Origin: D. Cox, Ideals, Varieties and Algorithms,
Springer-Verlag, 1992
10 equations for 8 unknowns defined by:
2*x1-2=0 2*x2-1=0 2*x3-2=0 2*x4-1=0 2*x5-x6=0 x5+2*x6-2=0 (x1-x7)^2+x8^2-x7^2-(x8-x2)^2=0 (x1-x7)^2+x8^2-(x3-x7)^2-(x4-x8)^2=0 x1^2+x2^2-2*x1*x7+2*x2*x8=0 x1^2-x3^3-x4^2-2*x7*(x1-x3)+2*x4*x8=0Ranges: for all unknowns [-1e8,1e8]
Solving method: GradientSolve+HullConsistencyStrong+
SimplexConsistency+3B
Solutions:: 0
Computation time (May 2004):
| DELL D400 (1.7Ghz) | 0s |
Origin: [1]
9 equations with 9 variables defined by:
(z1-6)^2+z2^2+z3^2-104=0 z4^2+(z5-6)^2+z6^2-104=0 z7^2+(z8-12)^2+(z9-6)^2-80=0 z1*(z4-6)+z5*(z2-6)+z3*z6-52=0 z1*(z7-6)+z8*(z2-12)+z9*(z3-6)+64=0 z4*z7+z8*(z5-12)+z9*(z6-6)-6*z5+32=0 2*z2+2*z3-2*z6-z4-z5-z7-z9+18=0 z1+z2+2*z3+2*z4+2*z6-2*z7+z8-z9-38=0 z1+z3+z5-z6+2*z7-2*z8-2*z4+8=0Ranges: for all unknowns [-1e8,1e8]
Solving method: GradientSolve+HullConsistencyStrong+
SimplexConsistency+3B
Solutions:: 8 (exact)
Computation time (May 2004):
| Sun Blade | 195s |
| DELL D400 (1.7Ghz) | 21s |
Origin: COCONUT
3 equations defined by:
x^2 + y^2 + z^2 - 36=0 x+y - z=0 x*y + z^2 - 1=0Ranges: for all unknowns [-1e8,1e8]
Solving method: GradientSolve+HullConsistencyStrong+3B
Solutions:: 4 (exact)
Computation time (May 2004)
| DELL D400 (1.7 GHz) | 0.01s |
Origin: [9]
n equations defined by:
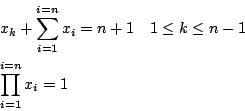
Ranges: for all unknowns [-1e8,1e8]
Solving method: SolveSimplexGradient+HullConsistency+3B
Solutions:: 3 for n=5, 2 for n=30 (exact)
Computation time (April 2003):
| Sun Blade | 1.23s (n=5), 9mn (n=30) |
Origin: [9]
n equations defined by:
Ranges: for all unknowns [-100,100]
Solving method: HessianSolve+HullConsistencyStrong+3B
Solutions:: 1 for n=10, n=30 (exact)
Computation time:
| Evo 410C (1.2GHz) | 0.76s (n=10), 11mn (n=30) (April 2003) |
| DELL D400 (1.7Ghz) | 0.76s (n=10), 130s (n=30) (May 2004) |
Origin: [9]
n equations defined by:
Ranges: for all unknowns [-100,100]
Solving method: GradientSolve+HullConsistencyStrong+ 3B
Solutions:: 2 for n=10, 2 for n=30 (exact)
Computation time:
| Evo 410C (1.2GHz) | 0.55s (n=10), 112.98s (n=30) (April 2003) |
| DELL D400 (1.7GHz) | 0.24s (n=10), 26.14s (n=30) (May 2004) |
Origin: FRISCO
4 equations
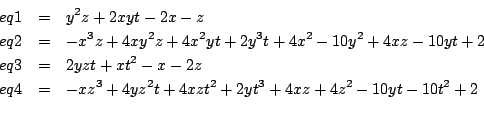
y^2 z+2 x y t-2 x-z=0 -x^3 z+4 x y^2 z+4 x^2 y t+2 y^3 t+4 x^2-10 y^2+4 x z-10 y t+2=0 &2 y z t+x t^2-x-2 z=0 -x z^3+4 y z^2 t+4 x z t^2+2 y t^3+4 x z+4 z^2-10 y t-10 t^2+2=0Ranges: for all unknowns [-10,10]
| Sun Blade | 30.15s |
| EVO 410C (1.2Ghz) | 6.71s |
Origin: FRISCO
3 equations

-6 p^3+4 p^3 phi^3+15 phi^3 s^3 p-3 phi^3 s^5-12 phi^3 s p^2 -3 phi^3 s p+phi^3 s^3=0 -9 phi^3 s^2 p-5 phi^3 s^2-6 s p^3+3 phi^3 s^4+5 phi^3 p=0 -12 s^2 p-6 s^2+3 s^4+4 phi^2+3+12 p=0
| Unknown | Range |
| p | [0.001,1000] |
| s | [0.001,1000] |
| phi | [0.001,1000] |
| Sun Blade | 9.69s (April 2003) |
| EVO 410C (1.2Ghz) | 2.43s (April 2003) |
| DELL D400 (1.7Ghz) | 0.75s (May 2004) |
Origin: COCONUT
5 equations defined by:
3*y5 - y1*(y2 + 1)=0 y2*(2*y1 + y3^2 + r8 + 2*r10*y2 + r7*y3 + r9*y4) +y1 - r*y5=0 y3*(2*y2*y3 + 2*r5*y3 + r6 + r7*y2) - 8*y5=0 y4*(r9*y2 + 2*y4) - 4*r*y5=0 y2*(y1+r10*y2+y3^2+r8+r7*y3+r9*y4)+y1+r5*y3^2+y4^2-1+r6*y3=0with
r = 10 r5 = 0.193 r6 = 0.002597/sqrt(40.) r7 = 0.003448/sqrt(40.) r8 = 0.00001799/40. r9 = 0.0002155/sqrt(40.) r10= 0.00003846/40.Ranges: for all unknowns [0,1e8] or [-1e8,1e8]
