INRIA home page
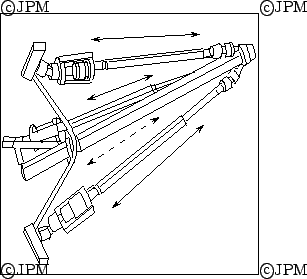
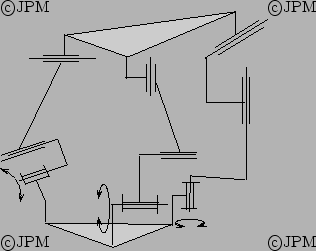
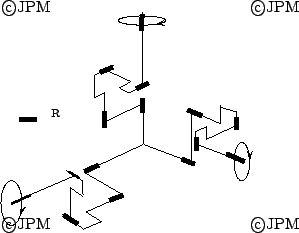
Robots à 3 degrés de liberté en translation:
le "Delta",
utilisant des actionneurs rotatifs en partie haute,
d'après Clavel [
30].
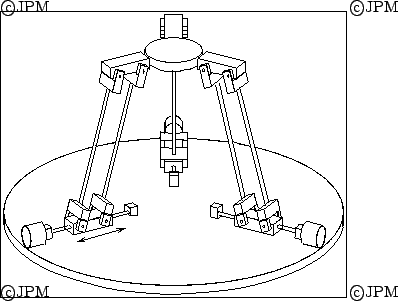
The "Delta" robot of Clavel. The special structure of this robot
insure that only translation are possible for the mobile platform. The
actuated revolute joints lie on the upper plate.
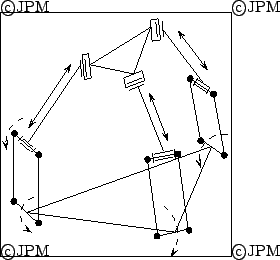
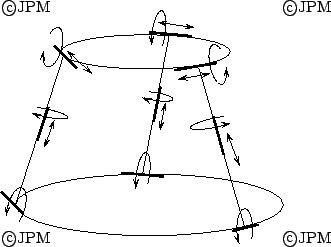
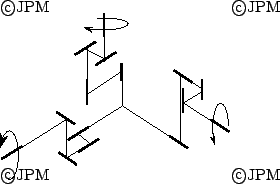
Robots à 3 degrés de liberté en translation appelée 3-UPU.
Un choix judicieux des axes des joints de Cardan permet de
n'obtenir que des translations,
d'après Tsai [
170]. Une généralisation de ce concept
est présentée dans [
36]. On peut faire sur le
même
principe des robots 3-RUU, 3 PUU [
169]. Le robot 3-UPU est
un cas particulier de robot de la famille 3-RRPRR
A 3-dof translation robot. A convenient choice of the axis of the
universal joints enable to have only translations. A generalization of
this concept can be found in [
36]. The 3-UPU robot is a
special case of the 3-RRPRR family.
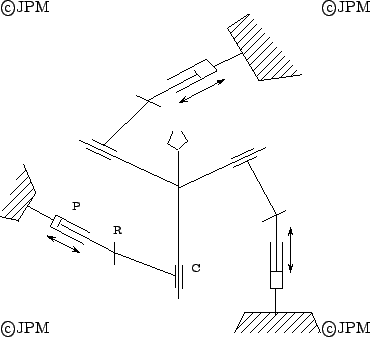
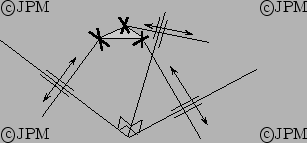
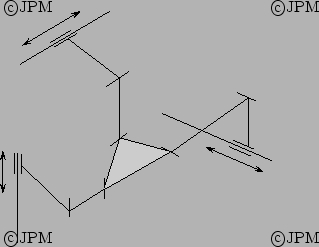
A la place du 3-RRPRR (dont le 3-UPU est un cas particulier) on peut
aussi définir des 3-RPRRR ou des 3-PRRRR comme dans ce
cas [
23] ou des 3-PRUR [
184].
Instead of the 3-RRPRR (a class of which the 3-UPU is a special case)
we may also define 3-RPRRR or 3-PRRRR as in this drawing or 3-PRUR.
