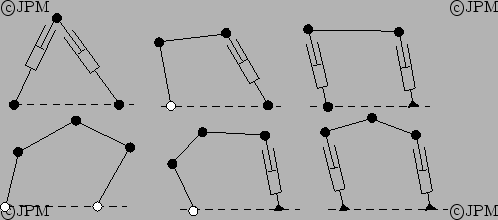
Les robots plans à deux
degrés de liberté, d'après MacCloy [
120].
Les articulations sont les cercles
blancs pour celles actionnées et noirs pour les passives.
Planar 2-dof robot. Actuated revolute joints are represented by white
circles while black circles are passive revolute joints.
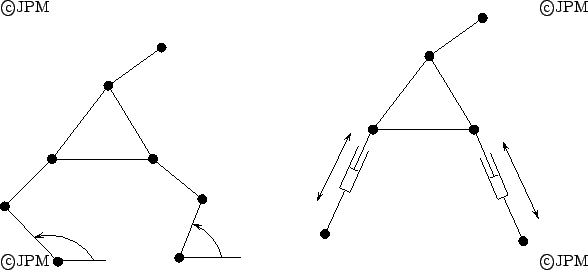
Un mécanisme à 2 degrés de libertépour le suivi de
satellites [
38]. A 2 DOF mechanism for satellite tracking:
the Canterbury tracker.