Christopher Mei
PhD Student
Central Catadioptric Systems
And
SLAM
And
SLAM
|
|
Christopher Mei
PhD Student
|
Central Catadioptric Systems
And SLAM |
|

Christmas TrackingorHow to build a Catadioptric sensor for less than 25 Euros ! I'm sure during your Christmas shopping you have been thinking "Wouldn't an omnidirectional camera make a wonderful present !" But they are so expensive ! Or maybe not, here is a recipe to make a cheap sensor good enough for tracking ! Ingredients :
TIP : Be careful to use a "good-quality" ball that isn't made of two separate half-spheres... 
Method :



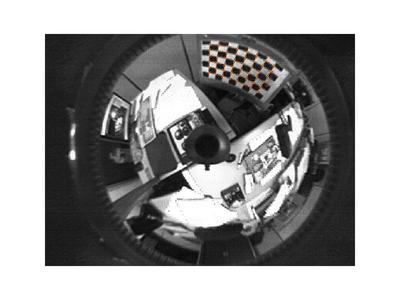
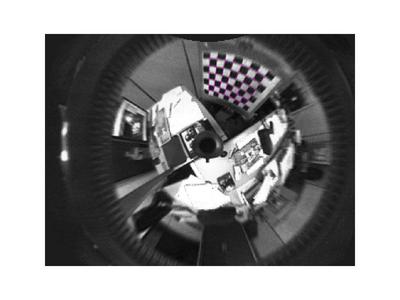
Doesn't look bad ! (I like the way the camera seems to hover in mid-air) But can we actually do anything with it ? First of all we will have to calibrate our new sensor... Calibration : The calibration toolbox is not adapted to non-central catadioptric sensors in theory and to calibrate it I used a version of the toolbox that is not yet online and calculates the mirror parameters (I will soon put it on the Web). However, the calibration showed that a parabolic model gave the best projective results so the toolbox currently online should work. To adapt to the sphere's projective model and the poor quality of the webcam, the model seems to "use" the radial distortion parameters. This made the point extraction process on the grid hazardous but with a lot of "Calibration/Analyse Error/Recomp. Corners" cycles a pretty impressive accuracy was obtained (using two radial distortion parameters) : the error in pixels was of 0.168 in x and 0.153 in y! Here are a few images with their undistorted versions :
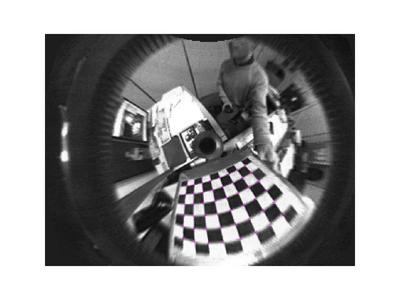
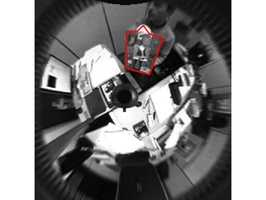
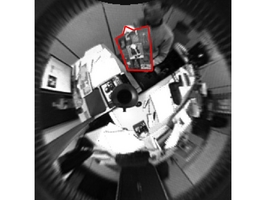
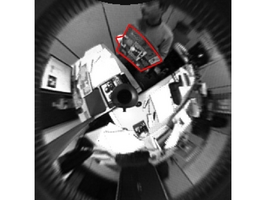
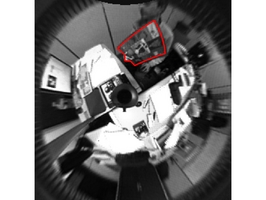
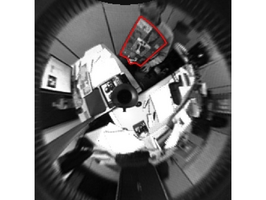
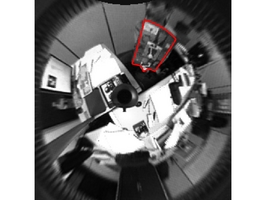
(Here are the images if you would like to try out the calibration) Tracking : And the sensor is sufficiently good to track Father Christmas (or Santa Claus ;-) ! Here are a few images of a tracking sequence :
You can have a look at a short video of the tracking here.
Happy Christmas !
|