gsl_linalg.h>#include <gsl/gsl_rng.h>#include <gsl/gsl_randist.h>#include <gsl/gsl_multifit_nlin.h>#include <gsl/gsl_deriv.h>#include <math.h>#include "postprocess.h"#include "lowerleg_struct.h"#include "lowerleg_func.h"#include "foot-pressure.h" Include dependency graph for accls_relations.cpp:
Include dependency graph for accls_relations.cpp:Functions | |
| int | main (int argc, char *argv[]) |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
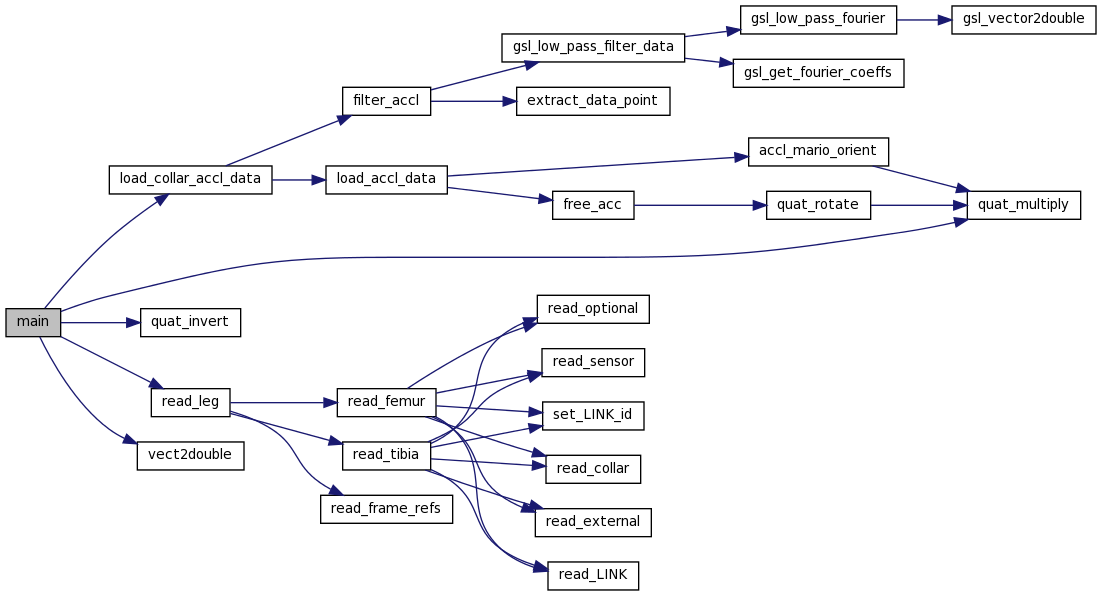
References tibia::accelerometers, load_collar_accl_data(), sensor::mdata, quat_invert(), quat_multiply(), read_leg(), and vect2double().
Here is the call graph for this function: 1.7.4
1.7.4