

Laurent Blanchet
| 2014 |
Interference detection for Cable-Driven Parallel RobotsAuthors: Laurent Blanchet, Jean-Pierre Merlet Publication in: Advanced Intelligent Mechatronics (AIM), 2014 IEEE/ASME International Conference |
| 2009 |
Combining Haptic Sensing with Safe InteractionAuthors: Martin Battaglia, Laurent Blanchet, Abderrahmane Kheddar, Suuji Kajita and Kazuhito Yokoi Publication in: Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference |
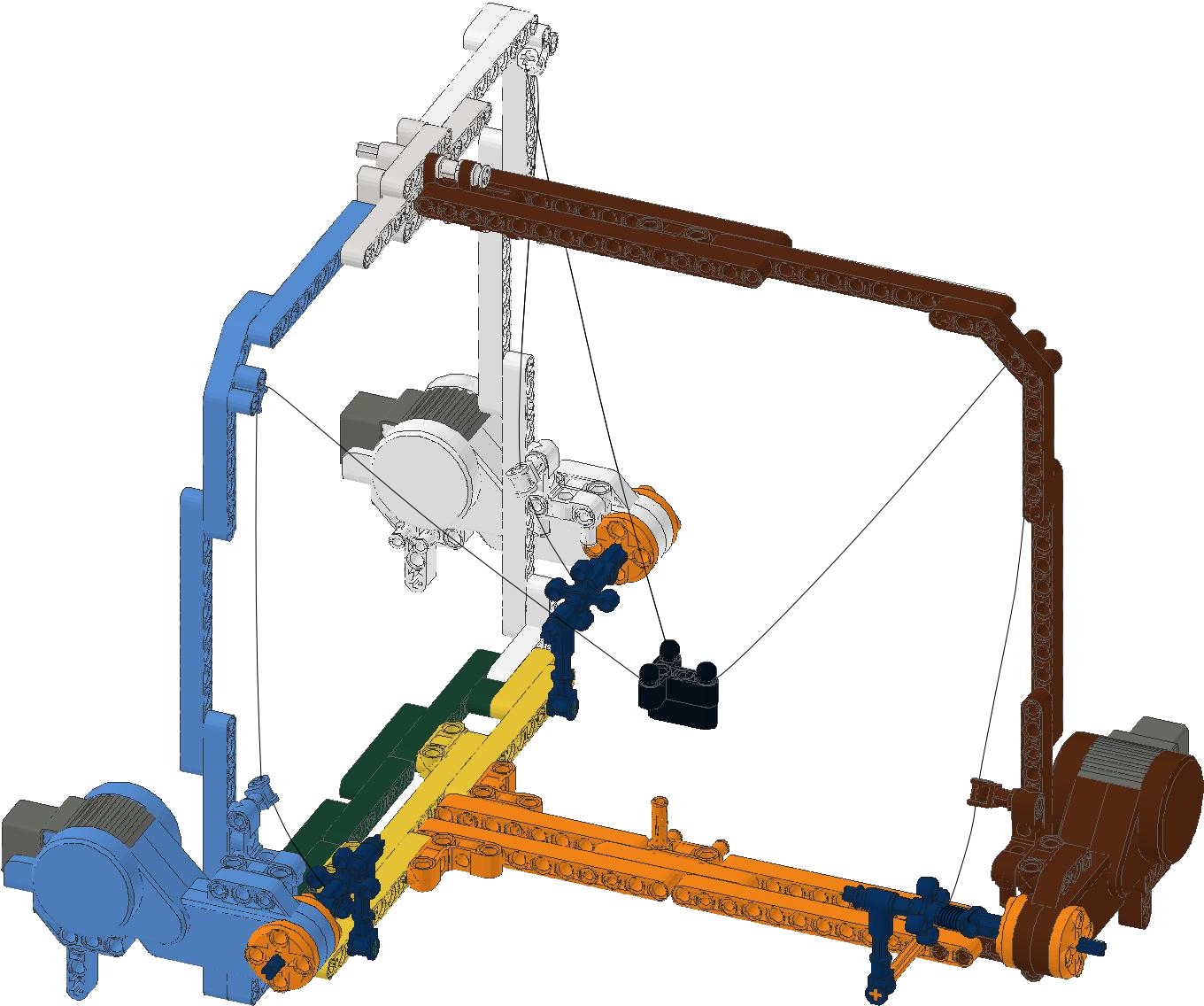 CAD model, click to get the building guide.
CAD model, click to get the building guide.
For educational purposes, a LEGO mock-up has been designed and built in the COPRIN team. I created a building guide in the hopes it brings this mock-up WDPR in everybody's reach, specially young children as it's more or less the indented audience.
 This work is licensed under a CC Attribution-Non-Commercial-ShareAlike 3.0 France License.
This work is licensed under a CC Attribution-Non-Commercial-ShareAlike 3.0 France License.
This code may have errors. Don't use for critical systems.
All of this content is .
 , licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
CSS
, licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
CSS