Une variante de 3-PRRRR [
84].
A variant of 3-PRRRR
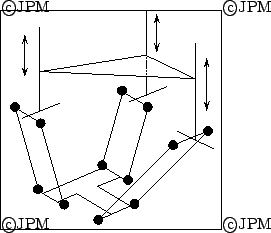
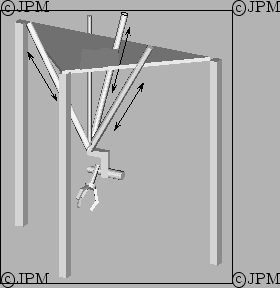
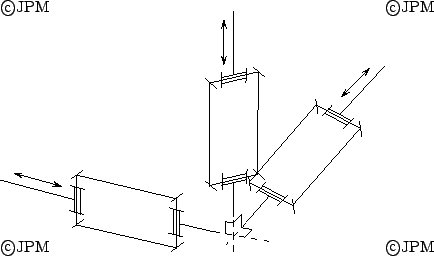
Robots à 3 degrés de liberté en translation: une variante du Delta. Les leviers
rotatifs sont remplacés par des actionneurs linéaires, ici
placés verticalement [
191].
A 3-dof translation robot which is a variant of the Delta robot: here
the rotary actuator are substituted by a linear actuator whose axis is
vertical [
191].
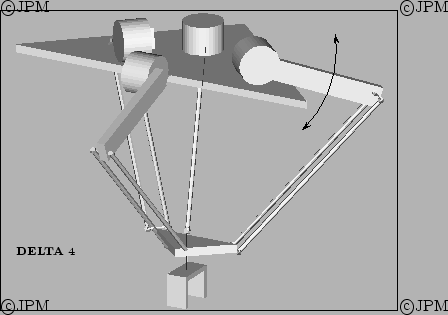
Robots à 3 degrés de liberté en translation: une variante redondante du Delta dans laquelle
il y a 4 bras rotatifs mais seulement 2 jambes, appelé Delta4.
A redundant variant of the Delta robot with 4 rotary actuators but
only 2 legs [
6].
Robots à 3 degrés de liberté en translation: une variante du Delta dans laquelle
les bras rotatifs sont remplacés par deux actionneurs linéaires.
The
Speed-R-Man which
is very similar to
the
Delta, although the rotary actuators
are replaced by two linear actuators acting on the same point.
His mechanism therefore is redundant and presents interesting speed
characteristics [
146].
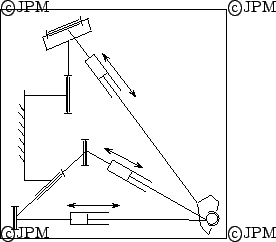
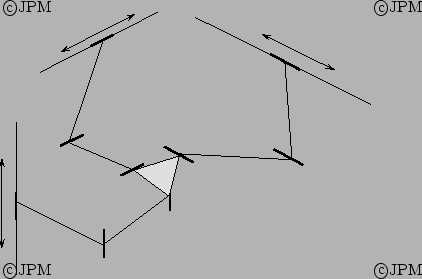
Robots à 3 degrés de liberté en translation:
le "Star": les actionneurs
rotatifs entraînent l'écrou d'une vis sans fin sur lequel est
articulé un parallélogramme. L'autre extrémité du
parallélogramme est reliée par une articulation à l'organe
terminal, d'après Hervé [
65].
The "Star" robot of Hervé. Revolute actuated joints lead a ball
screw on which is fixed a paralelogramm.
Dans une variation du "Star"
les actionneurs prismatiques
entrainant les parallélogrammes ont des axes parallèles
conduisant au "H-robot",d'après Hervé [
66].
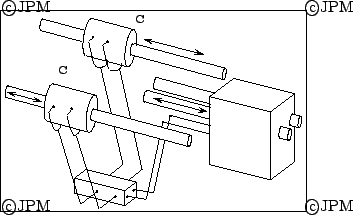
Robots à 3 degrés de liberté en translation:
le "Prism robot": trois actionneurs prismatiques entrainent en translation
les articulations cylindriques C, d'après Hervé [
66].