Solving method: GradientSolve+HullConsistencyStrong+3B
Solutions:: 1 for range [0,1e8], 4 for range [-1e8,1e8] (exact)
Computation time (May 2004):
| DELL D400 (1.7 GHz) | 0.05s (range =[0,1e8]), 0.5s (range =[-1e8,1e8]) |
Origin: Kearfott, COCONUT
4 equations defined by:
x1^2 - x2 =0 x4^2 - x3 =0 2.177e7*x2 - 1.697e7*x2*x4 + 0.55*x1*x4 + 0.45*x1 - x4=0 1.585e14*x2*x4 + 4.126e7*x1*x3 - 8.282e6*x1*x4 + 2.284e7*x3*x4 - 1.918e7*x3 + 48.4*x4 - 27.73=0Ranges: for all unknowns [0,1]
Solving method: GradientSolve+HullConsistencyStrong+3B
Solutions:: 1 (exact)
Computation time (May 2004): will almost not change if the
search space is extended to [-1e8,1e8]:
| DELL D400 (1.7 GHz) | 0.01s |
Origin: [8]
n equations, a = 1/2
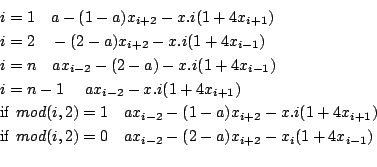
Solving method: HessianSolve+HullConsistency+
3B
Solutions:: 18 (n=10), 38 (n=20) (exact)
Computation time:
| Evo 410C (1.2GHz) | 6.52s (n=10) 1039.75s (n=20)(April 2003) |
| DELL D400 (1.7Ghz) (1.2GHz) | 3.22s (n=10) 570s (n=20)(May 2004) |
Origin: FRISCO
3 equations defined by:
-y^2*z^2-y^2+24*y*z-z^2-13=0 -x^2*z^2-x^2+24*x*z-z^2-13=0 -x^2*y^2-x^2+24*x*y-y^2-13=0Ranges: for all unknowns [0,100000]
| Sun Blade | 2.11s |
| EVO 410C (1.2Ghz) | 0.38s |
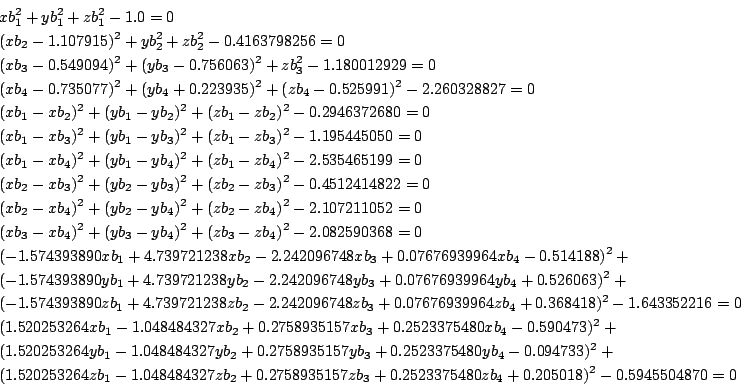
Origin: Dietmaier [4]
Physical meaning: forward kinematics of a parallel robot. Six
points in a known position are chosen on two
rigid bodies M1, M2. The set of points on M1 is A1,A2,..A6 and
B1,B2,..B6 on M2. The distance between the 6 pairs (Ai,Bi) is known
and the purpose of the system is to determine the possible location of
M2 with respect to M2 (it can be shown that there will be at most 40
solutions)
12 equations:
xb_1^2+yb_1^2+zb_1^2- 1.0=0
(xb_2- 1.107915)^2+yb_2^2+zb_2^2- 0.4163798256=0
(xb_3- 0.549094)^2+(yb_3-0.756063)^2+zb_3^2- 1.180012929=0
(xb_4- 0.735077)^2+(yb_4+0.223935)^2+(zb_4- 0.525991)^2- 2.260328827=0
(xb_1-xb_2)^2+(yb_1-yb_2)^2+(zb_1-zb_2)^2- 0.2946372680=0
(xb_1-xb_3)^2+(yb_1-yb_3)^2+(zb_1-zb_3)^2- 1.195445050=0
(xb_1-xb_4)^2+(yb_1-yb_4)^2+(zb_1-zb_4)^2- 2.535465199=0
(xb_2-xb_3)^2+(yb_2-yb_3)^2+(zb_2-zb_3)^2- 0.4512414822=0
(xb_2-xb_4)^2+(yb_2-yb_4)^2+(zb_2-zb_4)^2- 2.107211052=0
(xb_3-xb_4)^2+(yb_3-yb_4)^2+(zb_3-zb_4)^2- 2.082590368=0
(- 1.574393890 xb_1+ 4.739721238 xb_2- 2.242096748 xb_3+ 0.07676939964 xb_4- 0.514188)^2+(- 1.574393890 yb_1+ 4.739721238 yb_2- 2.242096748 yb_3+0.07676939964 yb_4+ 0.526063)^2+(- 1.574393890 zb_1+ 4.739721238 zb_2- 2.242096748 zb_3+ 0.07676939964 zb_4+ 0.368418)^2- 1.643352216=0
( 1.520253264 xb_1- 1.048484327 xb_2+ 0.2758935157 xb_3+ 0.2523375480 xb_4- 0.590473)^{2}+( 1.520253264 yb_1- 1.048484327 yb_2+ 0.2758935157 yb_3+ 0.2523375480 yb_4- 0.094733)^2+( 1.520253264 zb_1- 1.048484327 zb_2+ 0.2758935157 zb_3+0.2523375480 zb_4+ 0.205018)^2- 0.5945504870=0
Unknowns:
Ranges: may be chosen arbitrary large without any change in the
computation time
Solving method: SolveDistance
Solutions:: 40 (exact)
Computation time (April 2003):
| EVO 410C (1.2Ghz) | 22s |
Origin: COCONUT, modified by COPRIN (original problem: see Dipole)
4 equations defined by:
a+b=0.63254 c+d =-1.34534 t*a+u*b-v*c-w*d=-0.8365348 v*a+w*b+t*c+u*d=1.7345334 a*t**2-a*v**2-2*c*t*v+b*u**2-b*w**2-2*d*u*w=1.352352 c*t**2-c*v**2+2*a*t*v+d*u**2-d*w**2+2*b*u*w=-0.843453 a*t**3-3*a*t*v**2+c*v**3-3*c*v*t**2+b*u**3-3*b*u*w**2+d*w**3-3*d*w*u**2= -0.9563453 c*t**3-3*c*t*v**2-a*v**3+3*a*v*t**2+ d*u**3-3*d*u*w**2-b*w**3+3*b*w*u**2=1.2342523The 4 first equations are linear in
