|
shape_doc 0.1
|
|
shape_doc 0.1
|
#include <cell2d_parametric_curve.hpp>
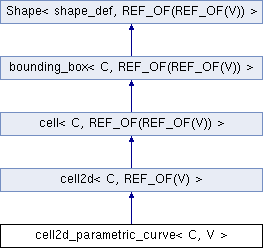
Definition at line 43 of file cell2d_parametric_curve.hpp.
| typedef bounding_box<C, REF_OF(V) > BoundingBox |
Reimplemented from cell2d< C, REF_OF(V) >.
Definition at line 46 of file cell2d_parametric_curve.hpp.
Reimplemented from cell2d< C, REF_OF(V) >.
Definition at line 48 of file cell2d_parametric_curve.hpp.
Reimplemented in cell2d_algebraic_curve< C, V >, and cell2d_voronoi_site2d< C, V >.
Definition at line 63 of file cell2d.hpp.
Reimplemented from cell2d< C, REF_OF(V) >.
Definition at line 49 of file cell2d_parametric_curve.hpp.
Reimplemented from cell2d< C, REF_OF(V) >.
Definition at line 50 of file cell2d_parametric_curve.hpp.
| cell2d_parametric_curve | ( | parametric_curve< C, V > * | curve, |
| const BoundingBox & | bx | ||
| ) |
Definition at line 75 of file cell2d_parametric_curve.hpp.
{
}
| BoundingBox boundingBox | ( | ) | const [inline, inherited] |
Definition at line 88 of file cell.hpp.
{ return (BoundingBox)*this; }
| virtual Point center | ( | void | ) | const [inline, virtual, inherited] |
Definition at line 82 of file cell.hpp.
References bounding_box< C, V >::xmax(), bounding_box< C, V >::xmin(), bounding_box< C, V >::ymax(), bounding_box< C, V >::ymin(), bounding_box< C, V >::zmax(), and bounding_box< C, V >::zmin().
| bool contains | ( | double | x, |
| bool | strict = false |
||
| ) | [inherited] |
| bool contains | ( | double | x, |
| double | y, | ||
| bool | strict = false |
||
| ) | [inherited] |
| bool contains | ( | double | x, |
| double | y, | ||
| double | z, | ||
| bool | strict = false |
||
| ) | [inherited] |
| void disconnect | ( | ) | [inline, inherited] |
| virtual bool insert_regular | ( | Topology * | ) | [inline, virtual] |
Implements cell< C, REF_OF(REF_OF(V)) >.
Definition at line 65 of file cell2d_parametric_curve.hpp.
{ return true; } ;
| virtual bool insert_singular | ( | Topology * | ) | [inline, virtual] |
Implements cell< C, REF_OF(REF_OF(V)) >.
Definition at line 66 of file cell2d_parametric_curve.hpp.
{ return true; } ;
| bounding_box<C,REF_OF(REF_OF(V)) >* intersect | ( | const bounding_box< C, REF_OF(REF_OF(V)) > & | other | ) | [inherited] |
| void intersected | ( | bounding_box< C, REF_OF(REF_OF(V)) > * | other | ) | [inherited] |
| virtual Seq<Point *> intersections | ( | ) | const [inline, virtual, inherited] |
Definition at line 96 of file cell2d.hpp.
References cell2d< C, V >::e_intersections, cell2d< C, V >::n_intersections, cell2d< C, V >::s_intersections, and cell2d< C, V >::w_intersections.
{
Seq<Point *> r;
r<< this->s_intersections;
r<< this->e_intersections;
r<< this->n_intersections.reversed();
r<< this->w_intersections.reversed();
return ( r );
}
| virtual Seq<Point *> intersections | ( | int | i | ) | const [inline, virtual, inherited] |
Definition at line 105 of file cell2d.hpp.
References cell2d< C, V >::e_intersections, cell2d< C, V >::n_intersections, cell2d< C, V >::s_intersections, and cell2d< C, V >::w_intersections.
