
Laurent Blanchet
Laurent Blanchet
I am currently a PhD candidate at INRIA Sophia Antipolis. I am being supervised by Jean-Pierre Merlet in the COPRIN team.
Mechanics, Process mechanics, Robotics (design and control). See my curriculum vitae for more details or the previous projects section for applied work.
The project CableBot was created to develop of a new generation of modular and reconfigurable robotic devices that are capable to perform many different steps in the life-cycle stages of large-scale structures. Because of its industrial purpose, requirements typical of a parallel robot are expected, meaning precision, heavy loads and security. The robotic device is thus a large scale parallel robot using wires as legs.
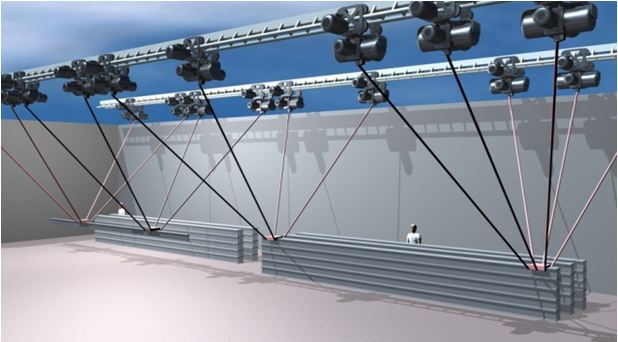
ACCIONA scenario (credits picture: Dinh Quan Nguyen, LIRMM).
To overcome the disadvantage of parallel robot, the reduced workspace, those WDPR have the particularity to be modular. This means that one may be able to change the configuration of the robot to suit the application envisonned. Even more so is the possibility to change the workspace within the same application, once a task is done or even online while the robots is operating.
However, the model's parameters values must meet manufacturing and assembling tolerances. Indeed, we give a guaranty on the robot's performances which must be robust in front of variations of the parameters within the said tolerances. The use of interval analysis allows to certify the dimensional design and results in an approximation of all possible values for each parameter instead of a single value, giving room for design solutions with trades-off on performances not specified in the scope statement.
| |
|
|
| |
 |
|
| |
|
 |
 , licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
XHTML
, licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 France License by INRIA and/or Laurent Blanchet |
Designed by Free CSS Templates & LB |
Validate
XHTML