The "prism robot": three linear actuators move the cylindrical joints C
Une variante du Prism robot [
179]. A variant of the Prism
robot
Le mécanisme de
Pollard, l'ancétre du "Delta", d'après Pollard [
141].
The robot of Pollard, the ancester of the "Delta" robot.
Une variante du Delta, le mécanisme de
Mitova (d'après Mitova [
127]).
A variant of the "Delta" robot
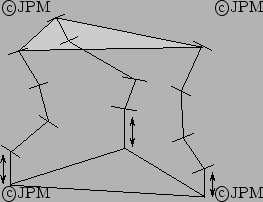
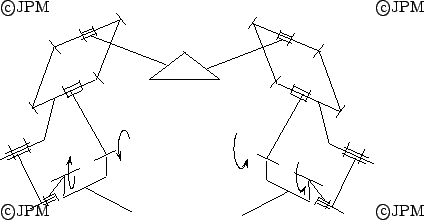
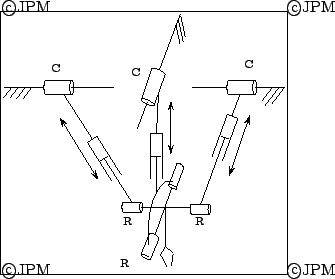
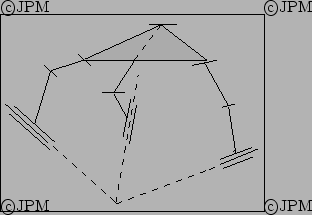
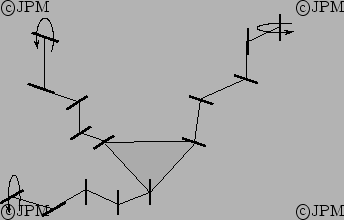
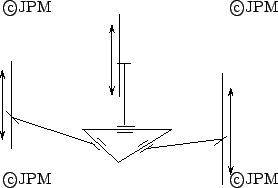
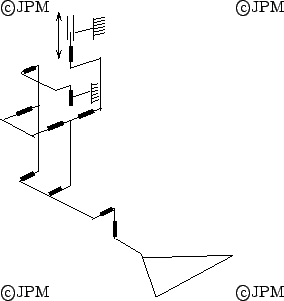
Le positionneur de Millies: les articulations sur
l'organe terminal sont alignées et trois actionneurs rotatifs sont
utilisés. Les joints de Cardan sont représentés
par un carré noir,
les actionneurs rotatifs par un arc fléché ,
d'après Kokkinis [
90].
The positionning system of Millies: universal joints are represented
by the black squares, actuated revolute joints by an arc.
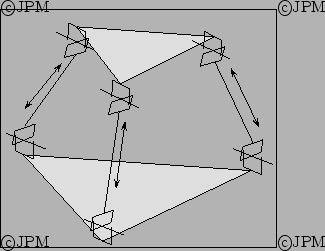
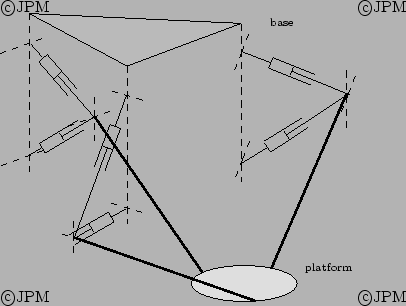
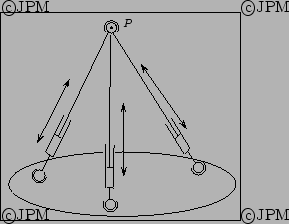
Les prototypes de Mianowski.
Trois générateurs de

agissent directement sur le point à déplacer.
The prototypes of Mianowski: three generators of spatial displacement
are applied at the same point.
Ici
deux actionneurs
linéaires sont montés en tandem sur un joint de Cardan et agissent sur
une double rotule alors qu'un troisième actionneur linéaire monté sur
cardan permet de commander le dernier degré de liberté, d'après Mianowski [
125].