{
switch(i) {
case 0:
return s_intersections;
case 1:
return e_intersections;
case 2:
return n_intersections.reversed();
case 3:
return w_intersections.reversed();
default:
return (Seq<Point *>());
}
}
| bool intersects | ( | bounding_box< C, REF_OF(REF_OF(V)) > * | other, |
| bool | strict = true |
||
| ) | [inherited] |
| bool is0D | ( | void | ) | const [inline, inherited] |
Definition at line 80 of file bounding_box.hpp.
{ return ((m_xmin == m_xmax) && (m_ymin == m_ymax) && (m_zmin == m_zmax)) ; }
| bool is1D | ( | void | ) | const [inline, inherited] |
Definition at line 81 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin == m_ymax) && (m_zmin == m_zmax)) ; }
| bool is2D | ( | void | ) | const [inline, inherited] |
Definition at line 82 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin != m_ymax) && (m_zmin == m_zmax)) ; }
| bool is3d | ( | void | ) | const [inline, inherited] |
Definition at line 83 of file bounding_box.hpp.
{ return ((m_xmin != m_xmax) && (m_ymin != m_ymax) && (m_zmin != m_zmax)) ; }
| bool is_active | ( | void | ) | [inline, virtual] |
Implements cell< C, REF_OF(REF_OF(V)) >.
Definition at line 58 of file cell2d_parametric_curve.hpp.
{ return true; }
| bool is_border | ( | void | ) | const [inline, inherited] |
Definition at line 121 of file cell2d.hpp.
References cell2d< C, V >::e_neighbors, cell2d< C, V >::n_neighbors, cell2d< C, V >::s_neighbors, and cell2d< C, V >::w_neighbors.
{
return ( this->s_neighbors.size()==0 ||
this->e_neighbors.size()==0 ||
this->n_neighbors.size()==0 ||
this->w_neighbors.size()==0 );
}
| bool is_corner | ( | void | ) | const [inherited] |
| bool is_intersected | ( | void | ) | [inline, virtual] |
Implements cell< C, REF_OF(REF_OF(V)) >.
Definition at line 60 of file cell2d_parametric_curve.hpp.
{ return true; }
| bool is_regular | ( | void | ) | [virtual] |
Implements cell< C, REF_OF(REF_OF(V)) >.
Definition at line 81 of file cell2d_parametric_curve.hpp.
{
return false ;
}
| void join0 | ( | cell2d< C, REF_OF(V) > * | b | ) | [inline, inherited] |
| void join1 | ( | cell2d< C, REF_OF(V) > * | b | ) | [inline, inherited] |
| virtual unsigned nb_intersect | ( | void | ) | const [inline, virtual, inherited] |
Definition at line 89 of file cell2d.hpp.
References cell2d< C, V >::e_intersections, cell2d< C, V >::n_intersections, cell2d< C, V >::s_intersections, and cell2d< C, V >::w_intersections.
Referenced by cell2d_voronoi_site2d< C, V >::is_intersected(), and cell2d_algebraic_curve< C, V >::is_intersected().
{
return (this->n_intersections.size()+
this->s_intersections.size()+
this->e_intersections.size()+
this->w_intersections.size() );
}
Definition at line 175 of file cell2d.hpp.
References cell2d< C, V >::e_intersections, cell2d< C, V >::e_neighbors, cell2d< C, V >::n_intersections, cell2d< C, V >::n_neighbors, cell2d< C, V >::s_intersections, cell2d< C, V >::s_neighbors, cell2d< C, V >::w_intersections, and cell2d< C, V >::w_neighbors.
{
foreach( cell2d *c, this->s_neighbors )
if ( c->n_intersections.member(p) )
{
return c;
}
foreach( cell2d *c, this->e_neighbors )
if ( c->w_intersections.member(p) )
{
return c;
}
foreach( cell2d *c, this->n_neighbors )
if ( c->s_intersections.member(p) )
{
return c;
}
foreach( cell2d *c, this->w_neighbors )
if ( c->e_intersections.member(p) )
{
return c;
}
// Point p on boundary.
//std::cout<<"... Point ("<<p->x()<<","<<p->y()<<") not found on neighbors of "<< this<<"("<<this->neighbors().size() <<")"<<std::endl;
return NULL;
}
| virtual Seq<cell2d *> neighbors | ( | ) | [inline, virtual, inherited] |
Definition at line 162 of file cell2d.hpp.
