|
shape_doc 0.1
|
|
shape_doc 0.1
|
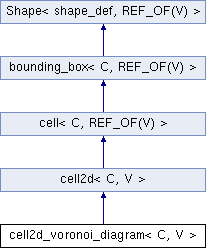
#include <cell2d_voronoi_diagram.hpp>
Definition at line 41 of file cell2d_voronoi_diagram.hpp.
| typedef cell<C,V>::BoundingBox BoundingBox |
Reimplemented from cell2d< C, V >.
Definition at line 47 of file cell2d_voronoi_diagram.hpp.
Reimplemented in cell2d_algebraic_curve< C, V >, cell2d_parametric_curve< C, V >, and cell2d_voronoi_site2d< C, V >.
Definition at line 65 of file cell2d.hpp.
| typedef Interval<double> coeff |
Definition at line 53 of file cell2d_voronoi_diagram.hpp.
| typedef topology2d<C,V>::Edge Edge |
Reimplemented from cell2d< C, V >.
Definition at line 49 of file cell2d_voronoi_diagram.hpp.
Reimplemented from cell2d< C, V >.
Definition at line 48 of file cell2d_voronoi_diagram.hpp.
| typedef polynomial< Interval<double>, with<Bernstein> > Polynomial |
Definition at line 52 of file cell2d_voronoi_diagram.hpp.
Reimplemented from cell2d< C, V >.
Definition at line 50 of file cell2d_voronoi_diagram.hpp.
| cell2d_voronoi_diagram | ( | void | ) |
Definition at line 637 of file cell2d_voronoi_diagram.hpp.
: m_intersected(false), m_treated(false) {}
| cell2d_voronoi_diagram | ( | double | xmin, |
| double | xmax | ||
| ) |
| cell2d_voronoi_diagram | ( | double | xmin, |
| double | xmax, | ||
| double | ymin, | ||
| double | ymax | ||
| ) |
Definition at line 640 of file cell2d_voronoi_diagram.hpp.
: cell2d<C,V>(xmin, xmax, ymin, ymax), m_intersected(false), m_bisector(false), m_treated(false) {}
| cell2d_voronoi_diagram | ( | double | xmin, |
| double | xmax, | ||
| double | ymin, | ||
| double | ymax, | ||
| bool | itr | ||
| ) |
Definition at line 643 of file cell2d_voronoi_diagram.hpp.
: cell2d<C,V>(xmin, xmax, ymin, ymax), m_intersected(itr), m_bisector(false), m_treated(false) {}
| cell2d_voronoi_diagram | ( | const BoundingBox & | bx | ) |
Definition at line 646 of file cell2d_voronoi_diagram.hpp.
: cell2d<C,V>(bx), m_intersected(false), m_bisector(false), m_treated(false) {};
| ~cell2d_voronoi_diagram | ( | void | ) | [virtual] |
Definition at line 649 of file cell2d_voronoi_diagram.hpp.
| void addsite | ( | unsigned | i | ) | [inline] |
Definition at line 165 of file cell2d_voronoi_diagram.hpp.
{m_sites<<i;};
| BoundingBox boundingBox | ( | ) | const [inline, inherited] |
Definition at line 88 of file cell.hpp.
{ return (BoundingBox)*this; }
| virtual Point center | ( | void | ) | const [inline, virtual, inherited] |
| bool compute_boundary | ( | ) | [inline] |
Definition at line 371 of file cell2d_voronoi_diagram.hpp.
References Cell2d, Cell2dAlgebraicCurve, cell2d< C, V >::e_neighbors, cell2d_voronoi_diagram< C, V >::intersections(), cell2d_voronoi_diagram< C, V >::m_bisector, cell2d_voronoi_diagram< C, V >::m_objects, cell2d_voronoi_diagram< C, V >::m_sites, cell2d_voronoi_diagram< C, V >::m_treated, cell2d< C, V >::n_neighbors, cell2d< C, V >::s_neighbors, SELF, cell2d< C, V >::w_neighbors, point< C, V, N >::x(), bounding_box< C, REF_OF(V) >::xmax(), bounding_box< C, REF_OF(V) >::xmin(), point< C, V, N >::y(), bounding_box< C, REF_OF(V) >::ymax(), and bounding_box< C, REF_OF(V) >::ymin().
{
int i(0),j(0), r(m_sites.size()-1);
foreach ( Cell* obj, this->m_objects)
{
Cell2dAlgebraicCurve* cc= dynamic_cast<Cell2dAlgebraicCurve*>(obj);
if (j<r) // bisector signature (i,j)
j++;
else
{ i++; j=i+1;}
//0
if ( this->s_neighbors.size()==0)
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::south_edge,
*cc);
cc->s_intersections << ip;
}
else
foreach( Cell2d *c, this->s_neighbors )
if ( ((SELF*)c)->m_bisector )
{
Seq<unsigned> a= ((SELF*)c)->sites();
if ( a.member( m_sites[i]) && a.member(m_sites[j]) )
{
foreach(Point * p, ((SELF*)c)->intersections(2) )
if (this->xmin()<p->x() && this->xmax()>p->x())
cc->s_intersections << p;
}
}
else if ( ((SELF*)c)->m_treated )
{
int u(0),v(0);
foreach( Cell *nc, ((SELF*)c)->m_objects )
{
if (v<r) // bisector signature (u,v)
v++;
else
{ u++; v=u+1;}
if ( ((SELF*)c)->m_sites[u]==m_sites[i] &&
((SELF*)c)->m_sites[v]==m_sites[j] )
foreach(Point * p, ((SELF*)nc)->intersections(2) )
if (this->xmin()<p->x() && this->xmax()>p->x())
cc->s_intersections << p;
}
}
else
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::south_edge,
*cc );
foreach(Point * p, ip )
if (c->xmin()<p->x() && c->xmax()>p->x())
cc->s_intersections << p;
//std::cout<<"ip: "<< ip.size() <<"\n";
