INRIA home page
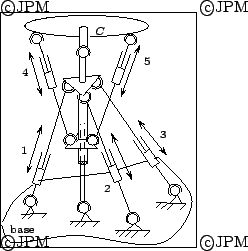
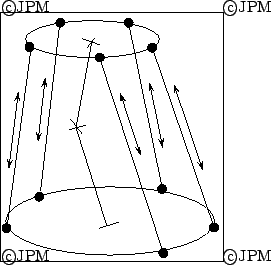
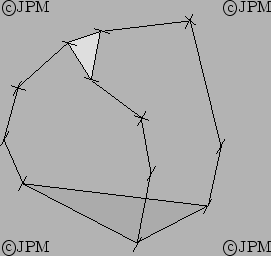
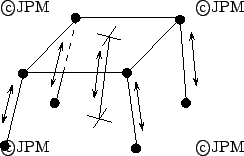
Le manipulateur à 5 degrés de liberté de Austad. Un premier
positionneur parallèle, utilisant les actionneurs
1, 2, 3, place le point

dans l'espace et un deuxième
mécanisme parallèle, utilisant les actionneurs 4, 5
permet d'assurer deux rotations du plateau mobile, d'après
Austad [
9].
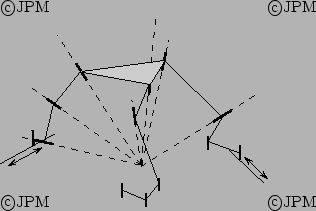
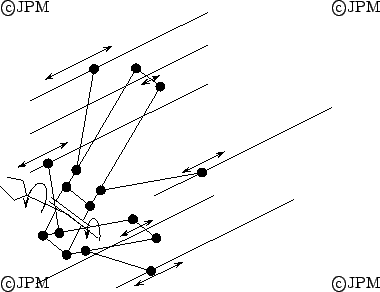
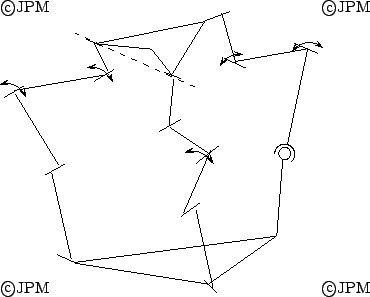
Un robot proposé par Zamanov. Le sixième
degré de liberté, la rotation autour de la normale au plateau mobile,
est obtenue par un mécanisme supplémentaire, d'après Zamanov [
183].
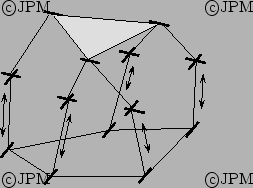
Un robot proposé par Stocco et Salcudean, d'après Stocco [
163].
Un robot à 5 d.d.l avec une contrainte passive: le bras central
permet toutes les translations mais le joint de Cardan à
son extrémité empêche une rotation. Il s'agit donc d'un
3T2R [
177].
A 5 d.o.f. robot with passive constraints: the central arm allow any
translation but prohibit a rotation
Un autre exemple de robot à 5 d.d.l avec contrainte passive de type
3T-2R [
185]
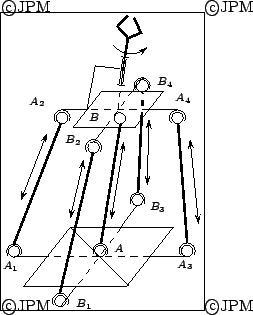
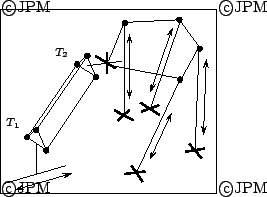
Une autre possibilité est qu'une des jambes empêche un degré de
liberté de la platforme. Ici un mécanisme de type 3-UU impose que
le trangle

reste toujours parallèle au triangle

, avec la
même orientation. Le
triangle

a donc 3 degrés de liberté en translation. Comme il
est connecté à la plate-forme par un joint de cardan la rotation
de la plate-forme autour de l'axe perpendiculaire aux 2 axes du Cardan
est impossible [
49].
Here one of the leg prohibit one rotational dof of the platform. A
3-UU mechanism impose that

is always parallel to

with the
same orientation.

