|
|
 |
Member of Titane
Geometric Modeling of 3D Environment
|
Mohammad Rouhani, PhD
Postdoctoral
Researcher
Titane team, INRIA
Sophia-Antipolis
06420 Nice, France
www.cvpr3D.com
mohammad.rouhani
[at] inria dot fr
Tel:
+33-497155309
|
|
|
|
|
|
|
|
Please refer to the latest version of
my
CV.
I have been working on different
topics of 3D Computer Vision
and Graphics, including
surface reconstruction and
representation, surface and volume
registration, shape matching as well
as modern Machine Learning for
object detection and semantic
segmentation. During my PhD I had the
chance of working with Angel
D. Sappa at Computer Vision
Center. My research skills have been
further elaborated during my Postdoc
opportunities at Imperial College in
London and INRIA Rhone-Alpes in
Grenoble. At the moment I am with
INRIA Nice working with Pierre Alliez
and Florent Lafarge on semantic
segmentation of 3D textured meshes.
The list of topics I have been working
on are listed bellow:
|
|
|
|
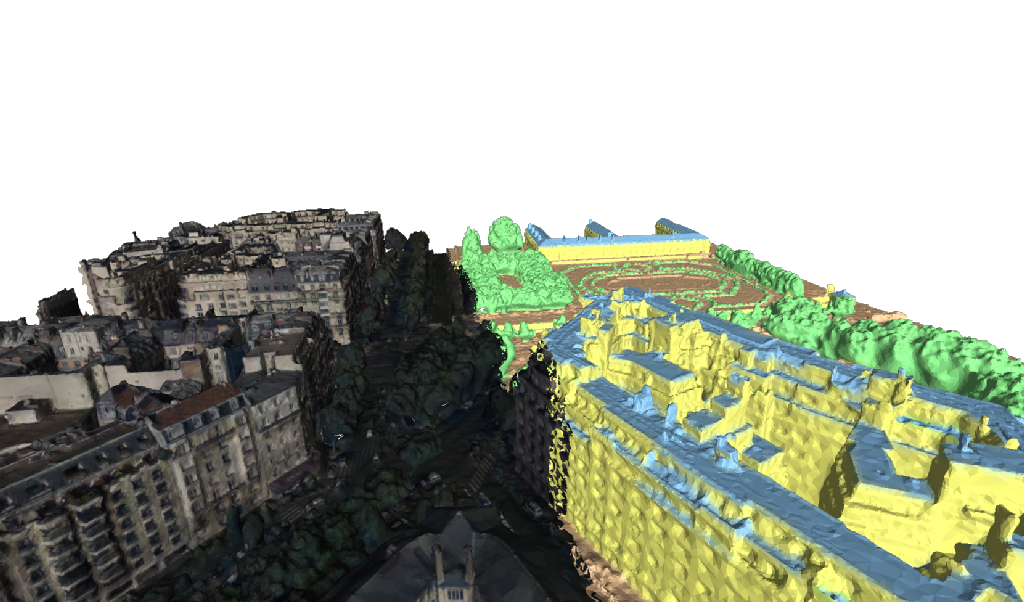
Given a textured mesh (in
*.OBJ) it must be semantically
segmented into pieces with the right
labels. For this purpose a modern
machine learning techniques is
employed on a set of training examples
described by photometric and geometric
features...
|
|

|

|
Volumetric
Shape Matching:
Traditional matching methods are
based on the surface manifold. By
exploiting the volumetric information,
we model the matching as a mass
transportation problem while the cell's
volumes are preserved. The result is
followed by a volumetric deformation
that is more natural for solid
objects.
|
|
|

|
Multi-Class
Object Detection:
Randomized Decision Trees are among
fast and popular tools in machine
learning and computer vision. We use
this tool for multi-class object
detection as well as 3D pose
estimation. The employed random forest
is based on dominant orientation
templates, instead.
|
|
|
 |
Deformation Modeling:
This is a common field of study
between computer vision and graphics.
Deformation modeling concerns
transforming the given image or mesh
so that its basic properties are
preserved during the transformation.
Based on the criteria used as a shape
prior the deformation might be
intrinsic or extrinsic and the
optimization framework may vary
depending on the model. I have a long
experience working with FFD models and
as-rigid-as-possible approaches where
a simple least square can be obtained
to preserve the shape prior.
|
|
|
 |
Non-Rigid
Shape Registration:
The registration distance original
proposed for rigid case is extended
for non-rigid deformation. The
distance is robust to noise and
missing data, hence it shows a good
behavior for non-rigid registration as
well. The deformation space could be
selected as TPS or iFFD or even the
Laplacian Deformation.
|
|
|
 |
2D
and 3D Point Set Alignment:
In this work, we convert the
point-to-point alignment to a
point-to model alignment problem. We
used implicit representation to
describe the model set. Then we
would be able to exploit many
metrics provided by this
representation. As a result the
objective function will be a smooth
function which can be used in many
gradient based optimization
algorithms.
|
|
|

|
Implicit
Curve & Surface Fitting:
We have been working on both
Algebraic and Geometric distances
to fit a given data set in 2D/ 3D.
We employed implicit polynomials
which does not need any
parametrization. At the moment we
are extending the idea to more
general implicit representations
such as implicit B-Splines.
|
|
|
|
(cc) Mohammad
Rouhani 2008-2011 (Last update Jul 2011).
All materials
can be used under Creative
Commons Licence Attribution-Noncommercial 3.0. |
|
|