}
//1
if (this->e_neighbors.size()==0)
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::east_edge,
*cc);
cc->e_intersections << ip;
}
else
foreach( Cell2d *c, this->e_neighbors )
if ( ((SELF*)c)->m_bisector )
{
Seq<unsigned> a= ((SELF*)c)->sites();
if ( a.member( m_sites[i]) && a.member(m_sites[j]) )
{
foreach(Point * p, ((SELF*)c)->intersections(3) )
if (this->ymin()<p->y() && this->ymax()>p->y())
cc->e_intersections << p;
}
}
else if ( ((SELF*)c)->m_treated )
{
int u(0),v(0);
foreach( Cell *nc, ((SELF*)c)->m_objects )
{
if (v<r) // bisector signature (u,v)
v++;
else
{ u++; v=u+1;}
if ( ((SELF*)c)->m_sites[u]==m_sites[i] &&
((SELF*)c)->m_sites[v]==m_sites[j] )
foreach(Point * p, ((SELF*)nc)->intersections(3) )
if (this->ymin()<p->y() && this->ymax()>p->y())
cc->e_intersections << p;
}
}
else
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::east_edge,
*cc );
foreach(Point * p, ip )
if (c->ymin()<p->y() && c->ymax()>p->y())
cc->e_intersections << p;
}
//2
if (this->n_neighbors.size()==0 )
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::north_edge,
*cc);
cc->n_intersections << ip;
}
else
foreach( Cell2d *c, this->n_neighbors )
if ( ((SELF*)c)->m_bisector )
{
Seq<unsigned> a= ((SELF*)c)->sites();
if ( a.member( m_sites[i]) && a.member(m_sites[j]) )
{
foreach(Point * p, ((SELF*)c)->intersections(0) )
if (this->xmin()<p->x() && this->xmax()>p->x())
cc->n_intersections << p;
}
}
else if ( ((SELF*)c)->m_treated )
{
int u(0),v(0);
foreach( Cell *nc, ((SELF*)c)->m_objects )
{
if (v<r) // bisector signature (u,v)
v++;
else
{ u++; v=u+1;}
if ( ((SELF*)c)->m_sites[u]==m_sites[i] &&
((SELF*)c)->m_sites[v]==m_sites[j] )
foreach(Point * p, ((SELF*)nc)->intersections(0) )
if (this->xmin()<p->x() && this->xmax()>p->x())
cc->n_intersections << p;
}
}
else
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::north_edge,
*cc );
foreach(Point * p, ip )
if (c->xmin()<p->x() && c->xmax()>p->x())
cc->n_intersections << p;
}
//3
if (this->w_neighbors.size()==0)
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::west_edge,
*cc);
cc->w_intersections << ip;
}
else
foreach( Cell2d *c, this->w_neighbors )
if ( ((SELF*)c)->m_bisector )
{
Seq<unsigned> a= ((SELF*)c)->sites();
if ( a.member( m_sites[i]) && a.member(m_sites[j]) )
{
//Cell2d *c;
//foreach(Point * p, ((VSite*)( ((SELF*)c)->m_objects[0]))->e_intersections )
foreach(Point * p, ((SELF*)c)->intersections(1) )
if (this->ymin()<p->y() && this->ymax()>p->y())
cc->w_intersections << p;
}
}
else if ( ((SELF*)c)->m_treated )
{
int u(0),v(0);
foreach( Cell *nc, ((SELF*)c)->m_objects )
{
if (v<r) // bisector signature (u,v)
v++;
else
{ u++; v=u+1;}
if ( ((SELF*)c)->m_sites[u]==m_sites[i] &&
((SELF*)c)->m_sites[v]==m_sites[j] )
foreach(Point * p, ((SELF*)nc)->intersections(1) )
if (this->ymin()<p->y() && this->ymax()>p->y())
cc->w_intersections << p;
}
}
else
{
Seq<Point *> ip;
Solver::edge_point(ip,
cc->m_polynomial,
Solver::west_edge,
*cc );
foreach(Point * p, ip )
if (c->ymin()<p->y() && c->ymax()>p->y())
cc->w_intersections << p;
//std::cout<<"west: "<< *ip[0] <<"\n";
}
}
this->m_treated=true;
return true;
}//compute_boundary
Definition at line 281 of file cell2d.hpp.
References mmx::shape::check_overlap(), and SELF.
{
int i;
bool flag;
//copy horizontally
b->e_neighbors= this->e_neighbors ;
foreach(SELF* cl,b->e_neighbors) {
i= cl->w_neighbors.search(this);
cl->w_neighbors[i]= b;
}
a->w_neighbors= this->w_neighbors ;
foreach(SELF* cl,a->w_neighbors) {
i= cl->e_neighbors.search(this);
cl->e_neighbors[i]= a;
}
//update vertically
foreach(SELF* cl,this->s_neighbors) {
flag=false;
if ( check_overlap(cl,a,0))
{
//assert( cl->ymax()== a->ymin() );
a->s_neighbors<< cl;
i= cl->n_neighbors.search(this);
cl->n_neighbors[i]= a;
flag=true;
}
if ( check_overlap(cl,b,0) )
{
//assert( cl->ymax()== b->ymin() );
b->s_neighbors<< cl;
if (!flag)
{
i= cl->n_neighbors.search(this);
cl->n_neighbors[i]= b;
}
else
cl->n_neighbors << b;
}
}
foreach(SELF* cl,this->n_neighbors) {
flag=false;
if ( check_overlap(cl,a,0))
{
a->n_neighbors<< cl;
i= cl->s_neighbors.search(this);
cl->s_neighbors[i]= a;
flag=true;
}
if ( check_overlap(cl,b,0) )
{
b->n_neighbors<< cl;
if (!flag)
{
i= cl->s_neighbors.search(this);
cl->s_neighbors[i]= b;
}
else
cl->s_neighbors << b;
}
}
}
Definition at line 346 of file cell2d.hpp.
References mmx::shape::check_overlap(), and SELF.