| Dell D620 (1.7Ghz) | 69.72s |
Origin: [9]
n equations defined with h=1/(n+1), ti = ih
Ranges: for all unknowns [-100,100]
Solving method: HessianSolve+HullConsistency+3B
Solutions:: 1 for n=20, 1 for n=40 (exact)
Computation time (April 2003):
| Evo 410C (1.2Ghz) | 1.13s (n=20), 22.92s (n=40) |
Origin: [9]
n equations defined with h=1/(n+1), ti = ih
![\begin{displaymath}
x_i+h [\sum_{j=1}^{j=i}t_j(x_j+t_j+1)^3+\sum_{j=i+1}^{j=n}(1-t_j)(x_j+t_j+1)^3]
\end{displaymath}](img15.png)
Ranges: for all unknowns [-100,100]
Solving method: HessianSolve+HullConsistency+3B
(until May 2004),
GlobalConsistencyTaylor, IntervalNewton and special 2B (2007)
Solutions:: 3 for n=5, 8,9,20, 1 for n=1,7,10,11 (exact)
Computation time:
| Evo 410C (1.2GHz) | 40.46s (n=5), 915.97s (n=6) (April 2003) |
| DELL D400 (1.7 GHz) | 5.63s (n=5), 105.47s (n=6) (May 2004) |
| Cluster (11 PC's) | 3776s (n=7) (April 2003) |
| DELL D620 (1.7Ghz) | 0.027s (n=5), 0.032s(n=6), 0.045s(n=7), 1.15s (n=8), 1.39s (n=9), 2.58s (n=10), 2.98s (n=11), 1mn42s (n=20) |
Note that until 2007 this system was considered as a difficult one
This system may be changed into another system of 2n equations in the unknowns y1..yn,x1..xn defined by:
![\begin{eqnarray*}
&&x_j=(y_j+t_j+1)^3\\
&&y_j+h [\sum_{j=1}^{j=i}t_jx_j+\sum_{j=i+1}^{j=n}(1-t_j)x_j]\\
\end{eqnarray*}](img16.png)
Ranges: for all yj [-100,100], for all xj [-1000000,1000000]
Solving method: HessianSolve+HullConsistency+
SimplexConsistency+3B
Solutions:: 1 for n=6, 1 for n=20 (exact)
Computation time (April 2003):
| Evo 410C (1.2Ghz) | 7.7s (n=6), 375.8s (n=20) |
Origin: COCONUT [13]
8 equations with 8 unknowns:
x1 + x2*(x1 + x3) + x4*(x3 + x5) + x6*(x5 + x7) -( x8*((1/8) - x7))=0 x2 + x3*(x1 + x5) + x4*(x2 + x6) + x5*x7 -( x8*((2/8) - x6))=0 x3*(1 + x6) + x4*(x1 + x7) + x2*x5 -( x8*((3/8) - x5))=0 x4 + x1*x5 + x2*x6 + x3*x7 -( x8*((4/8) - x4))=0 x5 + x1*x6 + x2*x7 -( x8*((5/8) - x3))=0 x6 + x1*x7 -( x8*((6/8) - x2))=0 x7 -( x8*((7/8) - x1))=0 x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 +1=0Ranges: [-100,100] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 16 (exact)
Computation time (May 2004):
| DELL D400 (1.7 Ghz) | 208s |
Origin: [6]
6 equations
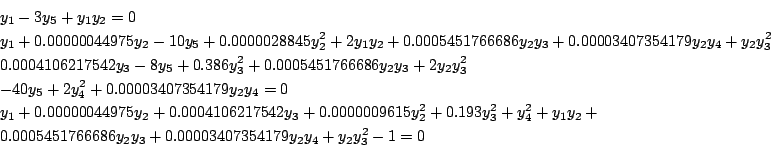
y_1-3 y_5+y_1 y_2 y_1+0.00000044975 y_2-10 y_5+0.0000028845 y_2^2+2 y_1y_2+ 0.0005451766686 y_2 y_3+0.00003407354179 y_2 y_4+y_2y_3^2 0.0004106217542 y_3-8 y_5+0.386 y_3^2+0.0005451766686 y_2y_3+2 y_2y_3^2 -40 y_5+2 y_4^2+0.00003407354179 y_2y_4 y_1+0.00000044975 y_2+0.0004106217542 y_3+0.0000009615y_2^2+ 0.193 y_3^2+y_4^2+y_1y_2+0.0005451766686 y_2 y_3+0.00003407354179 y_2y_4+y_2y_3^2-1Ranges: [-1e8,1e8] for all unknowns
Solving method: HessianSolve+HullConsistency+
SimplexConsistency+3B
Solutions:: 4 (exact)
Computation time (April 2003):
| Evo 410C (1.2Ghz) | 2s |
Origin: [8]
Physical meaning: none
n equations:

Ranges: [-1e8,1e8] for all unknowns
Solving method: HessianSolve+HullConsistency+3B
Solutions:: 1 (exact)
Computation time (April 2003):
| EVO 410C (1.2Ghz) | 5.2s (n=20) |
Origin: [8]
n=4m equations:
Ranges: [-1e8,1e8]
Solving method: HessianSolve+HullConsistency+3B
Solutions:: 4 (n=16) (approximate)
Computation time (April 2003):
| Evo 410C (1.2Ghz) | 3.33s (n=16) |
Origin: [8]
n=4m equations:
Ranges: [-1e8,1e8]