References cell2d< C, V >::e_neighbors, cell2d< C, V >::n_neighbors, cell2d< C, V >::s_neighbors, and cell2d< C, V >::w_neighbors.
{
Seq<cell2d *> r;
r<< this->s_neighbors;
r<< this->e_neighbors;
r<< this->n_neighbors;
r<< this->w_neighbors;
return ( r ); }
| double operator() | ( | unsigned | v, |
| unsigned | s | ||
| ) | const [inherited] |
| double& operator() | ( | unsigned | v, |
| unsigned | s | ||
| ) | [inherited] |
| bounding_box<C,REF_OF(REF_OF(V)) >* operator* | ( | const bounding_box< C, REF_OF(REF_OF(V)) > & | other | ) | [inline, inherited] |
Definition at line 103 of file bounding_box.hpp.
{ return intersect(other) ; }
| bounding_box<C,REF_OF(REF_OF(V)) >* operator+ | ( | const bounding_box< C, REF_OF(REF_OF(V)) > & | other | ) | [inline, inherited] |
Definition at line 104 of file bounding_box.hpp.
{ return unite(other) ; }
Definition at line 62 of file cell2d_parametric_curve.hpp.
{ return NULL; };
| cell2d_voronoi_site2d< C, V >::Point * pair | ( | Point * | p, |
| int & | sgn | ||
| ) | [pure virtual, inherited] |
Definition at line 585 of file cell2d_algebraic_curve.hpp.
{
// Pair: returns a neighboring point on the component (p,sgn)
// The candidates are the 2 neighbor intersections of p in *this
Seq<Point*> all;
int a;
all= this->intersections();
a = all.size();
if (a==2)// regular cell with a single branch
{ return (all[0]==p ? all[1]: all[0]); }
if (a==1)
{ std::cout<<"Only 1 intersection point in "<< *this <<" (i.e."<<*all[0] <<")"<<std::endl;
// if ( abs( l[0]->x()-this->xmin()<EPSILON) &&
// abs( l[0]->y()-this->ymin()<EPSILON) )
return (p); }
int
s=this->s_intersections.size() ,// ~0
e=this->e_intersections.size() ,// ~1
//n=this->n_intersections.size() ,// ~2
w=this->w_intersections.size() ;// ~3
int j,k,i= all.search(p);
//if (this->is_regular() ) {
if (this->m_singular.size()==0 ) {
Vector grq, grp = this->gradient(*p);
foreach(Point* q, all)
if ( q != p)
{
grq = this->gradient(*q);
if(grp[0]*grq[0]>0 && grp[1]*grq[1]>0 )
return (q);
}
//box has 2 or more "identical" branches
//p is part of critical branch
std::cout<<"...maybe pair Trouble"<< this<<std::endl;
for (int v=0;v<a;v++)
for (int w=v+1;w<a;v++)
{
grp= this->gradient(*all[v]);
grq= this->gradient(*all[w]);
if( grp[0]*grq[0]>0 && grp[1]*grq[1]>0 )
{
for (int u=0; u<a;u++)
if ( u!=v && u!=w && all[u]!=p )
return (all[u]);
}
}
std::cout<<"empty BOX:("<<this->m_singular.size()<<",a="<<a<<")"<<this <<std::endl;
foreach(Point*v,all) {
Vector gr= this->gradient(*v);
//std::cout<<"("<<v->x()<<","<<v->y()<<"): ";
std::cout<<(gr[0]>0?1:-1)<<","<<(gr[1]>0?1:-1) <<std::endl;
}
//look non-tangent direction
foreach(Point* q, all)
if ( q != p)
{
grq = this->gradient(*q);
if( abs(grp[0]) < 0.017)
{ if (grp[1]*grq[1]>0)
return (q);
}
else if ( abs(grp[1])< 0.01)
{ if (grp[0]*grq[0]>0)
return (q);
}
}
std::cout<<"...pair Trouble"<< this<<std::endl;
// foreach(Point* q, all)
// if ( q != p)
// {
return (all[0]);
// }
}
else {//singular box
//std::cout<< "SBOX: " <<this <<std::endl;
//std::cout<< " " <<all <<std::endl;
//for (unsigned y=0;y<4;y++)
//std::cout<<y <<": ("<<all[y]->x()<<","<<all[y]->y()<<")"<<std::endl;
// Cell with 1 self-intersection
int ev(0);
int u, v;//side of p, ln resp.