{
int i;
bool flag;
//copy vertically
a->s_neighbors= this->s_neighbors ;
foreach(SELF* cl,a->s_neighbors) {
i= cl->n_neighbors.search(this);
cl->n_neighbors[i]= a;
}
b->n_neighbors= this->n_neighbors ;
foreach(SELF* cl,b->n_neighbors) {
i= cl->s_neighbors.search(this);
cl->s_neighbors[i]= b;
}
//update horizontally
foreach(SELF* cl,this->w_neighbors) {
flag=false;
if ( check_overlap(cl,a,1))
{
//assert( cl->xmax()== a->xmin() );
a->w_neighbors<< cl;
i= cl->e_neighbors.search(this);
cl->e_neighbors[i]= a;
flag=true;
}
if ( check_overlap(cl,b,1) )
{
//assert( cl->xmax()== b->xmin() );
b->w_neighbors<< cl;
if (!flag)
{
i= cl->e_neighbors.search(this);
cl->e_neighbors[i]= b;
}
else
cl->e_neighbors << b;
}
}
foreach(SELF* cl,this->e_neighbors) {
flag=false;
if ( check_overlap(cl,a,1))
{
a->e_neighbors<< cl;
i= cl->w_neighbors.search(this);
cl->w_neighbors[i]= a;
flag=true;
}
if ( check_overlap(cl,b,1) )
{
b->e_neighbors<< cl;
if (!flag)
{
i= cl->w_neighbors.search(this);
cl->w_neighbors[i]= b;
}
else
cl->w_neighbors << b;
}
}
}
| bool contains | ( | double | x, |
| bool | strict = false |
||
| ) | [inherited] |
| bool contains | ( | double | x, |
| double | y, | ||
| bool | strict = false |
||
| ) | [inherited] |
| bool contains | ( | double | x, |
| double | y, | ||
| double | z, | ||
| bool | strict = false |
||
| ) | [inherited] |
| int count | ( | void | ) | [inline] |
Definition at line 115 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_objects.
Referenced by cell2d_voronoi_diagram< C, V >::signof(), and cell2d_voronoi_diagram< C, V >::site().
{ return m_objects.size() ; }
| void disconnect | ( | ) | [inline, inherited] |
Definition at line 422 of file cell2d.hpp.
{
this->e_neighbors.clear();
this->w_neighbors.clear();
this->n_neighbors.clear();
this->s_neighbors.clear();
}
| Polynomial func | ( | const int | i | ) | const [inline] |
Definition at line 116 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_objects, and VSite.
| bool insert_regular | ( | Topology * | s | ) | [virtual] |
Implements cell< C, REF_OF(V) >.
Definition at line 684 of file cell2d_voronoi_diagram.hpp.
References Cell2d, Cell2dAlgebraicCurve, Edge, EPSILON, topology< C, V >::insert(), cell< C, V >::is_active(), mmx::shape::print(), SELF, and VSite.
{
Seq<Point*> l;
l= this->intersections();
//std::cout<<"VD, regular: "<< *this<<", #="<<l.size() <<std::endl;
// foreach( Point* e, l)
// std::cout<<*e <<", at "<< e <<std::endl;
int * sz;
int * st;
Point *q;
if ( l.size()==2 )
{
s->insert( l[0] );
s->insert( l[1] );
s->insert( new Edge(l[0],l[1]) );
return true;
}
if ( l.size()==4 ) // two dublicated
{
s->insert( l[0] );
s->insert( l[1] );
s->insert( new Edge(l[0],l[1]) );
return true;
}
if ( l.size()==1)
{
std::cout<< "SIZE ONE, "<< *this<<std::endl;
s->insert( l[0] );
foreach( Cell* c, this->m_objects )
if ( ((Cell2d*)c)->nb_intersect()==1 )
{
sz= ((VSite*)c)->m_polynomial.rep().szs();
st= ((VSite*)c)->m_polynomial.rep().str();
if ( ((VSite*)c)->m_polynomial[0]<EPSILON )
{
q= new Point(this->xmin(),this->ymin(),0);
std::cout<< "1.add ("<< *q <<")->("<< *l[0] << ") in "<< *this<<std::endl;
s->insert(q);
s->insert( new Edge(l[0],q) );
((VSite*)c)->n_intersections<< q;
foreach( Cell2d *nb, this->s_neighbors )
foreach( Cell* cc, ((SELF*)nb)->m_objects )
if ( cc->is_active() )
{
((VSite*)cc)->n_intersections<< q;
std::cout<<"This Intersections: "<< this->intersections().size() << std::endl;
std::cout<<"Neib Intersections: "<< nb->intersections().size() << std::endl;
return true;
}
foreach( Cell2d *nb, this->w_neighbors )
foreach( Cell* cc, ((SELF*)nb)->m_objects )
if ( cc->is_active() )
{
((VSite*)cc)->e_intersections<< q;
std::cout<<"This Intersections: "<< this->intersections().size() << std::endl;
std::cout<<"Neib Intersections: "<< nb->intersections().size() << std::endl;
return true;
}
} else if ( ((VSite*)c)->m_polynomial[(sz[0]-1)*st[0]]<EPSILON )
{
q= new Point(this->xmax(),this->ymax(),0);
std::cout<< "2.add ("<< *q <<")->("<< *l[0] << ") in "<< *this<<std::endl;
s->insert(q);
s->insert( new Edge(l[0],q) );
((VSite*)c)->s_intersections<< q;
foreach( Cell2d *nb, this->e_neighbors )
foreach( Cell* cc, ((SELF*)nb)->m_objects )
if ( cc->is_active() )
{
((VSite*)cc)->w_intersections<< q;
std::cout<<"This Intersections: "<< this->intersections().size() << std::endl;
std::cout<<"Neib Intersections: "<< nb->intersections().size() << std::endl;
return true;
}
foreach( Cell2d *nb, this->n_neighbors )
foreach( Cell* cc, ((SELF*)nb)->m_objects )
if ( cc->is_active() )
{
((VSite*)cc)->s_intersections<< q;
std::cout<<"This Intersections: "<< this->intersections().size() << std::endl;
std::cout<<"Neib Intersections: "<< nb->intersections().size() << std::endl;
return true;
}
} else if ( ((VSite*)c)->m_polynomial[sz[0]*sz[1]-1]<EPSILON )
{
q= new Point(this->xmin(),this->ymax(),0);
