
Laurent Blanchet
Laurent Blanchet
Within the frame of the European project CableBot, we aim at designing WDPRs of a huge dimensions, as some envisioned tasks require workspaces as large as 80m x 80m x 25m. Those robots are composed of a mobile platform suspended by m wires to a base. Controlling the length of the wires controls the position of the mobile (see fig. 1).
Fig. 1: Schematic of an underconstrainted WDPR with its parameters.
One characteristic of the applications envisioned in the CableBot project is a wide workspace. This matter is handled by having modular WDPR, meaning it will be possible to modify the position of the attachments of the wires. On the artist's view Fig. 2 one can see a concept (credits picture: Dinh Quan Nguyen, LIRMM) where the attachments positions are the nodes of a grid. Thus, it is possible to have a configuration that suits the task at hand.
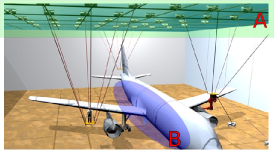
Fig. 2: EADS scenario (credits picture: Dinh Quan Nguyen, LIRMM) with input zones.
I am creating a software that works out the possible solutions for the positions of the attachments points given the task at hand. For example, if the user specify some points, trajectories, or volumes in the blue zone (B) on figure 2 as well as the errors the robots might make (accuracy of the robot), the software will compute if the robot is able to attain every points within the boxes of the points, trajectories, or volumes augmented by the accuracy, and gives back the list of nodes (within in the green zone (A) on figure 2) enabling the robot to succeed.
The use of interval analysis allows me to guaranty that the attachment points found are indeed suitable, even with some error on the grid's making.
In order of measuring the accuracy of my model (Irvine equations) I am currently comparing my model with the data of an experiment created and proceeded by Tecnalia. However I am still modeling the initial conditions of the real experiment.
For educational purposes, a LEGO mock-up has been constructed in the COPRIN team. I have been participating in the construction by making wire pass-through less damaging for the wire, and rigidifying the structure.
I also created a building guide in the hopes it brings this mock-up WDPR in everybody's reach, specially young children as it's more or less the indented audience.
I am currently working on creating a pbLua control program for the NXT brick, as the original block programming software imposes some harsh limitations.

Picture of the educational WDPR in LEGO.
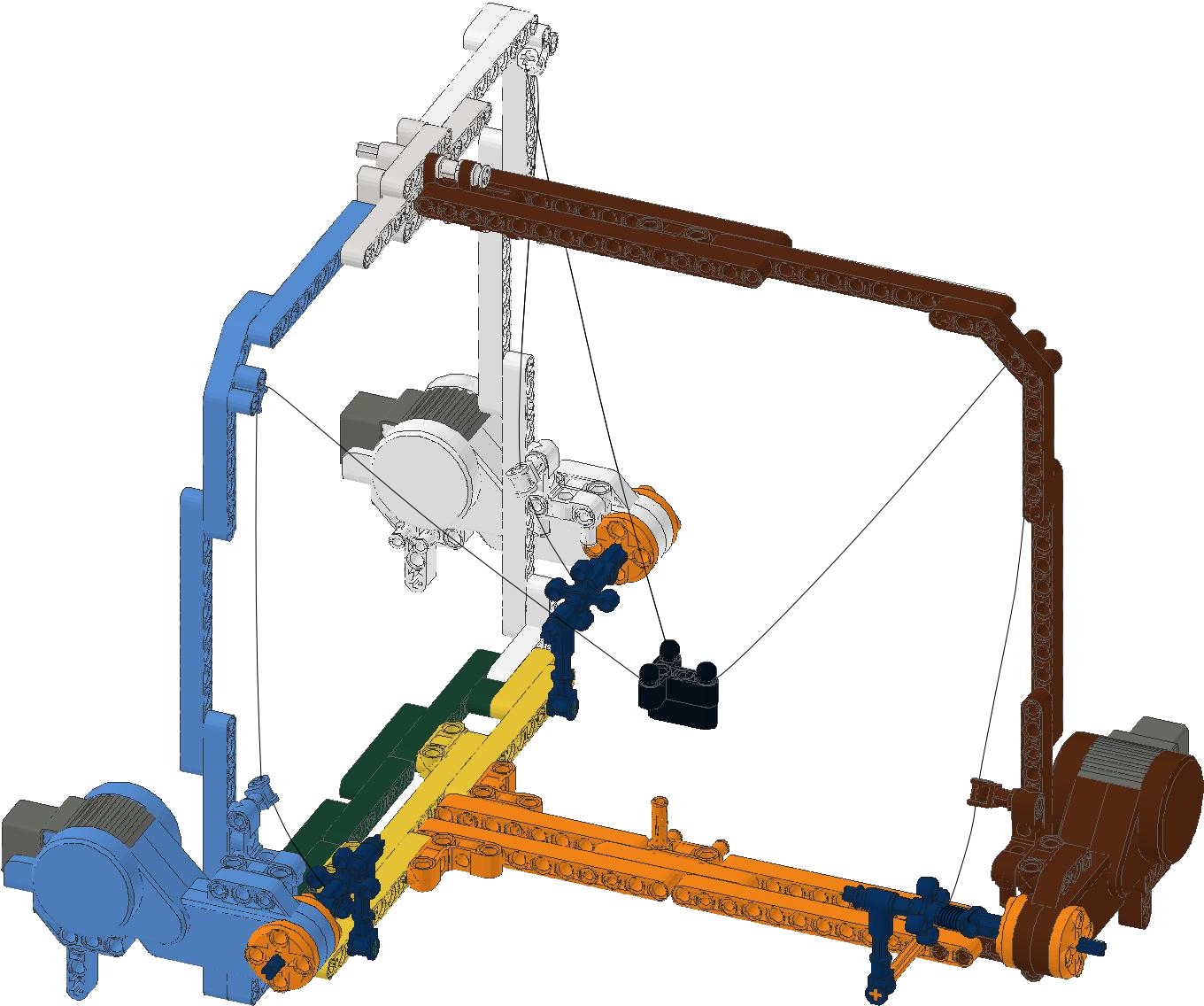
CAD model, building guide available in content section.
 , licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
XHTML
, licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
XHTML