j= ( i!=0 ? i-1 : a-1 );
k= ( i!=a-1 ? i+1 : 0 );
//std::cout<<"j,i,k (left,p,right)="<<j <<" "<<i << " "<<k<< std::endl;
Point *ln= all[j],
*rn= all[k] ;
//std::cout<<"i= "<< i<<", j=" <<j<< std::endl;
// std::cout<<"("<<a<<")"<<s<<", "<<e<<", "<<n<<", "<<w<< std::endl;
u= ( i<s ? 0 :
( i<s+e ? 1 :
( i<a-w ? 2 :
3 )));
v= ( j<s ? 0 :
( j<s+e ? 1 :
( j<a-w ? 2 :
3 )));
int * sz = this->m_polynomial.rep().szs();
int * st = this->m_polynomial.rep().str();
switch (u){
case 0:
ev= (this->m_polynomial[0] >0 ? 1:-1);
if (v==0 && j%2==0) // p, ln on the same face
ev*=-1;
break;
case 1:
ev= (this->m_polynomial[(sz[0]-1)*st[0]] >0 ? 1:-1);
if (v==1 && (j-s)%2==0) // p, ln on the same face
ev*=-1;
break;
case 2:
ev= (this->m_polynomial[sz[0]*sz[1]-1]>0 ? 1:-1);
if (v==2 && (j-s-e)%2==0) // p, ln on the same face
ev*=-1;
break;
case 3:
ev= (this->m_polynomial[(sz[1]-1)*st[1]] >0 ? 1:-1);
if (v==3 && (j-a+w)%2==0) // p, ln on the same face
ev*=-1;
break;
}
// std::cout<<"Cell"<<this <<"("<<(sgn==1 ? "+": "-")<<")" <<std::endl;
// std::cout<<"u= "<< u<<", v=" <<v<<", ev=" <<ev << std::endl;
// std::cout<<"ln= "<< ln->x()<<","<<ln->y() << std::endl;
// std::cout<<"p = "<< p->x()<<","<<p->y() << std::endl;
// std::cout<<"rn= "<< rn->x()<<","<<rn->y() << std::endl;
// if (ev*sgn>0) std::cout<<"result is ln"<< std::endl;
// else std::cout<<"result is rn"<< std::endl;
if (ev*sgn>0) return ln;
else return rn;
}
}
| void set_xmax | ( | double | x | ) | [inline, inherited] |
Definition at line 74 of file bounding_box.hpp.
{ this->m_xmax = x ; }
| void set_xmin | ( | double | x | ) | [inline, inherited] |
Definition at line 73 of file bounding_box.hpp.
{ this->m_xmin = x ; }
| void set_ymax | ( | double | y | ) | [inline, inherited] |
Definition at line 76 of file bounding_box.hpp.
{ this->m_ymax = y ; }
| void set_ymin | ( | double | y | ) | [inline, inherited] |
Definition at line 75 of file bounding_box.hpp.
{ this->m_ymin = y ; }
| void set_zmax | ( | double | z | ) | [inline, inherited] |
Definition at line 78 of file bounding_box.hpp.
{ this->m_zmax = z ; }
| void set_zmin | ( | double | z | ) | [inline, inherited] |
Definition at line 77 of file bounding_box.hpp.
{ this->m_zmin = z ; }
| int side | ( | Point * | p | ) | [inline, inherited] |
Definition at line 140 of file cell2d.hpp.
References cell2d< C, V >::e_intersections, cell2d< C, V >::intersections(), cell2d< C, V >::s_intersections, and cell2d< C, V >::w_intersections.