std::cout<< "3.add ("<< *q <<")->("<< *l[0] << ") in "<< *this<<std::endl;
s->insert(q);
s->insert( new Edge(l[0],q) );
((VSite*)c)->w_intersections<< q;
return true;
} else if ( ((VSite*)c)->m_polynomial[(sz[1]-1)*st[1]]<EPSILON )
{
q= new Point(this->xmax(),this->ymin(),0);
std::cout<< "4.add ("<< *q <<")->("<< *l[0] << ") in "<< *this<<std::endl;
s->insert(q);
s->insert( new Edge(l[0],q) );
((VSite*)c)->e_intersections<< q;
return true;
}
}
}
if ( l.size()==0)
{
std::cout<< "SIZE ZERO, "<< *this<<std::endl;
return true;
foreach( Cell* c, this->m_objects )
{
sz= ((VSite*)c)->m_polynomial.rep().szs();
st= ((VSite*)c)->m_polynomial.rep().str();
if ( ((VSite*)c)->m_polynomial[0]<EPSILON )
{
q= new Point(this->xmin(),this->ymin(),0);
std::cout<< "1.add ("<< *q <<") in "<< *this<<std::endl;
s->insert(q);
((VSite*)c)->n_intersections<< q;
return true;
} else if ( ((VSite*)c)->m_polynomial[(sz[0]-1)*st[0]]<EPSILON )
{
q= new Point(this->xmax(),this->ymax(),0);
std::cout<< "1.add ("<< *q <<") in "<< *this<<std::endl;
s->insert(q);
((VSite*)c)->s_intersections<< q;
return true;
} else if ( ((VSite*)c)->m_polynomial[sz[0]*sz[1]-1]<EPSILON )
{
q= new Point(this->xmin(),this->ymax(),0);
std::cout<< "1.add ("<< *q <<") in "<< *this<<std::endl;
s->insert( new Edge(l[0],q) );
((VSite*)c)->w_intersections<< q;
return true;
} else if ( ((VSite*)c)->m_polynomial[(sz[1]-1)*st[1]]<EPSILON )
{
q= new Point(this->xmax(),this->ymin(),0);
std::cout<< "1.add ("<< *q <<") in "<< *this<<std::endl;
s->insert(q);
s->insert( new Edge(l[0],q) );
((VSite*)c)->e_intersections<< q;
return true;
}
}
}
std::cout<< "nb_in= "<< this->nb_intersect() <<std::endl;
//std::cout<< "box = "<< *this <<std::endl;
//foreach(Point* q, this->intersections() )
//std::cout<< " "<< *q <<std::endl;
print((Cell2dAlgebraicCurve*)m_objects[0]);
return true;
}
| virtual bool insert_singular | ( | Topology * | ) | [inline, virtual] |
Implements cell< C, REF_OF(V) >.
Definition at line 69 of file cell2d_voronoi_diagram.hpp.
{return false;};// not used
| bounding_box<C,REF_OF(V) >* intersect | ( | const bounding_box< C, REF_OF(V) > & | other | ) | [inherited] |
| void intersected | ( | bounding_box< C, REF_OF(V) > * | other | ) | [inherited] |
| virtual Seq<Point *> intersections | ( | int | i | ) | const [inline, virtual] |
Reimplemented from cell2d< C, V >.
Definition at line 86 of file cell2d_voronoi_diagram.hpp.
References Cell2dAlgebraicCurve, and cell2d_voronoi_diagram< C, V >::m_objects.
{
Seq<Point*> l;
Cell2dAlgebraicCurve* c;
foreach(Cell*m, this->m_objects)
{
c = dynamic_cast<Cell2dAlgebraicCurve*>(m);
l<< c->intersections(i);
}
return l;
}
| Seq< typename mmx::shape::cell2d< C, V >::Point * > intersections | ( | ) | const [virtual] |
Reimplemented from cell2d< C, V >.
Definition at line 1182 of file cell2d_voronoi_diagram.hpp.
References Cell2d.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
{
Seq<Point *> s,e,n,w,r;
//std::cout<<"intersections, "<<*this<<std::endl;
Cell2d* cl;
foreach (Cell* m, m_objects)
{
cl = dynamic_cast<Cell2d*>(m);
s<< cl->s_intersections;
e<< cl->e_intersections;
n<< cl->n_intersections;
w<< cl->w_intersections;
}
s.sort(this->coord<0>);
e.sort(this->coord<1>);
n.sort(this->coord<0>);
w.sort(this->coord<1>);
r<<s;
r<<e;
r<<n.reversed();
r<<w.reversed();
return ( r );
}
| bool intersects | ( | bounding_box< C, REF_OF(V) > * | other, |
| bool | strict = true |
||
| ) | [inherited] |
| bool is0D | ( | void | ) | const [inline, inherited] |
Definition at line 80 of file bounding_box.hpp.
{ return ((m_xmin == m_xmax) && (m_ymin == m_ymax) && (m_zmin == m_zmax)) ; }
| bool is1D | ( | void | ) | const [inline, inherited] |
Definition at line 81 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin == m_ymax) && (m_zmin == m_zmax)) ; }
| bool is2D | ( | void | ) | const [inline, inherited] |
Definition at line 82 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin != m_ymax) && (m_zmin == m_zmax)) ; }
| bool is3d | ( | void | ) | const [inline, inherited] |
Definition at line 83 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin != m_ymax) && (m_zmin != m_zmax)) ; }
| bool is_active | ( | void | ) | [virtual] |
Implements cell< C, REF_OF(V) >.
Definition at line 1026 of file cell2d_voronoi_diagram.hpp.
{
if ( this->is_bisector() )
{
return (this->m_objects[0])->is_active();
}
else
{
return true;
}
}
| bool is_border | ( | void | ) | const [inline, inherited] |
Definition at line 121 of file cell2d.hpp.
Referenced by voronoi2d< C, V >::run(), topology2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
{
return ( this->s_neighbors.size()==0 ||
this->e_neighbors.size()==0 ||
this->n_neighbors.size()==0 ||
this->w_neighbors.size()==0 );
}
| bool is_corner | ( | void | ) | const [inherited] |
Definition at line 431 of file cell2d.hpp.
