Functions to calculate various Rotation matrices. More...
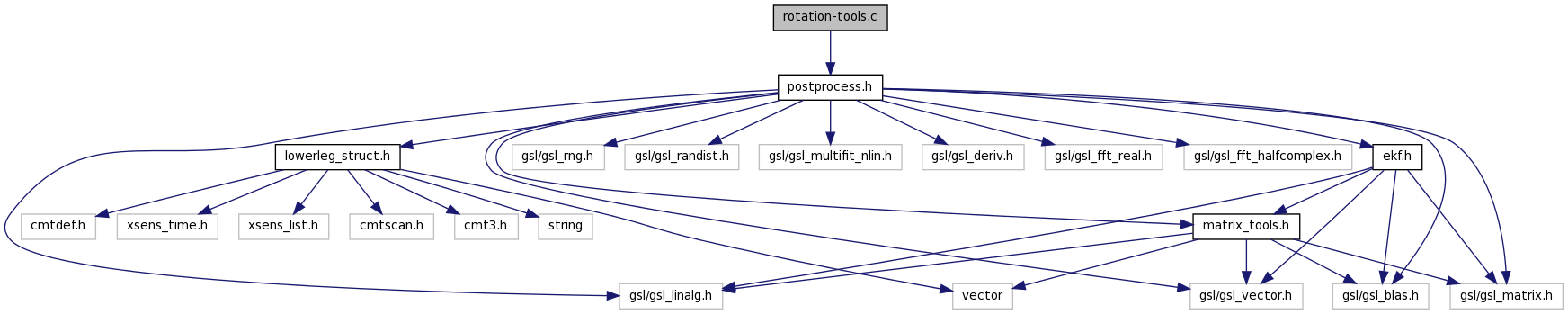
#include "postprocess.h" Include dependency graph for rotation-tools.c: This graph shows which files directly or indirectly include this file:
Include dependency graph for rotation-tools.c: This graph shows which files directly or indirectly include this file:Functions | |
| void | encaps_vector2rot (double *vrot, double *Rot) |
| void | gsl_vector2Rot_matrix (gsl_matrix *Rot, gsl_vector *v) |
| void | gsl_Rot_matrix2vector (gsl_matrix *Rot, gsl_vector *v) |
| void | gsl_rot_to_rodrigues (gsl_matrix *Rot, gsl_vector *rodrig) |
| void | gsl_rodrigues_to_rot (gsl_vector *rodrig, gsl_matrix *Rot) |
| void | gramSchmidt (gsl_vector *v1, gsl_vector *v2, gsl_vector *v3, gsl_matrix *R) |
| void | mat_passage_3pts (gsl_vector *v1, gsl_vector *v2, gsl_vector *v3, gsl_matrix *T) |
| void | rotX (double alpha_rad, gsl_matrix *Rot) |
| Rotation matrix about axis X, angle in radians. | |
| void | rotY (double alpha_rad, gsl_matrix *Rot) |
| Rotation matrix about axis Y, angle in radians. | |
| void | rotZ (double alpha_rad, gsl_matrix *Rot) |
| Rotation matrix about axis Z, angle in radians. | |
| void | rotEuler (double X, double Y, double Z, gsl_matrix *Rot) |
| int | gsl_hom_matrix (gsl_vector *P, gsl_matrix *Rot, gsl_matrix *H) |
| homogeneous transformation matrix | |
Functions to calculate various Rotation matrices.
| void encaps_vector2rot | ( | double * | vrot, |
| double * | Rot | ||
| ) |
References gsl_matrix2double(), and gsl_vector2Rot_matrix().
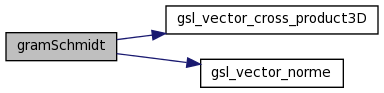
Here is the call graph for this function:| void gramSchmidt | ( | gsl_vector * | v1, |
| gsl_vector * | v2, | ||
| gsl_vector * | v3, | ||
| gsl_matrix * | R | ||
| ) |
Construct matrix such that v2-v1 is x-axis, v3-v2-v1 is the x-y-z plane. R converts local coordinates of frame fixed to v1,v2,v3 to global coords.
References gsl_vector_cross_product3D(), and gsl_vector_norme().
Referenced by calc_trans_mat(), and mat_passage_3pts().