{
Seq<Point*> all;
int s,i,a;
s = s_intersections.size();
all = this->intersections();
a = all.size();
i = all.search(p);
if (i==-1) return (-1);
else return
( i<s ? 0 :
( i<s+(int)e_intersections.size() ? 1 :
( i<a-(int)w_intersections.size() ? 2 :
3 )));
}
| double size | ( | void | ) | [inherited] |
| virtual void split_position | ( | int & | v, |
| double & | t | ||
| ) | [virtual, inherited] |
Implements cell< C, REF_OF(REF_OF(V)) >.
| virtual Point* starting_point | ( | int | sgn | ) | [inline, virtual] |
Implements cell2d< C, REF_OF(V) >.
Definition at line 63 of file cell2d_parametric_curve.hpp.
{ return NULL; };
Definition at line 87 of file cell2d_parametric_curve.hpp.
{
// double xc = (bx->xmin()+bx->xmax())/2 ;
// double yc = (bx->ymin()+bx->ymax())/2 ;
// SELF * nw = new SELF();//bx->xmin(), xc, yc, bx->ymax()) ;
// SELF * ne = new SELF();//xc, bx->xmax(), yc, bx->ymax()) ;
// SELF * sw = new SELF();//bx->xmin(), xc, bx->ymin(), yc) ;
// SELF * se = new SELF();//xc, bx->xmax(), bx->ymin(), yc) ;
// foreach(point * p, n_intersections) {
// if(p->x() <= xc) nw->northIntersectionpoints() << p ;
// if(p->x() > xc) ne->northIntersectionpoints() << p ;
// }
// foreach(point * p, s_intersections) {
// if(p->x() <= xc) sw->southIntersectionpoints() << p ;
// if(p->x() > xc) se->southIntersectionpoints() << p ;
// }
// foreach(point * p, w_intersections) {
// if(p->y() <= yc) sw->westIntersectionpoints() << p ;
// if(p->y() > yc) nw->westIntersectionpoints() << p ;
// }
// foreach(point * p, e_intersections) {
// if(p->y() <= yc) se->eastIntersectionpoints() << p ;
// if(p->y() > yc) ne->eastIntersectionpoints() << p ;
// }
// foreach(point * p, m_critical) {
// if(p->x() <= xc && p->y() <= yc) sw->criticalpoints() << p ;
// if(p->x() <= xc && p->y() > yc) nw->criticalpoints() << p ;
// if(p->x() > xc && p->y() <= yc) se->criticalpoints() << p ;
// if(p->x() > xc && p->y() > yc) ne->criticalpoints() << p ;
// }
// foreach(point * p, m_extremal) {
// if(p->x() <= xc && p->y() <= yc) sw->extermalpoints() << p ;
// if(p->x() <= xc && p->y() > yc) nw->extermalpoints() << p ;
// if(p->x() > xc && p->y() <= yc) se->extermalpoints() << p ;
// if(p->x() > xc && p->y() > yc) ne->extermalpoints() << p ;
// }
// foreach(point * p, m_singular) {
// if(p->x() <= xc && p->y() <= yc) sw->singularpoints() << p ;
// if(p->x() <= xc && p->y() > yc) nw->singularpoints() << p ;
// if(p->x() > xc && p->y() <= yc) se->singularpoints() << p ;
// if(p->x() > xc && p->y() > yc) ne->singularpoints() << p ;
// }
// cells << (Cell *)nw ; cells << (Cell *)ne ;
// cells << (Cell *)sw ; cells << (Cell *)se ;
}
| virtual void subdivide | ( | cell< C, REF_OF(REF_OF(V)) > *& | left, |
| cell< C, REF_OF(REF_OF(V)) > *& | right, | ||
| int | v, | ||
| double | s | ||
| ) | [pure virtual, inherited] |
| virtual int subdivide | ( | cell< C, REF_OF(REF_OF(V)) > *& | left, |
| cell< C, REF_OF(REF_OF(V)) > *& | right | ||
| ) | [virtual, inherited] |
| bounding_box<C,REF_OF(REF_OF(V)) >* unite | ( | bounding_box< C, REF_OF(REF_OF(V)) > * | other | ) | [inherited] |
| void united | ( | bounding_box< C, REF_OF(REF_OF(V)) > * | other | ) | [inherited] |
| bool unites | ( | bounding_box< C, REF_OF(REF_OF(V)) > * | other, |
| bool | strict = true |
||
| ) | [inherited] |
| double xmax | ( | void | ) | [inline, inherited] |
Definition at line 56 of file bounding_box.hpp.