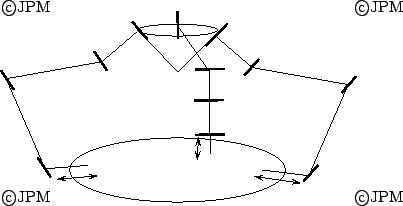
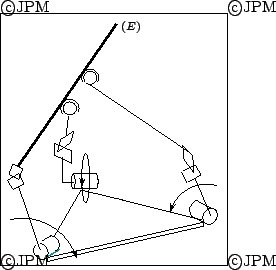
Le prototype de Neumann. Une tige montée sur
rotule, de longueur variable lie l'organe terminal à la base, d'après Neumann [
130].
Trois actionneurs linéaires permettent
de modifier la position de l'organe terminal.
The Nemann prototype. A passive variable length stem constraints the
end-effector and 3 linear actuator enable to control the motion.
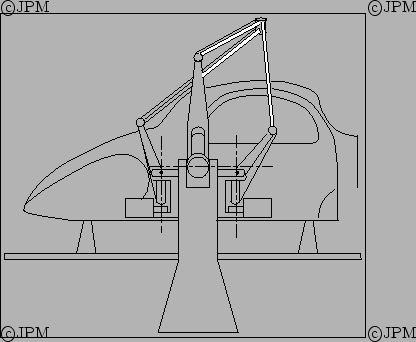
Le "Tetrabot" de Marconi
à 6 degrés de liberté
(les 3 translations sont contrôlées par le mécanisme de Neumann
et les 3 orientations par un poignet
classique), d'après Thornton [
167].
The "Tetrabot" from Marconi. A Neumann mechanism enable to control the
translation of the robot while a classical wrist enable to control the
orientation of the end-effector.
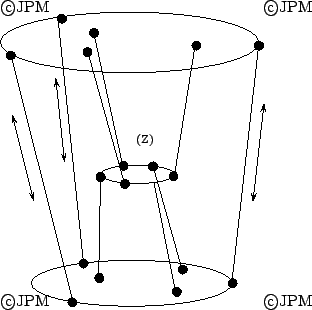
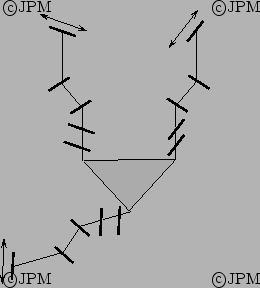
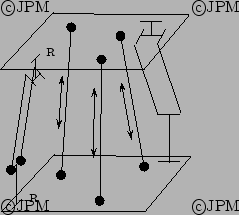
Un robot avec des contraintes passives. Le but du double mécanisme
parallèle passif (Z) est de contraindre la plate-forme à n'avoir que
des translations [
72].
A robot with passive constraints. The purpose of the double parallel
mechanism (Z) is to constrain the platform to have only translational
d.o.f.
Le mécanisme de Kong de type 3-CRR [
91].
Le mécanisme de Shen de type 3-CCR [
161].
Le mécanisme de Callegari de type 3-RCC [
21].
Le mécanisme de Callegari de type 3-CPU [
22]. Des
translations de l'organe terminal sont obtenus en raison de
dispositions particulières de la géom'etrie
Translation mechanism of type 3-CPU: translation are obtained only
because some geometrical constraints are fulfilled.
The Orthoglide robot [
175].
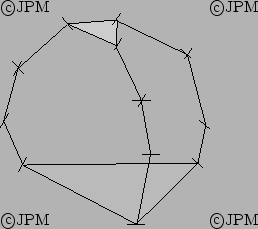
Le robot de Frisoli avec uniquement des articulations
rotoïdes [
45]
A translational robot with only revolute joints.
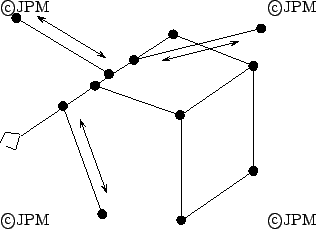
Le R-Cube, un autre robot de translation avec uniquement des articulations
rotoïdes [
105]
The R-Cube, another translational robot with only revolute joints.
