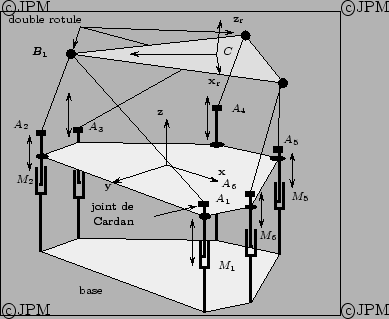
Un poignet actif à 6 degrés de liberté
dont les
articulations près de la base se déplacent selon la verticale
en utilisant une chaîne de type

(brevet INRIA). Les segments ont une longueur fixe,
les moteurs sont en partie basse [
122].
An active wrist, patent of INRIA. The universal joints close to
the base of the fixed length legs moves along a vertical axis
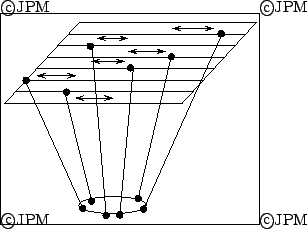
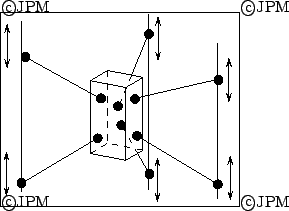
Ce type de structure peut se décliner de diverses manières.
This type of structure can be derived in various variants.
Le robot "Hexaglide" de l'École Polytechnique
fédérale de
Zürich. Les axes des articulations prismatiques sont
horizontaux et parallèles.
The "Hexaglide" robot of the EPFH, Zürich.
The universal joints close to
the base of the fixed length legs moves along a horizontal parallel axis