Referenced by voronoi2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
{
if (this->s_neighbors.size()==0 &&
this->e_neighbors.size()==0 )
return true;
else if (this->e_neighbors.size()==0 &&
this->n_neighbors.size()==0 )
return true;
else if (this->n_neighbors.size()==0 &&
this->w_neighbors.size()==0 )
return true;
else if (this->w_neighbors.size()==0 &&
this->s_neighbors.size()==0 )
return true;
return false;
}
| bool is_intersected | ( | void | ) | [virtual] |
Implements cell< C, REF_OF(V) >.
Definition at line 668 of file cell2d_voronoi_diagram.hpp.
{
if(this->m_objects.size() >1 && !m_intersected) {
// std::cout<<"Intersecting inside box "<< this <<std::endl;
for(unsigned i=0; i<this->m_objects.size();i++)
for(unsigned j=i+1; j<this->m_objects.size(); j++)
Intersection2dFactory::instance()->compute(this->m_singular, (Shape*)this->m_objects[i], (Shape*)this->m_objects[j], (BoundingBox)*this);
m_intersected = true;
}
if (this->m_singular.size() > 0) return true;
return false;
}
| bool is_regular | ( | void | ) | [virtual] |
Implements cell< C, REF_OF(V) >.
Definition at line 654 of file cell2d_voronoi_diagram.hpp.
{
//std::cout<<"bisector? "<< this->is_bisector()<<std::endl;
if ( this->is_bisector() )
{
return (this->m_objects[0])->is_regular();
}
else
{
return false;
}
}
| virtual bool is_touching | ( | void | ) | [inline, virtual] |
Definition at line 78 of file cell2d_voronoi_diagram.hpp.
{return true; };
| void join0 | ( | cell2d< C, V > * | b | ) | [inline, inherited] |
Definition at line 267 of file cell2d.hpp.
{
this->e_neighbors << b;
b->w_neighbors << this;
}
| void join1 | ( | cell2d< C, V > * | b | ) | [inline, inherited] |
Definition at line 274 of file cell2d.hpp.
{
b->s_neighbors << this;
this->n_neighbors << b;
}
| unsigned nb_intersect | ( | void | ) | const [virtual] |
Reimplemented from cell2d< C, V >.
Definition at line 1039 of file cell2d_voronoi_diagram.hpp.
References Cell2d.
Reimplemented from cell2d< C, V >.
Definition at line 1140 of file cell2d_voronoi_diagram.hpp.
References Cell2d.
{
foreach( Cell2d *c, this->s_neighbors )
if ( c->intersections(2).member(p) )
// foreach( Point* q, c->intersections(2) )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
return c;
foreach( Cell2d *c, this->e_neighbors )
if ( c->intersections(3).member(p) )
// foreach( Point* q, c->intersections(3) )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
return c;
foreach( Cell2d *c, this->n_neighbors )
if ( c->intersections(0).member(p) )
// foreach( Point* q, c->intersections(0) )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
return c;
foreach( Cell2d *c, this->w_neighbors )
if ( c->intersections(1).member(p) )
// foreach( Point* q, c->intersections(1) )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
return c;
/*
std::cout<<"Point "<<"("<<*p<<") not found in neighbs of "<< *this<<"( #neibs="<<this->neighbors().size() <<")"<<std::endl;
foreach( Cell2d* c, this->neighbors() )
{
std::cout<< *c <<" ints:"<< ((SELF*)c)->intersections().size() <<std::endl;
foreach(Point* q, c->intersections() )
std::cout<<"Point "<<q<<" ("<<*q<<")"<<std::endl;
}
*/
return NULL;
}
| virtual Seq<cell2d *> neighbors | ( | ) | [inline, virtual, inherited] |
Definition at line 162 of file cell2d.hpp.
Referenced by voronoi2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
{
Seq<cell2d *> r;
r<< this->s_neighbors;
r<< this->e_neighbors;
r<< this->n_neighbors;
r<< this->w_neighbors;
return ( r ); }
| double& operator() | ( | unsigned | v, |
| unsigned | s | ||
| ) | [inherited] |
| double operator() | ( | unsigned | v, |
| unsigned | s | ||
| ) | const [inherited] |
| bounding_box<C,REF_OF(V) >* operator* | ( | const bounding_box< C, REF_OF(V) > & | other | ) | [inline, inherited] |
Definition at line 103 of file bounding_box.hpp.
{ return intersect(other) ; }
| bounding_box<C,REF_OF(V) >* operator+ | ( | const bounding_box< C, REF_OF(V) > & | other | ) | [inline, inherited] |
Definition at line 104 of file bounding_box.hpp.
{ return unite(other) ; }
| cell2d_voronoi_diagram< C, V >::Point * pair | ( | Point * | p, |
| int & | sgn | ||
| ) | [virtual] |
Implements cell2d< C, V >.
Definition at line 1052 of file cell2d_voronoi_diagram.hpp.
References Cell2d.
{
// std::cout<<(sgn>0?"+": "-")<<" pair of "<< *this<<"("<< p->x()<<","<<p->y()<<")"<<std::endl;
if ( this->is_intersected() )
{
//std::cout<<"Reached Vertex cell "<< *this << " ("<<sgn<<")"<<std::endl;
//std::cout<<"sites are "<< this->m_sites <<std::endl;
//foreach( Point* q, this->intersections() )
//std::cout<< *q<<std::endl;
//Find bisector containing p
unsigned st, cnt(0);
foreach (Cell* mm, this->m_objects)
{
Cell2d* m = dynamic_cast<Cell2d*>(mm);
if ( m->intersections().member(p) )
// foreach( Point* q, m->intersections() )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
{
// p found in bisector m.