Le R-Cube est simplement un membre de la famille des robot dont les
chaînes exhibe un mouvement plan. Ici un autre exemple le
3-PRR-RR qui peut se décliner sous la forme 3-RRR-RR, 3-RPR-RR ou
3-RRP-RR [
101]
The R-Cube is a member of the robot family whose legs have planar
gliding motion. Here another example, the 3-PRR-RR but there may other
form such as 3-RRR-RR, 3-RPR-RR or 3-RRP-RR
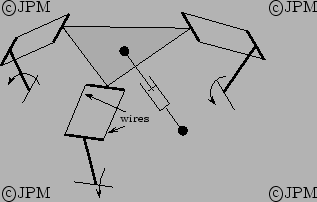
Le Deltabot de Behzadipour, une version du Delta où les barres des
parallélogrammes sont remplacés par ces
câbles. Un vérin assure la mise en tension des
câbles [
13].
A version of the Delta where the parallelogram are substituted by
wires. A jack allows to maintain the tension in the wires
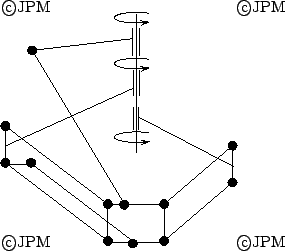
Ici les bras tournent autour du mme axe vertical. Les deux du base
servent à commander les mouvements en x-y alors que le 3eme permet
les mouvements en z [
18]
Here the three arms are rotating around the same axis. The two lower
arms allow to control the x-y motion while the third arm is used for
the z motion
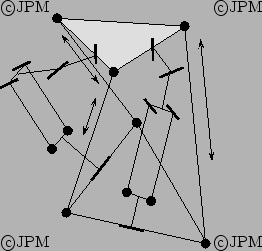
Ici 2 chaînes passives contraignent en translation la
plate-forme. L'actionnement est assuré par 3 actionneurs
linéaires [
152]
Here two passive chains impose translation only for the platform. The
motion are controlled by linear actuators.
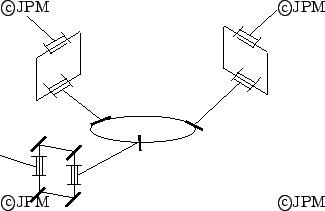
Ici le mouvement de 3 mécanismes à 4 barres permet de contrôler
les translation de la plate-forme [
106]
Here 4-bars mechanisms allow the control of the platform translation
Le Tripteron proposé par Kong [
53].
Un robot de type 3-PRC proposé par Li [
107]. Les axes
du

pourrait être horizontal ou incliné.
A PRC robot. Note that the

axis may be horizontal or tilted as well.
Le robot RAF avec des chaînes de
contraintes [
99]. Les chaînes passives assurent que
les axes des articulations rotoïdes R sur la base et la
plate-forme restent parallèles, ce qui contraint l'orientation de la
plate-forme.
The RAF robot with constraining chains: the axis of the revolution
joints R on the base and platform remain parallel, thereby
constraining the orientation of the platform
Ici un double parallélogramme contraint l'orientation de la
plate-forme et des déplacements en translation sont assurés par
trois actionneurs linéaires [
173].
Here a double parallelogram constrains the orientation of the mobile
platform while its translation are controlled by three linear
actuators.
Ici des chaînes de type

avec des axes
parallèles ou perpendiculaires et de dimension spéciales
permettent d'obtenir des translations [
100].
Here

chains with parallel or perpendicular axis
and special dimensions allows one to obtain translation
Ici des chaînes de type

avec des axes
parallèles ou perpendiculaires et de dimension spéciales
permettent d'obtenir des translations [
51]
Here

chains with parallel or perpendicular axis
and special dimensions allows one to obtain translation
Une jambe du Pantopteron [
16], un robot découplé.
One leg of the Pantopteron.


 Next: Manipulateurs pour orientation/Orientation robots
Up: Manipulateurs à 3 degrés de liberté/3 DOF robots
Previous: Manipulateurs à 3 degrés de liberté/3 DOF robots
Next: Manipulateurs pour orientation/Orientation robots
Up: Manipulateurs à 3 degrés de liberté/3 DOF robots
Previous: Manipulateurs à 3 degrés de liberté/3 DOF robots