Solving method: HessianSolve+HullConsistency+
3B + IntervalNewton (since May 2007)
Solutions:: 3 (n=4), 9 (n=8), 27 (n=12), 81 (n=16) (exact)
Computation time
| Evo 410C (April 2003): (1.2Ghz) | 4.41s (n=4), 269.29s (n=8) |
| DELL 620 (May 2007) (1.7GHz) | 21.16s (n=8), 3mn5s (n=12), 38mn8s (n=16) |
0.01692601*X1^2*Y1^2 - 0.888509280014*X1^2*Y2^2 + 0.0411717692438*X2^2*Y1^2 - 0.00437457395884*X2^2*Y2^2 + 0.331480641249*X1*X2*Y1^2 - 1.38036964668*X1*X2*Y2^2 - 0.270492270191*X1^2*Y1*Y2 + 1.44135801774*X2^2*Y1*Y2 + 0.859888946812*X1*X2*Y1*Y2 + 0.0791489659197*X1^2*Y1 - 0.00336032777032*X1^2*Y2 - 0.0620826738427*X1*Y1^2 + 0.501879647495*X1*Y2^2 + 0.647156236961*X2^2*Y1 + 0.0926311741907*X2^2*Y2 - 0.255000006226*X2*Y1^2 - 0.0896892386081*X2*Y2^2 - 0.568007271041*X1*X2*Y2 + 0.095991501961*X1*X2*Y1 + 0.165310767618*X1*Y1*Y2 - 0.563962321337*X2*Y1*Y2 - 0.0784871167595*X1*Y1 - 0.0784871167595*X2*Y2 + 0.011807283256*X1*Y2 - 0.011807283256*X2*Y1 + 0.0422876985355*X1^2 + 0.0422876985355*X2^2 + 0.0372427422943*Y1^2 + 0.0372427422943*Y2^2=0 0.518178672335*X1^2*Y1^2 - 0.0414464807343*X1^2*Y2^2 + 2.63600135179*X2^2*Y1^2 - 0.799490472298*X2^2*Y2^2 + 0.29442805494*X1^2*Y1*Y2 + 1.46551534655*X2^2*Y1*Y2 - 0.631878110759*X1*X2*Y1^2 - 1.80296540237*X1*X2*Y2^2 - 2.87586667102*X1*X2*Y1*Y2 - 0.987856648177*X1^2*Y1 - 0.530579106676*X1^2*Y2 - 0.0397576281649*X1*Y1^2 + 0.317719102869*X1*Y2^2 - 1.93710490787*X2^2*Y1 + 0.00127693327315*X2^2*Y2 - 0.581380074072*X2*Y1^2 - 0.0672137066743*X2*Y2^2 + 0.531856039949*X1*X2*Y1 + 0.949248259696*X1*X2*Y2 + 0.514166367398*X1*Y1*Y2 - 0.357476731033*X2*Y1*Y2 + 0.140965913657*X1*Y1 + 0.140965913657*X2*Y2 - 0.153347218606*X1*Y2 + 0.153347218606*X2*Y1 + 0.283274882058*X1^2 + 0.283274882058*X2^2 + 0.0382903330079*Y1^2 + 0.0382903330079*Y2^2 =0 0.0233560008057*X1^2*Y1^2 - 0.00428427501149*X1^2*Y1*Y2 - 0.792756311827*X1^2*Y2^2 + 0.0492185850289*X2^2*Y2^2 + 0.0759264856293*X1*X2*Y1^2 + 1.14839711492*X1*X2*Y1*Y2 - 0.283066217262*X2^2*Y1^2 + 0.460041521291*X2^2*Y1*Y2 - 0.388399310674*X1*X2*Y2^2 - 0.0561169736293*X1*Y1^2 + 0.485064247792*X1*Y2^2 + 0.0689567235492*X1^2*Y1 - 0.115620658768*X1^2*Y2 - 0.13286905328*X2*Y1^2 - 0.084375901147*X2*Y2^2 + 0.639964831612*X2^2*Y1 + 0.101386684276*X2^2*Y2 + 0.217007343044*X1*X2*Y1 - 0.571008108063*X1*X2*Y2 + 0.0484931521334*X1*Y1*Y2 - 0.541181221422*X2*Y1*Y2 - 0.00363197918253*X1*Y2 + 0.00363197918253*X2*Y1 - 0.0781302968652*X1*Y1 - 0.0781302968652*X2*Y2 + 0.0471311092612*X1^2 + 0.0471311092612*X2^2 + 0.0324495575052*Y1^2 + 0.0324495575052*Y2^2 ; 0.393707415641*X1^2*Y1^2 + 0.59841456862*X1^2*Y2^2 + 0.0735854940135*X2^2*Y1^2 + 0.0548997238169*X2^2*Y2^2 + 0.0116156836985*X1^2*Y1*Y2 + 0.0699694273575*X2^2*Y1*Y2 - 0.305757340849*X1*X2*Y1^2 - 0.364111084508*X1*X2*Y2^2 - 0.223392923175*X1*X2*Y1*Y2 + 0.0996725944534*X1^2*Y1 + 0.0113936468426*X1^2*Y2 - 0.381205205249*X1*Y1^2 - 0.473402150235*X1*Y2^2 - 0.0213613191759*X2^2*Y1 - 0.0372595571271*X2^2*Y2 + 0.148904552394*X2*Y1^2 + 0.142408744984*X2*Y2^2 - 0.0486532039697*X1*X2*Y1 + 0.121033913629*X1*X2*Y2 - 0.00649580741066*X1*Y1*Y2 + 0.092196944986*X2*Y1*Y2 - 0.0483106652705*X1*Y1 - 0.0483106652705*X2*Y2 - 0.00316794272326*X1*Y2 + 0.00316794272326*X2*Y1 + 0.00634952598374*X1^2 + 0.00634952598374*X2^2 + 0.0922886309144*Y1^2 + 0.0922886309144*Y2^2 =0Ranges: for all unknowns [-10,10]
Solving method: GradientSolve+HullConsistency+
+3B
Solutions:: 3 (2 exact, 1 singular)
