|
|
I am now a research assistant at the University of Oxford, my new wepage is
http://www.robots.ox.ac.uk/~cmei/,
you should be redirected in 3 seconds.
Copyright
Readers should be aware of some of the issues raised by
the electronic dissemination of published papers.
In particular, readers should know that :
The documents contained in these directories are included by the contributing
authors as a means to ensure timely dissemination of scholarly and technical
work on a non-commercial basis. Copyright and all rights therein are maintained
by the authors and by other copyright holders, notwithstanding that they have offered
their works here electronically. It is understood that all persons copying this
information will adhere to the terms and constraints invoked by each author's copyright.
These works may not be reposted without the explicit permission of the copyright holder.
|
PhD related work :
2007
ICRA
|
|
Single View Point Omnidirectional Camera Calibration from Planar Grids
|
[PDF]
|
@InProceedings{mei07a,
author = {C. Mei and P. Rives},
title = {Single View Point Omnidirectional Camera Calibration from Planar Grids},
bookTitle = {IEEE International Conference on Robotics and Automation},
month = {April},
year = {2007}
note = {To appear}
}
This article is related to the omnidirectional calibration toolbox. It
contains recent improvements since the French version (RFIA 2006).
2006
BMVC
|
|
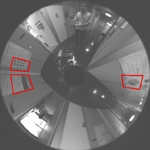
Constrained Multiple Planar Template Tracking for Central Catadioptric Cameras
|
[PDF]
|
@InProceedings{mei06e,
author = {C. Mei and S. Benhimane and E. Malis and P. Rives},
title = {Constrained Multiple Planar Template Tracking for Central Catadioptric Cameras},
bookTitle = {BMVC},
month = {September},
year = {2006}
}
A sequence with planes tracked jointly with an omnidirectional camera can be seen in the videos section.
2006
IROS
|
|
Homography-based Tracking for Central Catadioptric Cameras
|
[PDF]
|
@InProceedings{mei06d,
author = {C. Mei and S. Benhimane and E. Malis and P. Rives},
title = {Homography-based Tracking for Central Catadioptric Cameras},
bookTitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
month = {October},
year = {2006}
}
A sequence with planes tracked with an omnidirectional camera can be seen in the videos section.
2006
IROS
|
|
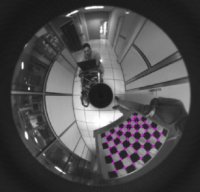
Fast central catadioptric line extraction, estimation,
tracking and structure from motion
|
[PDF]
|
@InProceedings{mei06c,
author = {C. Mei and E. Malis},
title = {Fast central catadioptric line extraction, estimation,
tracking and structure from motion},
bookTitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
month = {October},
year = {2006}
}
A sequence with tracked line images can be seen in videos.
2006
ICRA
|

|
Calibration between a Central Catadioptric Camera and a
Laser Range Finder for Robotic Applications
|
[PDF]
|
@InProceedings{mei06b,
author = {C. Mei and P. Rives},
title = {Calibration between a Central Catadioptric Camera and a
Laser Range Finder for Robotic Applications},
bookTitle = {IEEE International Conference on Robotics and Automation},
month = {May},
year = {2006}
}
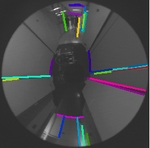
In videos, you can see a sequence where the laser points
are reprojected on the images to validate visually the calibration.
2006
RFIA
|
|
Calibrage non biaise d'un capteur central catadioptrique
|
[PDF]
|
@InProceedings{mei06a,
author = {C. Mei and P. Rives},
title = {Calibrage non biaise d'un capteur central catadioptrique},
bookTitle = {RFIA},
month = {January},
year = {2006}
}
This article is related to the omnidirectional calibration toolbox. An English
version with recent advances included in the Improved Calibration Toolbox has been published since (ICRA 2007).
|
Article published during my Master Thesis :
2004
ISPRS
|
|
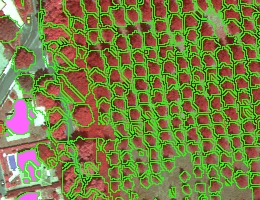
Tree Crown Delineation from Digital
Elevation Models and High Resolution Imagery
|
[PDF]
|
|
@InProceedings{mei04,
author = {Mei, C. and Durrieu, S.},
title = {Tree Crown Delineation from Digital Elevation Models
and High Resolution Imagery},
booktitle = {ISPRS working group VIII/2, Laser-Scanners for
Forest and Landscape Assessment},
year = {2004},
volume = {36},
month = {October}
}
|
|