Here is the call graph for this function: Here is the caller graph for this function:| int gsl_hom_matrix | ( | gsl_vector * | P, |
| gsl_matrix * | Rot, | ||
| gsl_matrix * | H | ||
| ) |
homogeneous transformation matrix
Takes in the rotation matrix and translation vector as input and stores the resultant homogeneous transformation matrix in H.
| [in] | P | A vector containing the translation co-ordinates of the transform. Expressed as a 3x1 position vector |
| [in] | Rot | 3x3 Rotation matrix |
| [out] | H | Resultant transformation matrix obtained as H = [R P; 0 0 0 1] |
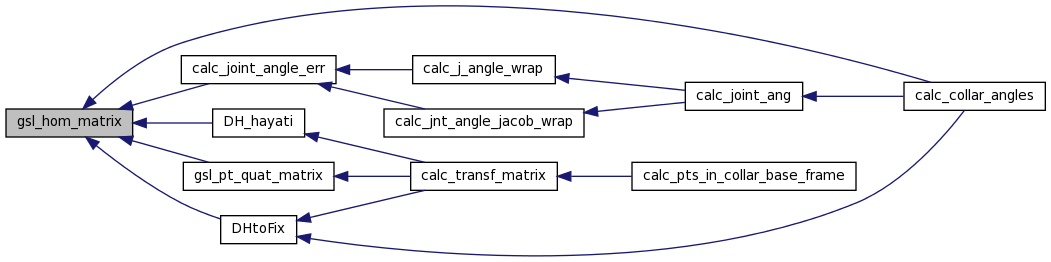
Referenced by calc_collar_angles(), calc_joint_angle_err(), DH_hayati(), DHtoFix(), and gsl_pt_quat_matrix().
Here is the caller graph for this function:| void gsl_rodrigues_to_rot | ( | gsl_vector * | rodrig, |
| gsl_matrix * | Rot | ||
| ) |
Referenced by calc_collar_angles(), and gsl_pt_quat_matrix().
Here is the caller graph for this function:| void gsl_Rot_matrix2vector | ( | gsl_matrix * | Rot, |
| gsl_vector * | v | ||
| ) |
| void gsl_rot_to_rodrigues | ( | gsl_matrix * | Rot, |
| gsl_vector * | rodrig | ||
| ) |
| void gsl_vector2Rot_matrix | ( | gsl_matrix * | Rot, |
| gsl_vector * | v | ||
| ) |
References gsl_vector_norme().
Referenced by encaps_vector2rot().
Here is the call graph for this function: Here is the caller graph for this function:| void mat_passage_3pts | ( | gsl_vector * | v1, |
| gsl_vector * | v2, | ||
| gsl_vector * | v3, | ||
| gsl_matrix * | T | ||
| ) |
| void rotEuler | ( | double | X, |
| double | Y, | ||
| double | Z, | ||
| gsl_matrix * | Rot | ||
| ) |
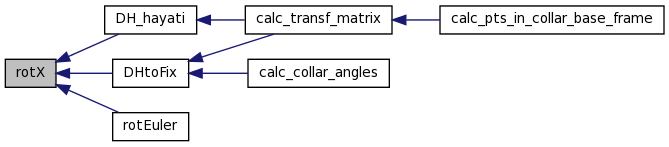
| void rotX | ( | double | alpha_rad, |
| gsl_matrix * | Rot | ||
| ) |
Rotation matrix about axis X, angle in radians.
Referenced by DH_hayati(), DHtoFix(), and rotEuler().
Here is the caller graph for this function:| void rotY | ( | double | alpha_rad, |
| gsl_matrix * | Rot | ||
| ) |
Rotation matrix about axis Y, angle in radians.
Referenced by DH_hayati(), and rotEuler().
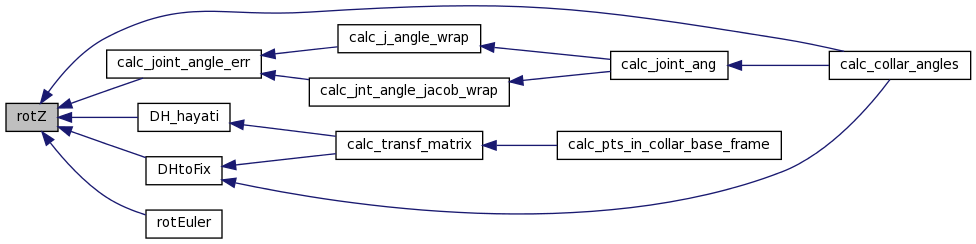
Here is the caller graph for this function:| void rotZ | ( | double | alpha_rad, |
| gsl_matrix * | Rot | ||
| ) |
Rotation matrix about axis Z, angle in radians.
Referenced by calc_collar_angles(), calc_joint_angle_err(), DH_hayati(), DHtoFix(), and rotEuler().
Here is the caller graph for this function: 1.7.4
1.7.4