//std::cout<< "Current bisector: "<< cnt <<std::endl;
// deduce site from sgn
st=this->site(sgn,cnt);
//std::cout<< "Site is: "<< st <<std::endl;
// jump to a different bisector containing st
unsigned cnt2(0);
foreach (Cell* cc, this->m_objects)
{
Cell2d* c = dynamic_cast<Cell2d*>(cc);
if ( c!=m &&
(st==this->site(1,cnt2) ||
st==this->site(-1,cnt2) ))
{
sgn= this->signof(st,cnt2);
// std::cout<< "New bisector: "<< cnt2 <<std::endl;
// std::cout<< "New sign: "<< sgn <<std::endl;
// std::cout<< "start="<< *(c->starting_point(sgn))<<std::endl;
// std::cout<< "end ="<< *(c->pair(c->starting_point(sgn), sgn )) <<std::endl;
return c->pair(c->starting_point(sgn), sgn );
}
cnt2++;
}
}
cnt++;
}
} else {
Cell2d* c;
foreach (Cell* m, m_objects)
{
c = dynamic_cast<Cell2d*>(m);
if ( c->intersections().member(p) )
// foreach( Point* q, c->intersections() )
// if ( abs(p->x()-q->x())<EPSILON && abs(p->y()-q->y())<EPSILON )
{
//return c->pair(q,sgn);
return c->pair(p,sgn);
}
}
}
std::cout<<"... Cell list pair trouble"<<std::endl;
return NULL;
}
| bool process_singular | ( | ) | [virtual] |
Definition at line 850 of file cell2d_voronoi_diagram.hpp.
References Cell2dAlgebraicCurve, and VSite.
{
// std::cout<<"VD, Inserting singular"<<*this<<std::endl;
// ((voronoi2d<C,V>*)s)->m_singular_cells<< this; // does not work with forward declaration of voronoi2d
// foreach( Point* q, this->intersections() )
// std::cout<< *q<<" adr "<<q<<std::endl;
//CellList* l= new CellList( (BoundingBox)(*this) );
Seq<Cell2dAlgebraicCurve*> l;
Cell2dAlgebraicCurve* cc;
//std::cout<<"compute arrangement of bisectors"<<std::endl;
//More than one bisector in the cell: Compute arrangement
Polynomial p;
for ( unsigned i=0; i< this->m_objects.size(); i++ )
for ( unsigned j=i+1; j< this->m_objects.size(); j++ )
{
p = ((VSite*)(this->m_objects[i]))->m_polynomial ;
p -= ((VSite*)(this->m_objects[j]))->m_polynomial ;
cc= new Cell2dAlgebraicCurve( p, (BoundingBox)(*this), false );
//if ( cc->is_active() ) //commented:Put all curves, even inactive!
l<< cc;
}
this->m_objects.clear();
this->m_objects<< l;
this->is_intersected();
// foreach(Cell * m, this->m_objects) m->insert_singular(s);
return true;
this->m_bisector=true;// ..
//foreach(Cell * m, l ) m->insert_singular(s);
//if (this->m_singular.size()>0 )
// std::cout<<"VORONOI VERTEX COMPUTED in"<< *this <<std::endl;
}
| void push_back | ( | cell< C, V > * | cv, |
| unsigned | k | ||
| ) | [inline] |
Definition at line 104 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_objects, and cell2d_voronoi_diagram< C, V >::m_sites.
| void push_back | ( | cell< C, V > * | cv | ) | [inline] |
Definition at line 98 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_objects, and cell2d_voronoi_diagram< C, V >::m_sites.
| void push_bisector | ( | cell2d_algebraic_curve< C, V > * | cv, |
| Seq< unsigned > | k | ||
| ) | [inline] |
Definition at line 109 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_objects, and cell2d_voronoi_diagram< C, V >::m_sites.
| void set_xmax | ( | double | x | ) | [inline, inherited] |
Definition at line 74 of file bounding_box.hpp.
{ this->m_xmax = x ; }
| void set_xmin | ( | double | x | ) | [inline, inherited] |
Definition at line 73 of file bounding_box.hpp.
{ this->m_xmin = x ; }
| void set_ymax | ( | double | y | ) | [inline, inherited] |
Definition at line 76 of file bounding_box.hpp.
{ this->m_ymax = y ; }
| void set_ymin | ( | double | y | ) | [inline, inherited] |
Definition at line 75 of file bounding_box.hpp.
{ this->m_ymin = y ; }
| void set_zmax | ( | double | z | ) | [inline, inherited] |
Definition at line 78 of file bounding_box.hpp.
{ this->m_zmax = z ; }
| void set_zmin | ( | double | z | ) | [inline, inherited] |
Definition at line 77 of file bounding_box.hpp.
{ this->m_zmin = z ; }
| int side | ( | Point * | p | ) | [inline, inherited] |
Definition at line 140 of file cell2d.hpp.
{
Seq<Point*> all;
int s,i,a;
s = s_intersections.size();
all = this->intersections();
a = all.size();
i = all.search(p);
if (i==-1) return (-1);
else return
( i<s ? 0 :
( i<s+(int)e_intersections.size() ? 1 :
( i<a-(int)w_intersections.size() ? 2 :
3 )));
}
| int signature | ( | int & | i, |
| int & | j | ||
| ) | [inline] |
Definition at line 120 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_sites.
{
int c(0);
for ( int u=0; u<i; u++)
for ( int v=u+1; v<m_sites.size(); v++)
c++;
return c + j-i-1; }
| int signof | ( | unsigned | st, |
| unsigned | bs = 0 |
||
| ) | [inline] |
Definition at line 141 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::count(), cell2d_voronoi_diagram< C, V >::m_objects, and cell2d_voronoi_diagram< C, V >::m_sites.
{
if (this->m_objects.size()==1 )
return ( st==m_sites[0]? -1 :1 );
//std::cout<<"Sgnof " <<st<<"(bs="<<bs<<") on "<< *this<<"objs="<<this->m_objects.size()<<std::endl;
unsigned n=this->count() - 1;
unsigned i,j(0),k(0);
for (i=0;i<=bs;i++)
if ( k<n )
k++ ;
else
j++ ;
if (st==this->m_sites[j]) return (-1);
if (st==this->m_sites[k]) return (1);
std::cout<<"problem at \"signof\" "<<i <<", "<< *this <<"sites= "<<m_sites<<std::endl;
return 0;
};
| unsigned site | ( | int | sgn, |
| unsigned | bs = 0 |
||
| ) | [inline] |
Definition at line 127 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::count(), and cell2d_voronoi_diagram< C, V >::m_sites.
| Seq<unsigned> sites | ( | ) | const [inline] |
Definition at line 164 of file cell2d_voronoi_diagram.hpp.