Computation time (September 2004):
| DELL D400 (1.7Ghz) | 364s |
Origin: COCONUT
Physical meaning: generalized eigenvalue problem
6 equations:
-10*x1*x6^2+ 2*x2*x6^2-x3*x6^2+x4*x6^2+ 3*x5*x6^2+x1*x6+ 2*x2*x6+x3*x6+ 2*x4* x6+x5*x6+ 10*x1+ 2*x2-x3+ 2*x4-2*x5 =0 2*x1*x6^2-11*x2*x6^2+ 2*x3*x6^2-2*x4*x6^2+x5*x6^2+ 2*x1*x6+x2*x6+ 2*x3*x6+x4* x6+ 3*x5*x6+ 2*x1+ 9*x2+ 3*x3-x4-2*x5 =0 -x1*x6^2+ 2*x2*x6^2-12*x3*x6^2-x4*x6^2+x5*x6^2+x1*x6+ 2*x2*x6-2*x4*x6-2*x5*x6- x1+ 3*x2+ 10*x3+ 2*x4-x5 =0 x1*x6^2-2*x2*x6^2-x3*x6^2-10*x4*x6^2+ 2*x5*x6^2+ 2*x1*x6+x2*x6-2*x3*x6+ 2*x4* x6+ 3*x5*x6+ 2*x1-x2+ 2*x3+ 12*x4+x5 =0 3*x1*x6^2+x2*x6^2+x3*x6^2+ 2*x4*x6^2-11*x5*x6^2+x1*x6+ 3*x2*x6-2*x3*x6+ 3*x4* x6+ 3*x5*x6-2*x1-2*x2-x3+x4+ 10*x5 =0 x1+x2+x3+x4+x5-1 :Ranges: [-1e8,1e8] for all unknowns
| DELL D400 (1.7Ghz) | 108s |
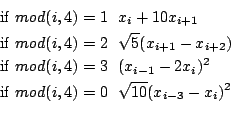
Origin: [7]
n equations:
![\begin{eqnarray*}
&&(x_i-0.01)^2+x_{i+1} i\in [1,n-1]\\
&&(x_n-0.1)+x_1-0.1
\end{eqnarray*}](img21.png)
Ranges: [-1e8,1e8]
Solving method: HessianSolve+HullConsistency+
3B
Solutions:: 2 (exact)
Computation time
| DELL 620 (May 2007) (1.7GHz) | 0.012s (n=9), 1.49s (n=20), 9.96s (n=30) |
Origin: [9]
Physical meaning: none
2 equations
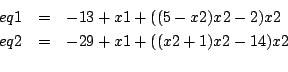
-13+x1+((5-x2)*x2-2)*x2 -29+x1+((x2+1)*x2-14)*x2Ranges: [-1e8,1e8] for x1, x2
| EVO 410C (1.2Ghz) | 0.04s |
Origin: [9]
2 equations
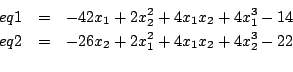
Ranges: [-1e8,1e8] for x1, x2
Solving method: HessianSolve+HullConsistency+3B
Solutions:: 9 (exact)
Computation time (April 2003):
| EVO 410C (1.2Ghz) | 0.11s |
Origin: COCONUT [13]
10 equations with 10 unknowns:
x1 - 0.18324757*(x4*x3*x9)^3 + x3^4*x9^7 - 0.25428722=0 x2 - 0.16275449*(x1*x10*x6)^3 + x10^4*x6^7 - 0.37842197=0 x3 - 0.16955071*(x1*x2*x10)^3 + x2^4*x10^7 - 0.27162577=0 x4 - 0.15585316*(x7*x1*x6)^3 + x1^4*x6^7 - 0.19807914=0 x5 - 0.19950920*(x7*x6*x3)^3 + x6^4*x3^7 - 0.44166728=0 x6 - 0.18922793*(x8*x5*x10)^3 + x5^4*x10^7 - 0.14654113=0 x7 - 0.21180486*(x2*x5*x8)^3 + x5^4*x8^7 - 0.42937161=0 x8 - 0.17081208*(x1*x7*x6)^3 + x7^4*x6^7 - 0.07056438=0 x9 - 0.19612740*(x10*x6*x8)^3 + x6^4*x8^7 - 0.34504906=0 x10 - 0.21466544*(x4*x8*x1)^3 + x8^4*x1^7 - 0.42651102=0Ranges: [-1,1] or [-100,100] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 1 for range [-1,1], 30 for range [-100,100] (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.02s (range [-1,1]), 397s (range [-100,100]) |
Origin: COCONUT
9 equations defined by:
y*u1 + u3 - a=0 x*u1 + u3 - b=0 w*u2 + u4 - c=0 z*u2 + u4 - d=0 2*u4*u1 + 2*u3*u2 - 9*t=0 u1 - (z+w)=0 u2 - (x+y)=0 u3 - w*z=0 u4 - x*y=0This is a modified version of the original system
y*z + z*w + w*y - a=0 z*x + x*w + w*z - b=0 w*x + x*y + y*w - c=0 x*y + y*z + z*x - d=0 2*x*y*z + 2*y*z*w + 2*z*w*x + 2*w*x*y - 9*t=0
Ranges: [-1e8,1e8] for u1,u2,u3,u4, [0,1000] for x,y,z,w,t
Solving method: GradientSolve+HullConsistencyStrong+3B
Solutions:: 1 (exact)
Computation time (May 2004)
| DELL D400 (1.7 GHz) | 0.02s (original) 0.03s (modified) |
Origin: Faugère, http://www-calfor.lip6.fr
Physical meaning: the unknowns is the value of a distribution
function of a field created by a mixture of a ferro antiferro magnetic
bond at some some points. Hence the unknowns are probabilities and
should lie in [0,1]
To respect the classical denomination in the bench of algebraic systems Katsura n has n+1 equations.

