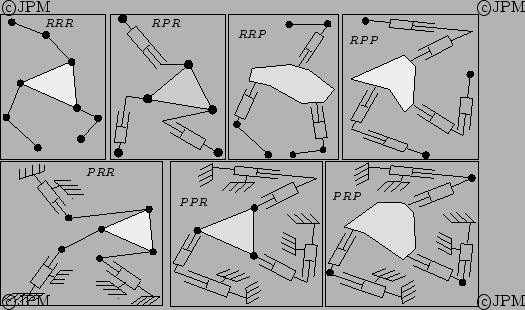
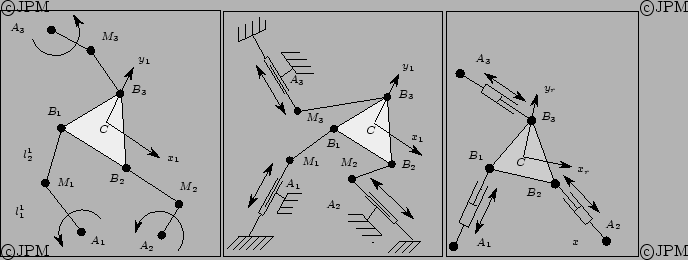
Les différents robots pleinement parallèles
plans à 3 degrés de liberté.
Fully parallel planar 3-dof robots
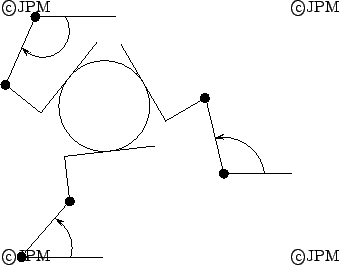
Le robot de Hayes et Zsombor-Murray: la plate-forme mobile est
circulaire et son positionnement est assuré par le roulement sans
frottement de 3 tiges qui lui sont tangentes. Ces tiges sont
actionnées par des chaînes de type 2R, d'après
Hayes [
62].
The platform is circular and rolls without slip on each
of the three rack tangent to it. Each rack is connected to the
base via two revolute pairs.
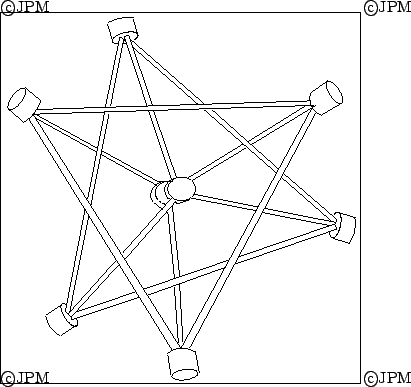
On peut trouver des architectures plus exotiques comme ce double
tetraèdre de Zsombor-Murray.
More exotic architectures can also be found, such as
the Zsombor-Murray double
tetrahedron. The two
tetrahedra overlap, and each of their contact lines can slide
on top of any other [
41]