References cell2d_voronoi_diagram< C, V >::m_sites.
{ return m_sites;};
| double size | ( | void | ) | [inherited] |
| void split_position | ( | int & | v, |
| double & | t | ||
| ) | [virtual] |
| cell2d_voronoi_diagram< C, V >::Point * starting_point | ( | int | sgn | ) | [virtual] |
Implements cell2d< C, V >.
Definition at line 1123 of file cell2d_voronoi_diagram.hpp.
References Cell2d, cell< C, V >::is_active(), and VSite.
Definition at line 907 of file cell2d_voronoi_diagram.hpp.
References Cell2dAlgebraicCurve, mmx::shape_ssi::left(), mmx::shape_ssi::right(), SELF, cell< C, V >::subdivide(), mmx::shape::upper(), VSite, point< C, V, N >::x(), and point< C, V, N >::y().
{
//std::cout<<"Subdividing "<< this << "sites="<<this->m_sites <<std::endl;
typedef SELF Cell_t;
if(v==1) {
left =(Cell*)new Cell_t(this->xmin(), this->xmax(), this->ymin(), c, m_intersected) ;
right=(Cell*)new Cell_t(this->xmin(), this->xmax(), c, this->ymax(), m_intersected) ;
foreach(Point * p, this->m_singular) {
if(p->y() <= c)
((Cell_t*) left)->m_singular << p ;
else
((Cell_t*)right)->m_singular << p ;
}
/* Update neighbors */
this->connect1( (Cell_t*)left, (Cell_t*)right);
((Cell_t*)left)->join1((Cell_t*)right);
} else {//v==0
left = (Cell*)new Cell_t(this->xmin(), c, this->ymin(), this->ymax(), m_intersected) ;
right= (Cell*)new Cell_t(c, this->xmax(), this->ymin(), this->ymax(), m_intersected) ;
foreach(Point * p, this->m_singular) {
if(p->x() <= c )
((Cell_t*)left)->m_singular << p ;
else
((Cell_t*)right)->m_singular << p ;
}
/* Update neighbors */
this->connect0((Cell_t*)left, (Cell_t*)right);
((Cell_t*)left)->join0((Cell_t*)right);
}
/* disconnect parent */
this->disconnect( );
if (!this->is_bisector() )
{
Seq<VSite*> ll, rr;
Cell * cv_left, * cv_right;
foreach(Cell* cv, this->m_objects) {
cv->subdivide( cv_left, cv_right);
ll<< (VSite*)cv_left;
rr<< (VSite*)cv_right;
}
/* Filtering sites that are "far away" */
//1. find minimum upper bound
//2. remove all cells whose lower bound is bigger than that
//std::cout<<"Filtering Cells "<< cv_left<<" , "<<cv_right<<std::endl;
/* Left cell */
double mm;
unsigned cnt;
mm= ( (VSite*)ll.min(this->comp_up) )->upper();
cnt=0;
foreach(VSite* vs, ll)
{
//std::cout<<"check "<< m_sites[cnt]<<std::endl;
if ( !this->over(vs,mm) )
{
((Cell_t*)left)->push_back( vs, m_sites[cnt] );
//std::cout<<"added "<< m_sites[cnt]<<std::endl;
}
cnt++;
//else
//{
//delete vs;
//ll.erase( ll.search(vs) ) ;
//}
}
/* Right cell */
mm= ( (VSite*)rr.min(this->comp_up) )->upper();
cnt=0;
foreach(VSite* vs, rr)
{
if ( !this->over(vs,mm) )
{
((Cell_t*)right)->push_back( vs, m_sites[cnt] );
//((Cell_t*)right)->m_objects<< (Cell*)vs;
}
//else
//{
//delete vs;
//ll.erase( ll.search(vs) ) ;
//}
cnt++;
}
}
else
{//bisector box
Cell * cv_left, * cv_right;
//std::cout<<"bisector subdiv " <<std::endl;
this->m_objects[0]->subdivide( cv_left, cv_right);
((Cell_t*)left)->push_bisector( (Cell2dAlgebraicCurve*)cv_left, m_sites );
((Cell_t*)right)->push_bisector((Cell2dAlgebraicCurve*)cv_right, m_sites );
((Cell_t*)left)->m_bisector=true;
((Cell_t*)right)->m_bisector=true;
}
// std::cout<<"ok " <<std::endl;
}
| virtual void subdivide | ( | cell< C, REF_OF(V) > *& | left, |
| cell< C, REF_OF(V) > *& | right, | ||
| int | v, | ||
| double | s | ||
| ) | [pure virtual, inherited] |
| virtual int subdivide | ( | cell< C, REF_OF(V) > *& | left, |
| cell< C, REF_OF(V) > *& | right | ||
| ) | [virtual, inherited] |
| bounding_box<C,REF_OF(V) >* unite | ( | bounding_box< C, REF_OF(V) > * | other | ) | [inherited] |
| void united | ( | bounding_box< C, REF_OF(V) > * | other | ) | [inherited] |
| bool unites | ( | bounding_box< C, REF_OF(V) > * | other, |
| bool | strict = true |
||
| ) | [inherited] |
| double xmax | ( | void | ) | [inline, inherited] |
Definition at line 56 of file bounding_box.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
{ return m_xmax ; }
| double xmax | ( | void | ) | const [inline, inherited] |
Definition at line 63 of file bounding_box.hpp.
{ return m_xmax ; }
| double xmin | ( | void | ) | [inline, inherited] |
Definition at line 55 of file bounding_box.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
{ return m_xmin ; }
| double xmin | ( | void | ) | const [inline, inherited] |
Definition at line 62 of file bounding_box.hpp.
{ return m_xmin ; }
| double xsize | ( | void | ) | const [inline, inherited] |
Definition at line 69 of file bounding_box.hpp.
| double ymax | ( | void | ) | const [inline, inherited] |
Definition at line 65 of file bounding_box.hpp.