Unknowns: u(0),u(1),...u(n)
Ranges: [0,1]
Solving method: HessianSolve+HullConsistency+
SimplexConsistency+3B
Solutions:: 4 (n=9), 7 (n=12), 3 (n=13), 5 (n=14), 5 (n=15), 7
(n=20) (exact)
Computation time (April 2003):
| EVO 410C (1.2GHz) | 21.61s (n=9), 514.86s (n=12), 1077s (n=13), 2948s (n=14) |
| Cluster (12 PC's) | 37mn (n=15), 6h55mn (n=20) |
Origin: COCONUT
8 equations with 8 unknowns:
x1^2 + x2^2 -1=0 x3^2 + x4^2 -1=0 x5^2 + x6^2 -1=0 x7^2 + x8^2 -1=0 0.004731*x1*x3-0.3578*x2*x3-0.1238*x1-0.001637*x2-0.9338*x4+x7 - 0.3571=0 0.2238*x1*x3+0.7623*x2*x3+0.2638*x1-0.07745*x2-0.6734*x4-0.6022 =0 x6*x8+0.3578*x1+0.004731*x2 =0 0.2238*x2-0.7623*x1+0.3461 =0Ranges: [-1,1] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 16 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.23s |
Origin: COCONUT
4 equations with 4 unknowns with a =1, b=4, l1=10, l2=6
-a + l2*(c1*c2 - s1*s2) + l1*c1=0 -b + l2*(c1*s2 + c2*s1) + l1*s1=0 c1^2 + s1^2 - 1=0 c2^2 + s2^2 - 1=0Ranges: [-1,1] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 2 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.01s |
Origin: COCONUT
10 equations with 10 unknowns (or 80 equations with 80 unknowns)
X1+.3756574005e-2*(X1+1.090909091)^3+.3380916604e-2*(X2+1.181818182)^3 +.3005259204e-2*(X3+1.272727273)^3+.2629601803e-2*(X4+1.363636364)^3 +.2253944403e-2*(X5+1.454545455)^3+.1878287002e-2*(X6+1.545454545)^3 +.1502629602e-2*(X7+1.636363636)^3+.1126972201e-2*(X8+1.727272727)^3 +.7513148009e-3*(X9+1.818181818)^3+.3756574005e-3*(X10+1.909090909)^3=0 X2+.3380916604e-2*(X1+1.090909091)^3+.6761833208e-2*(X2+1.181818182)^3 +.6010518407e-2*(X3+1.272727273)^3+.5259203606e-2*(X4+1.363636364)^3 +.4507888805e-2*(X5+1.454545455)^3+.3756574005e-2*(X6+1.545454545)^3 +.3005259204e-2*(X7+1.636363636)^3+.2253944403e-2*(X8+1.727272727)^3 +.1502629602e-2*(X9+1.818181818)^3+.7513148009e-3*(X10+1.909090909)^3=0 X3+.3005259204e-2*(X1+1.090909091)^3+.6010518407e-2*(X2+1.181818182)^3 +.9015777611e-2*(X3+1.272727273)^3+.7888805409e-2*(X4+1.363636364)^3 +.6761833208e-2*(X5+1.454545455)^3+.5634861007e-2*(X6+1.545454545)^3 +.4507888805e-2*(X7+1.636363636)^3+.3380916604e-2*(X8+1.727272727)^3 +.2253944403e-2*(X9+1.818181818)^3+.1126972201e-2*(X10+1.909090909)^3=0 X4+.2629601803e-2*(X1+1.090909091)^3+.5259203606e-2*(X2+1.181818182)^3 +.7888805409e-2*(X3+1.272727273)^3+.1051840721e-1*(X4+1.363636364)^3 +.9015777611e-2*(X5+1.454545455)^3+.7513148009e-2*(X6+1.545454545)^3 +.6010518407e-2*(X7+1.636363636)^3+.4507888805e-2*(X8+1.727272727)^3 +.3005259204e-2*(X9+1.818181818)^3+.1502629602e-2*(X10+1.909090909)^3=0 X5+.2253944403e-2*(X1+1.090909091)^3+.4507888805e-2*(X2+1.181818182)^3 +.6761833208e-2*(X3+1.272727273)^3+.9015777611e-2*(X4+1.363636364)^3 +.1126972201e-1*(X5+1.454545455)^3+.9391435011e-2*(X6+1.545454545)^3 +.7513148009e-2*(X7+1.636363636)^3+.5634861007e-2*(X8+1.727272727)^3 +.3756574005e-2*(X9+1.818181818)^3+.1878287002e-2*(X10+1.909090909)^3=0 X6+.1878287002e-2*(X1+1.090909091)^3+.3756574005e-2*(X2+1.181818182)^3 +.5634861007e-2*(X3+1.272727273)^3+.7513148009e-2*(X4+1.363636364)^3 +.9391435011e-2*(X5+1.454545455)^3+.1126972201e-1*(X6+1.545454545)^3 +.9015777611e-2*(X7+1.636363636)^3+.6761833208e-2*(X8+1.727272727)^3 +.4507888805e-2*(X9+1.818181818)^3+.2253944403e-2*(X10+1.909090909)^3=0 X7+.1502629602e-2*(X1+1.090909091)^3+.3005259204e-2*(X2+1.181818182)^3 +.4507888805e-2*(X3+1.272727273)^3+.6010518407e-2*(X4+1.363636364)^3 +.7513148009e-2*(X5+1.454545455)^3+.9015777611e-2*(X6+1.545454545)^3 +.1051840721e-1*(X7+1.636363636)^3+.7888805409e-2*(X8+1.727272727)^3 +.5259203606e-2*(X9+1.818181818)^3+.2629601803e-2*(X10+1.909090909)^3=0 X8+.1126972201e-2*(X1+1.090909091)^3+.2253944403e-2*(X2+1.181818182)^3 +.3380916604e-2*(X3+1.272727273)^3+.4507888805e-2*(X4+1.363636364)^3 +.5634861007e-2*(X5+1.454545455)^3+.6761833208e-2*(X6+1.545454545)^3 +.7888805409e-2*(X7+1.636363636)^3+.9015777611e-2*(X8+1.727272727)^3 +.6010518407e-2*(X9+1.818181818)^3+.3005259204e-2*(X10+1.909090909)^3=0 X9+.7513148009e-3*(X1+1.090909091)^3+.1502629602e-2*(X2+1.181818182)^3 +.2253944403e-2*(X3+1.272727273)^3+.3005259204e-2*(X4+1.363636364)^3 +.3756574005e-2*(X5+1.454545455)^3+.4507888805e-2*(X6+1.545454545)^3 +.5259203606e-2*(X7+1.636363636)^3+.6010518407e-2*(X8+1.727272727)^3 +.6761833208e-2*(X9+1.818181818)^3+.3380916604e-2*(X10+1.909090909)^3=0 X10+.3756574005e-3*(X1+1.090909091)^3+.7513148009e-3*(X2+1.181818182)^3 +.1126972201e-2*(X3+1.272727273)^3+.1502629602e-2*(X4+1.363636364)^3 +.1878287002e-2*(X5+1.454545455)^3+.2253944403e-2*(X6+1.545454545)^3 +.2629601803e-2*(X7+1.636363636)^3+.3005259204e-2*(X8+1.727272727)^3 +.3380916604e-2*(X9+1.818181818)^3+.3756574005e-2*(X10+1.909090909)^3=0Ranges: [-1e8,0] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 1 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.02s (10 equations), 437s (80 equations) |
Origin: COCONUT
8 equations with 8 unknowns
e*g + 2*d*h =0 9*e + 4*b =0 4*c*h + 2*e*f + 3*d*g =0 7*c - 9*a + 8*f =0 4*d*f + 5*c*g + 6*h + 3*e =0 5*d + 6*c*f + 7*g - 9*b =0 9*d + 6*a - 5*b=0 -9*c + 7*a - 8=0Ranges: [-1e8,1e8] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 4 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.62s |
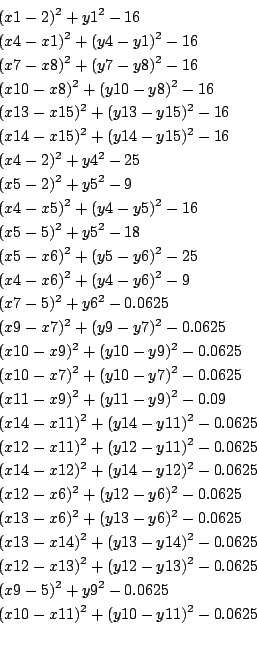
Origin: COPRIN
Physical meaning: we consider a set of points in a plane. Among
these points the distance between some pairs is known
26 equations
(x1-2)^{2}+{y1}^{2}-16=0
(x4-x1)^{2}+(y4-y1)^{2}-16=0
(x7-x8)^{2}+(y7-y8)^{2}-16=0
(x10-x8)^{2}+(y10-y8)^{2}-16=0
(x13-x15)^{2}+(y13-y15)^{2}-16=0
(x14-x15)^{2}+(y14-y15)^{2}-16=0
(x4-2)^{2}+{y4}^{2}-25=0
(x5-2)^{2}+{y5}^{2}-9=0
(x4-x5)^{2}+(y4-y5)^{2}-16=0
(x5-5)^{2}+{y5}^{2}-18=0
(x5-x6)^{2}+(y5-y6)^{2}-25=0
(x4-x6)^{2}+(y4-y6)^{2}-9=0
(x7-5)^{2}+{y6}^{2}- 0.0625=0
(x9-x7)^{2}+(y9-y7)^{2}- 0.0625=0
(x10-x9)^{2}+(y10-y9)^{2}- 0.0625=0
(x10-x7)^{2}+(y10-y7)^{2}- 0.0625=0
(x11-x9)^{2}+(y11-y9)^{2}- 0.09=0
(x14-x11)^{2}+(y14-y11)^{2}- 0.0625=0
(x12-x11)^{2}+(y12-y11)^{2}- 0.0625=0
(x14-x12)^{2}+(y14-y12)^{2}- 0.0625=0
(x12-x6)^{2}+(y12-y6)^{2}- 0.0625=0
(x13-x6)^{2}+(y13-y6)^{2}- 0.0625=0
(x13-x14)^{2}+(y13-y14)^{2}- 0.0625=0
(x12-x13)^{2}+(y12-y13)^{2}- 0.0625=0
(x9-5)^{2}+{y9}^{2}- 0.0625=0
(x10-x11)^{2}+(y10-y11)^{2}- 0.0625=0
Unknowns:
Range: may be chosen arbitrary large without any change in the
computation time
Solving method: SolveDistance
Solutions:: 128 (exact)
Computation time (April 2003):
| EVO 410C (1.2Ghz) | 437.8s |
Origin: COCONUT
9 equations with 9 unknowns
x - l*t^3 - L*w =0 y - L*t - l*w^3 =0 L - 1 =0 l - 2 =0 x - a =0 2*a - 3 =0 y - b =0 b - r*t =0 w^2 - 1 + t^2 =0Ranges: [-100000,100000] for all unknowns except w [0,100000]
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 1 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.01s |
Let ![]() be defined as:
be defined as:



Unknowns:k1,k2,k3
Ranges: [0.06,1] for all unknowns
Solving method: HessianSolve
Solutions:: 2 (exact)
Computation time (April 2003):
| Sun Blade | 31.31s |
| EVO 410C (1.2Ghz) | 12.58s |
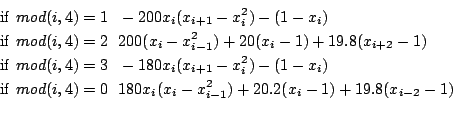
Origin: Norton, R D, and Scandizzo, P L, Market Equilibrium
Computations in Activity Analysis Models. Operations Research 29, 2
(1981)
23 equations in 21 unknowns, x1,..x21
Ranges for the unknowns: [-1e8,1e8] for x1, [0.2,1e8] for x2,x3,x4,
[0,1e8] for the other variables
x5 + x6 - 0.94*x11 - 0.94*x12 - 0.94*x13 + 0.244*x17 + 0.244*x18+ 0.244*x19 =0
0.064*x11 + 0.064*x12 + 0.064*x13 - 0.58*x14 - 0.58*x15 - 0.58*x16
+ 0.172*x17 + 0.172*x18 + 0.172*x19 =0
x7 + x8 + 0.048*x11 + 0.048*x12 + 0.048*x13 + 0.247*x14 + 0.247*x15
+ 0.247*x16 - 0.916*x17 - 0.916*x18 - 0.916*x19 =0
x11 + 1.2*x12 + 0.8*x13 + 2*x14 + 1.8*x15 + 2.4*x16 + 3*x17 + 2.7*x18
+ 3.2*x19 - 3712=0
2*x11 + 1.8*x12 + 2.2*x13 + 3*x14 + 3.5*x15 + 2.3*x16 + 3*x17 + 3.2*x18
+ 2.7*x19 - 5000=0
356.474947137148*x2 + 53.7083537310174*x4 + x5 - 0.564264890180399*x20- 352=0
339.983422262764*x2 + 43.5418249774113*x4 + x6 - 0.405939876920766*x21- 430=0
106.946746119538*x2 + 145.018955433089*x4 + x7 - 0.507117039797071*x20 - 222=0
173.929713444361*x2 + 203.031384299627*x4 + x8 - 0.578889145413521*x21 - 292=0