has only 3 dof in translation. As it is
connected to the platform with a U joint the platform cannot rotate
around the axis that is perpendicular to the 2 axis of the U joint.
Une autre possibilité de contraindre un degré de liberté de la
plate-forme. Ici une jambe empêche une rotation de la
plate-forme [
69]
Here a leg prohibits a rotation of the platform
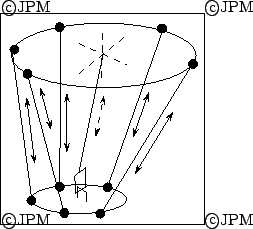
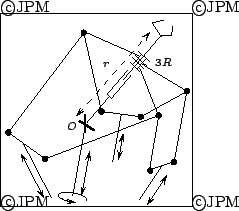
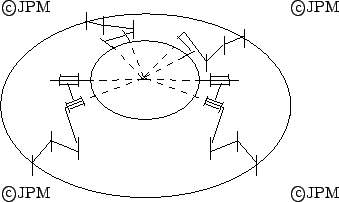
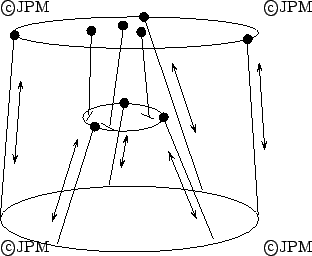
Dans ce robot nous avons 3 articulations rotoïdes coincidentes
(3R). Les degrés de liberté sont les 3 rotations autour de O,
l'altitude z de O et la longueur r entre 0 et l'organe
terminal [
192]
For this robot the 5 d.o.f are the 3 rotations around O, the altitude
of O and the distance r between O and the end-effector
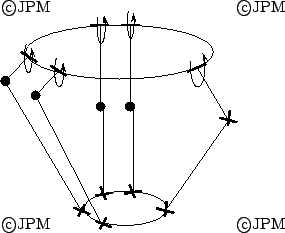
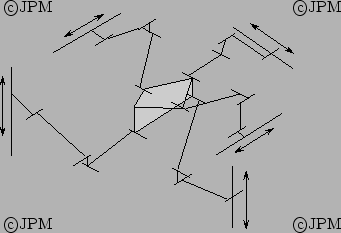
Le robot de Li avec seulement des articulations rotoïdes. Le
degré de liberté impossible est la rotation autour
de la normale de la plate-forme [
103]
A 5 dof robot with only revolute joints. The constrained dof is the
rotation around the normal of the platform
Un autre robot à 5 degré de liberté [
104]
Un robot à 5 degré de liberté de type 5-RPUR [
104]
Seul la rotation autour de la normale à la plate-forme n'est pas
possible.
Only the rotation around the normal to the platform is not possible.
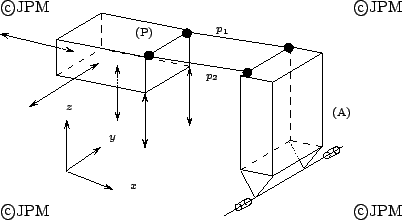
Un robot à 5 ddl: la plate-forme (P) est relié au corps (A) par le
parallélogramme articulé

alors que ce corps ne peut que
tourner autour d'un axe. Il empêche donc la rotation de la
plate-forme autour de l'axe z [
87]
The platform (P) is connected through an articulated parallelogram to
body (A) than can only rotate aroung an axis. The rotation around the
z axis is thus prohibited
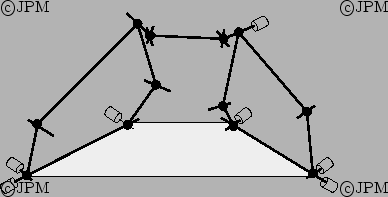
Le robot à 5 d.d.l. EUREKA du LIRMM [
137]. Les
d.d.l. sont les 3 translations et deux rotations.
The EUREKA robot of LIRMM. The 5 d.o.f. are the 3 translations and 2
rotations
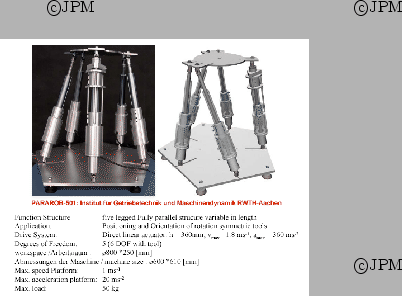
Le robot à 5 d.d.l. PARAROB du RWTH, Aachen. Les
d.d.l. sont les 3 translations et deux rotations [
119].
The PARAROBOT robot of RWTH Aachen. The 5 d.o.f. are the 3 translations and 2
rotations
Le Pentapteron proposé par Gosselin [
53], qui est un
robot de type

. Les R sur la plateforme sont tous
parallèle (direction
u), les R après les P sont aussi tous
parallèles (direction
v). Les axes des R en partant de
l'actionneur ont comme direction
v,
v,
u,
u.
The Pentapteron, a

robot. The directions of the
R joints, starting from the actuator, are
v,
v,
u,
u.
Un robot de type

-RR. Les deux derniers R ont des
axes concourants. Les degrés de liberté sont 3 rotations autour du
point d'intersection et 2 translations horizontales [
188].
A robot with four

-RR chains having 3 rotational
d.o.f and 2 translational d.o.f. in the plane.
Un robot de type 4-SPS 1-UPU [
180]
A 4-SPS 1-UPU robot
Un robot de type

[
135]
Un robot avec une plate-forme intermédiaire. Celle-ci est
connectée au sol par 3 jambes

. L'organe terminal est relié
à la plate-forme intermédiaire par des jambes passives

et au
sol par 3 jambes

[
47].
A robot with an intermediary platform which is connected to the ground
by 3

legs. The end-effector is connected to the intermediary
platform by three passive

legs and to the ground by 3

legs.


 Next: Manipulateurs à 6 degrés de liberté/6 DOF robots
Up: Les robots à mouvements spatiaux/Spatial robots
Previous: Manipulateurs à 4 degrés de liberté/4 DOF robots
Next: Manipulateurs à 6 degrés de liberté/6 DOF robots
Up: Les robots à mouvements spatiaux/Spatial robots
Previous: Manipulateurs à 4 degrés de liberté/4 DOF robots