{ return m_xmax ; }
| double xmax | ( | void | ) | const [inline, inherited] |
Definition at line 63 of file bounding_box.hpp.
{ return m_xmax ; }
| double xmin | ( | void | ) | const [inline, inherited] |
Definition at line 62 of file bounding_box.hpp.
{ return m_xmin ; }
| double xmin | ( | void | ) | [inline, inherited] |
Definition at line 55 of file bounding_box.hpp.
{ return m_xmin ; }
| double xsize | ( | void | ) | const [inline, inherited] |
Definition at line 69 of file bounding_box.hpp.
| double ymax | ( | void | ) | [inline, inherited] |
Definition at line 58 of file bounding_box.hpp.
{ return m_ymax ; }
| double ymax | ( | void | ) | const [inline, inherited] |
Definition at line 65 of file bounding_box.hpp.
{ return m_ymax ; }
| double ymin | ( | void | ) | [inline, inherited] |
Definition at line 57 of file bounding_box.hpp.
{ return m_ymin ; }
| double ymin | ( | void | ) | const [inline, inherited] |
Definition at line 64 of file bounding_box.hpp.
{ return m_ymin ; }
| double ysize | ( | void | ) | const [inline, inherited] |
Definition at line 70 of file bounding_box.hpp.
| double zmax | ( | void | ) | [inline, inherited] |
Definition at line 60 of file bounding_box.hpp.
{ return m_zmax ; }
| double zmax | ( | void | ) | const [inline, inherited] |
Definition at line 67 of file bounding_box.hpp.
{ return m_zmax ; }
| double zmin | ( | void | ) | [inline, inherited] |
Definition at line 59 of file bounding_box.hpp.
{ return m_zmin ; }
| double zmin | ( | void | ) | const [inline, inherited] |
Definition at line 66 of file bounding_box.hpp.
{ return m_zmin ; }
| double zsize | ( | void | ) | const [inline, inherited] |
Definition at line 71 of file bounding_box.hpp.
Seq<Point *> e_intersections [inherited] |
Definition at line 130 of file cell2d.hpp.
Referenced by cell2d_algebraic_curve< C, V >::cell2d_algebraic_curve().
Seq<cell2d *> e_neighbors [inherited] |
Definition at line 171 of file cell2d.hpp.
Definition at line 138 of file cell2d.hpp.
Seq<Point *> m_singular [inherited] |
Definition at line 133 of file cell2d.hpp.
Referenced by cell2d_algebraic_curve< C, V >::cell2d_algebraic_curve().
double m_xmax [protected, inherited] |
Definition at line 107 of file bounding_box.hpp.
double m_xmin [protected, inherited] |
Definition at line 107 of file bounding_box.hpp.
double m_ymax [protected, inherited] |
Definition at line 108 of file bounding_box.hpp.
double m_ymin [protected, inherited] |
Definition at line 108 of file bounding_box.hpp.
double m_zmax [protected, inherited] |
Definition at line 109 of file bounding_box.hpp.
double m_zmin [protected, inherited] |
Definition at line 109 of file bounding_box.hpp.
Seq<Point *> n_intersections [inherited] |
Definition at line 131 of file cell2d.hpp.
Referenced by cell2d_algebraic_curve< C, V >::cell2d_algebraic_curve().
Seq<cell2d *> n_neighbors [inherited] |
Definition at line 172 of file cell2d.hpp.
Seq<Point *> s_intersections [inherited] |
Definition at line 129 of file cell2d.hpp.
Referenced by cell2d_algebraic_curve< C, V >::cell2d_algebraic_curve().
Seq<cell2d *> s_neighbors [inherited] |
Definition at line 170 of file cell2d.hpp.
Seq<Point *> w_intersections [inherited] |
Definition at line 132 of file cell2d.hpp.
Referenced by cell2d_algebraic_curve< C, V >::cell2d_algebraic_curve().
Seq<cell2d *> w_neighbors [inherited] |
Definition at line 173 of file cell2d.hpp.