x5*x2 + x7*x4 - x20 =0
x6*x2 + x8*x4 - x21 =0
- 3340.8*x9 - 500*x10 + x20 =0
- 371.2*x9 - 4500*x10 + x21 =0
0.94*x2 - 0.064*x3 - 0.048*x4 - x9 - 2*x10 =0
0.94*x2 - 0.064*x3 - 0.048*x4 - 1.2*x9 - 1.8*x10 =0
0.94*x2 - 0.064*x3 - 0.048*x4 - 0.8*x9 - 2.2*x10 =0
0.58*x3 - 0.247*x4 - 2*x9 - 3*x10 =0
0.58*x3 - 0.247*x4 - 1.8*x9 - 3.5*x10 =0
0.58*x3 - 0.247*x4 - 2.4*x9 - 2.3*x10 =0
- 0.244*x2 - 0.172*x3 + 0.916*x4 - 3*x9 - 3*x10 =0
- 0.244*x2 - 0.172*x3 + 0.916*x4 - 2.7*x9 - 3.2*x10 =0
- 0.244*x2 - 0.172*x3 + 0.916*x4 - 3.2*x9 - 2.7*x10 =0
- (x5*x2 + x6*x2 + x7*x4 + x8*x4) - x1 + 3712*x9 + 5000*x10 =0
Solving method: GradientSolve+HullConsistency+
+3B
| DELL D400 (1.7GHz) | 16.73s |
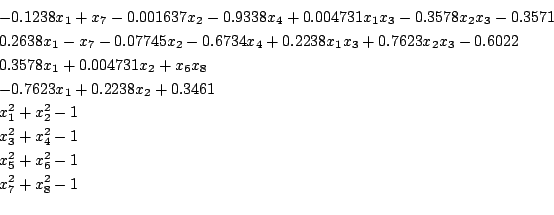
Origin: COCONUT
Physical meaning: inverse kinematics of a 3R robot
8 equations with 8 unknowns
x1^2 + x2^2 - 1 =0 x3^2 + x4^2 - 1 =0 x5^2 + x6^2 - 1 =0 x7^2 + x8^2 - 1 =0 0.004731*x1*x3 - 0.3578*x2*x3 - 0.1238*x1 - 0.001637*x2 - 0.9338*x4 + x7=0 1 =0 0.2238*x1*x3 + 0.7623*x2*x3 + 0.2638*x1 - 0.07745*x2 -0.6734*x4 -0.6022 =0 x6*x8 + 0.3578*x1 + 0.004731*x2 =0 -0.7623*x1 + 0.2238*x2 + 0.3461 =0Ranges: [-1,1] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 16 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 0.23s |
Origin: COCONUT
8 equations with 8 unknowns
x1 + x1*x2 + x2*x3 + x3*x4 + x4*x5 + x5*x6 + x6*x7 - 1*u8 =0
x2 + x1*x3 + x2*x4 + x3*x5 + x4*x6 + x5*x7 - 2*u8 =0
x3 + x1*x4 + x2*x5 + x3*x6 + x4*x7 - 3*u8 =0
x4 + x1*x5 + x2*x6 + x3*x7 - 4*u8 =0
x5 + x1*x6 + x2*x7 - 5*u8 =0
x6 + x1*x7 - 6*u8 =0
x7 - 7*u8 =0
x1 + x2 + x3 + x4 + x5 + x6 + x7 + 1 =0
Ranges: [-1e8,1e8] for all unknowns
Solving method: GradientSolve+HullConsistencyStrong+
+3B
Solutions:: 8 (exact)
Computation time (May 2004):
| DELL D400 (1.7GHz) | 39.46s |
- 0.1238 x_1+x_7- 0.001637 x_2- 0.9338 x_4+ 0.004731 x_1 x_3- 0.3578 x_2 x_3- 0.3571 0.2638 x_1-x_7- 0.07745 x_2- 0.6734 x_4+ 0.2238 x_1 x_3+ 0.7623 x_2 x_3- 0.6022 0.3578 x_1+ 0.004731 x_2+x_6 x_8- 0.7623 x_1+ 0.2238 x_2+ 0.3461 x_1^2+x_2^2-1 x_3^2+x_4^2-1 x_5^2+x_6^2-1 x_7^2+x_8^2-1Ranges: for all unknowns [-1,1]
Solving method: HessianSolve+HullConsistency+
SimplexConsistency+3B
Solutions:: 16 (exact)
Computation time (April 2003):
| Evo 410C (1.2Ghz) | 0.38s |
Origin: COCONUT, Shoven :"Applied general equilibrium modelling",
IMF Staff Papers, pages 394-419, 1983
Physical meaning: a general economic equilibrium model
3 equations defined by:
y^4-20/7*x^2 =0 x^2*z^4+7/10*x*z^4+7/48*z^4-50/27*x^2-35/27*x-49/216 =0 3/5*x^6*y^2*z+x^5*y^3+3/7*x^5*y^2*z+7/5*x^4*y^3-7/20*x^4*y*z^2- 3/20*x^4*z^3+609/1000*x^3*y^3+63/200*x^3*y^2*z-77/125*x^3*y*z^2- 21/50*x^3*z^3+49/1250*x^2*y^3+147/2000*x^2*y^2*z- 23863/60000*x^2*y*z^2-91/400*x^2*z^3-27391/800000*x*y^3+ 4137/800000*x*y^2*z-1078/9375*x*y*z^2-5887/200000*x*z^3-1029/160000*y^3- 24353/1920000*y*z^2-343/128000*z^3 =0Ranges: for all unknowns [-1e8,1e8]
Solving method: GradientSolve+HullConsistencyStrong+3B
Solutions:: 16 (exact) +2 singular
Computation time (May 2004)
| DELL D400 (1.7 GHz) | 2.87s |
Origin: FRISCO
Physical meaning: Polynomial systems arising in the study of
central configurations in the N-body problem of Celestial Mechanics
6 equations
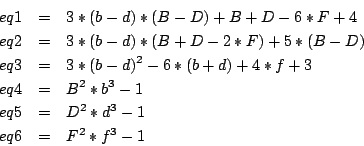
3*(b-d)*(B-D)+B+D-6*F+4=0 3*(b-d)*(B+D-2*F)+5*(B-D)=0 3*(b-d)^2-6*(b+d)+4*f+3=0 B^2*b^3-1=0 D^2*d^3-1=0 F^2*f^3-1=0Ranges: for all unknowns [0,1e5]
| Sun Blade | 28.69s (April 2003) |
| EVO 410C (1.2Ghz) | 4.68s (April 2003) |
| DELL D400 (1.7Ghz) | 0.95s (May 2004) |
Origin: [7]
2 equations:
Ranges: [-1e8,1e8]
Solving method: HessianSolve+HullConsistency+
3B
Solutions:: 2 (exact)
Computation time
| DELL 620 (May 2007) (1.7GHz) | 0.01s |
![\begin{displaymath}
2.5x_i^3-10.5x_i^2+11.8x_i-i+\sum_{i =1}^{i =n}x_i =0 i \in [1,n]
\end{displaymath}](img35.png)
Ranges: for all unknowns [-1e8,1e8]
Solving method: SolveSimplexGradient+HullConsistency+3B
Solutions:: 9 for n=16, 7 for n=32 (exact)
Computation time (April 2003):
| Sun Blade | 2.11s |
| EVO 410C (1.2Ghz) | 39.25s (n=16), 975s (n=32) |
Jean-Pierre Merlet