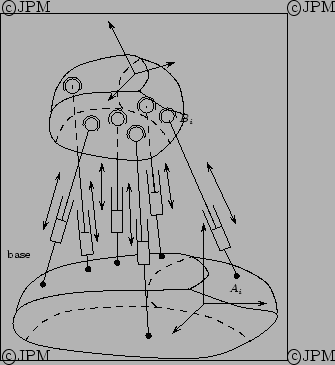
La structure générale d'un manipulateur parallèle à 6 degrés de liberté
avec des chaînes de type

. La plate-forme est reliée à la base
par 6 segments. La liaison d'un segment avec la base se fait usuellement
avec un joint de Cardan et la liaison avec la plate-forme mobile par une
rotule. Un actionneur prismatique permet de faire varier la longueur des
segments.
General structure of a 6 dof robot with 6 identical

chains.
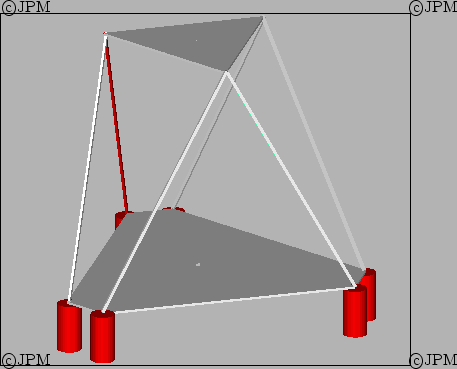
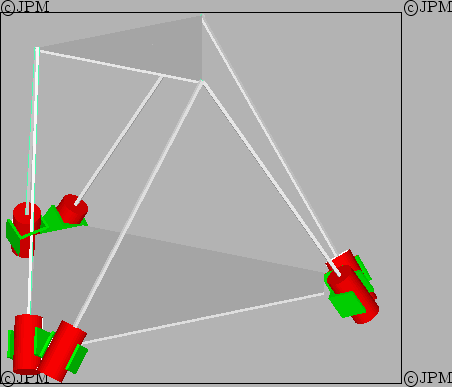
Le prototype du Pr. Mac Callion: les moteurs
entraînent en rotation les vis sans fin par l'intermédiaire d'un joint
de Cardan, ce qui fait varier la longueur des segments , d'après
MacCallion [
116].