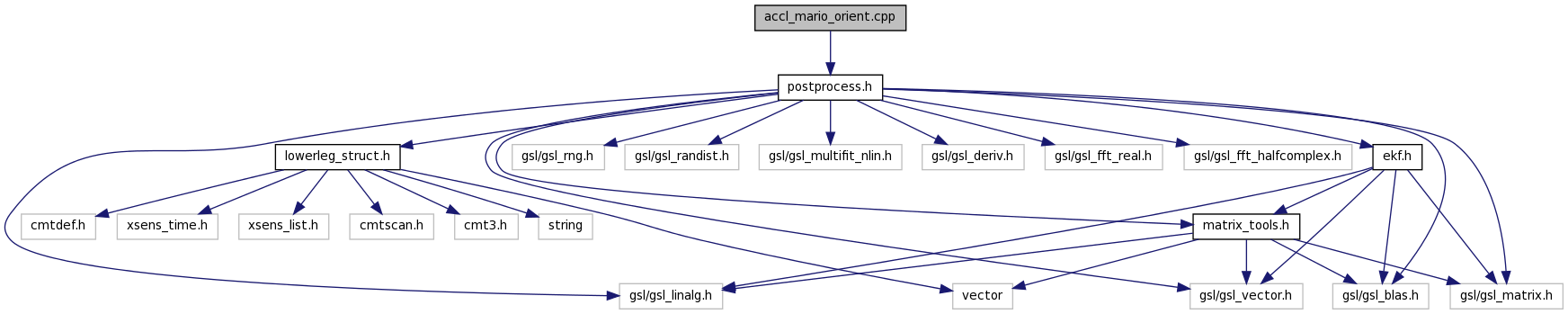
#include "postprocess.h" Include dependency graph for accl_mario_orient.cpp:
Include dependency graph for accl_mario_orient.cpp:Functions | |
| int | accl_mario_orient (double *quat_mario, double *quat) |
| Calculate the transformation to convert from accelerometer's earth-global frame to MARIONET frame of ref. | |
| int accl_mario_orient | ( | double * | quat_mario, |
| double * | quat | ||
| ) |
Calculate the transformation to convert from accelerometer's earth-global frame to MARIONET frame of ref.
The function calculates the transformation that converts data in accelerometer system's reference frame (which expresses orientation with respect to the earth-fixed global frame) to the co-ordinates expressed in terms of reference system fixed to the MARIONET.
| [in] | quat_mario | Quaternion describing orientation of MARIONET w.r.t earth fixed system |
| [in,out] | quat | Quaternion describing orientation of acclerometer w.r.t earth fixed system. The function calculates the quaternion w.r.t MARIONET and stores it back here. |
References quat_multiply().
Referenced by load_accl_data().
Here is the call graph for this function: Here is the caller graph for this function: 1.7.4
1.7.4