{ return m_ymax ; }
| double ymax | ( | void | ) | [inline, inherited] |
Definition at line 58 of file bounding_box.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
{ return m_ymax ; }
| double ymin | ( | void | ) | const [inline, inherited] |
Definition at line 64 of file bounding_box.hpp.
{ return m_ymin ; }
| double ymin | ( | void | ) | [inline, inherited] |
Definition at line 57 of file bounding_box.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
{ return m_ymin ; }
| double ysize | ( | void | ) | const [inline, inherited] |
Definition at line 70 of file bounding_box.hpp.
| double zmax | ( | void | ) | const [inline, inherited] |
Definition at line 67 of file bounding_box.hpp.
{ return m_zmax ; }
| double zmax | ( | void | ) | [inline, inherited] |
Definition at line 60 of file bounding_box.hpp.
{ return m_zmax ; }
| double zmin | ( | void | ) | [inline, inherited] |
Definition at line 59 of file bounding_box.hpp.
{ return m_zmin ; }
| double zmin | ( | void | ) | const [inline, inherited] |
Definition at line 66 of file bounding_box.hpp.
{ return m_zmin ; }
| double zsize | ( | void | ) | const [inline, inherited] |
Definition at line 71 of file bounding_box.hpp.
Seq<Point *> e_intersections [inherited] |
Definition at line 130 of file cell2d.hpp.
Referenced by cell2d< C, REF_OF(V) >::intersections(), cell2d< C, REF_OF(V) >::nb_intersect(), cell2d< C, REF_OF(V) >::neighbor(), and cell2d< C, REF_OF(V) >::side().
Seq<cell2d *> e_neighbors [inherited] |
Definition at line 171 of file cell2d.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d< C, REF_OF(V) >::is_border(), cell2d< C, REF_OF(V) >::neighbor(), cell2d< C, REF_OF(V) >::neighbors(), voronoi2d< C, V >::run(), topology2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
bool m_bisector [protected] |
Definition at line 174 of file cell2d_voronoi_diagram.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
Definition at line 138 of file cell2d.hpp.
Referenced by voronoi2d< C, V >::run(), and topology2d< C, V >::run().
bool m_intersected [protected] |
Definition at line 173 of file cell2d_voronoi_diagram.hpp.
Definition at line 165 of file cell2d_voronoi_diagram.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d_voronoi_diagram< C, V >::count(), cell2d_voronoi_diagram< C, V >::func(), cell2d_voronoi_diagram< C, V >::intersections(), cell2d_voronoi_diagram< C, V >::push_back(), cell2d_voronoi_diagram< C, V >::push_bisector(), and cell2d_voronoi_diagram< C, V >::signof().
Seq<Point *> m_singular [inherited] |
Definition at line 133 of file cell2d.hpp.
Seq<unsigned> m_sites [protected] |
Definition at line 172 of file cell2d_voronoi_diagram.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d_voronoi_diagram< C, V >::push_back(), cell2d_voronoi_diagram< C, V >::push_bisector(), cell2d_voronoi_diagram< C, V >::signature(), cell2d_voronoi_diagram< C, V >::signof(), cell2d_voronoi_diagram< C, V >::site(), and cell2d_voronoi_diagram< C, V >::sites().
bool m_treated [protected] |
Definition at line 175 of file cell2d_voronoi_diagram.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary().
double m_xmax [protected, inherited] |
Definition at line 107 of file bounding_box.hpp.
double m_xmin [protected, inherited] |
Definition at line 107 of file bounding_box.hpp.
double m_ymax [protected, inherited] |
Definition at line 108 of file bounding_box.hpp.
double m_ymin [protected, inherited] |
Definition at line 108 of file bounding_box.hpp.
double m_zmax [protected, inherited] |
Definition at line 109 of file bounding_box.hpp.
double m_zmin [protected, inherited] |
Definition at line 109 of file bounding_box.hpp.
Seq<Point *> n_intersections [inherited] |
Definition at line 131 of file cell2d.hpp.
Referenced by cell2d< C, REF_OF(V) >::intersections(), cell2d< C, REF_OF(V) >::nb_intersect(), and cell2d< C, REF_OF(V) >::neighbor().
Seq<cell2d *> n_neighbors [inherited] |
Definition at line 172 of file cell2d.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d< C, REF_OF(V) >::is_border(), cell2d< C, REF_OF(V) >::neighbor(), cell2d< C, REF_OF(V) >::neighbors(), voronoi2d< C, V >::run(), topology2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
Seq<Point *> s_intersections [inherited] |
Definition at line 129 of file cell2d.hpp.
Referenced by cell2d< C, REF_OF(V) >::intersections(), cell2d< C, REF_OF(V) >::nb_intersect(), cell2d< C, REF_OF(V) >::neighbor(), and cell2d< C, REF_OF(V) >::side().
Seq<cell2d *> s_neighbors [inherited] |
Definition at line 170 of file cell2d.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d< C, REF_OF(V) >::is_border(), cell2d< C, REF_OF(V) >::neighbor(), cell2d< C, REF_OF(V) >::neighbors(), voronoi2d< C, V >::run(), topology2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().
Seq<Point *> w_intersections [inherited] |
Definition at line 132 of file cell2d.hpp.
Referenced by cell2d< C, REF_OF(V) >::intersections(), cell2d< C, REF_OF(V) >::nb_intersect(), cell2d< C, REF_OF(V) >::neighbor(), and cell2d< C, REF_OF(V) >::side().
Seq<cell2d *> w_neighbors [inherited] |
Definition at line 173 of file cell2d.hpp.
Referenced by cell2d_voronoi_diagram< C, V >::compute_boundary(), cell2d< C, REF_OF(V) >::is_border(), cell2d< C, REF_OF(V) >::neighbor(), cell2d< C, REF_OF(V) >::neighbors(), voronoi2d< C, V >::run(), topology2d< C, V >::run(), semialgebraic2d< C, V >::run(), and arrangement2d< C, V >::run().

