Dans beaucoup d'applications de la robotique on utilise le robot pour amener un objet d'une position à une autre. C'est typiquement le cas dans les opérations d'emballages où les produits sont initialement dans des contenants et doivent être chacun déposés dans une position fixée dans une boîte.
Dans les structures décrites on peut remarquer que on a toujours une succession segment-articulation tout le long du robot: c'est ce que l'on appelle une structure série. Une grande partie des manipulateurs industriels utilise ce type de structure mécanique (figure 2).
La structure mécanique décrite ci-dessus permet des mouvements mais nous n'avons pas encore parlé des organes qui vont créer le mouvement. Dans le cas du bras humain ce sont les muscles qui vont permettre le mouvement en modifiant la position de l'humérus, de l'avant-bras et de la main Pour un vélo à assistance électrique c'est un moteur électrique rotatif qui fait tourner la roue du vélo. Il en sera de même pour un robot dont les articulations permettant une rotation seront rendues actives par ce type de moteur. Le robot est donc maintenant actionné. Un opérateur peut alors commander le robot. Par exemple pour une grue le grutier fait tourner la grue grâce au moteur électrique placé à sa base, fait glisser le chariot puis déroule le câble qui fait monter ou descendre la charge. Quand c'est un humain qui donne les ordres de mouvement aux moteurs on parle de mode téléopéré. Mais ce mode ne convient pas pour les robots qui doivent accomplir des tâches automatiquement comme, par exemple saisir, un objet en une position connue puis lui faire suivre une trajectoire pour enfin le déposer précisément en un autre endroit.
Imaginons par exemple une grue automatique qui devrait déposer des parpaings d'un camion vers un lieux de stockage. La grue devra alors s'orienter d'abord dans la direction du camion (supposé connue), soulever la charge puis tourner en direction du lieu de stockage (lui aussi connu). Pour aligner la grue avec le camion le grutier envoit le courant dans le moteur et le stoppe quand il voit visuellement que la grue a tourné de la quantité voulue. Il utilise donc de la perception, sa vue, pour arrêter le mouvement. Dans un système automatique on va procéder autrement: un système de vision va déterminer de combien et dans quel sens doit tourner la grue pour être dans l'axe du camion et on place sur l'axe du moteur un dispositif, dit capteur, qui mesure de combien le moteur tourne. Pour faire simple l'ordinateur qui va contrôler la grue reçoit l'information du capteur, envoit le courant dans le moteur et le stoppe lorsque la grue a tourné de la quantité voulue.
Ce principe de fonctionnement est employé dans tous les robots même les plus sophistiqués comme les robots humanoïde, les drones, les robots d'exploration spatiales ou sous-marine. La différence entre ces robots et le simple robot de manipulation est qu'il va y avoir plusieurs de ces systèmes et que leur mouvement doit être cohérent pour réaliser un objectif: par exemple dans un robot humanoïde il faut contrôler simultanément les mouvements des jambes, des bras et du tronc pour que le robot marche en équilibre.
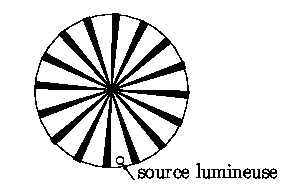
D'un côté
du disque on place une source lumineuse et de l'autre côté un
récepteur de lumière. Ce récepteur fournit une tension, disons
5V, lorsqu'il est éclairé et ne fournit pas de tension (il est à
0V) lorsqu'il ne reçoit pas de lumière.
Supposons le moteur arrêté avec le disque dans une position où
la source de lumière est en face d'un secteur opaque: le récepteur
est alors à 0V. Lorsque le moteur, et
donc le disque, tourne l'émetteur de lumière va se trouver en face
d'un secteur transparent et le récepteur passe à 5V. Si la
rotation continue le disque va à nouveau devant un secteur opaque et
le récepteur passe à 0V et ainsi de suite. Le récepteur fournit
donc un signal qui est une succession de 0V, 5V, 0V, 5V et ainsi de
suite. Un système électronique va alors détecter quand le signal
passe de 0V à 5V. Supposons qu'il y ait 360 secteurs opaques et
transparents sur le disque, donc 720 secteurs au totale. Pour que la
source lumière passe d'un
secteur opaque à un transparent le moteur doit
donc avoir avoir tourné de
1/2 degrés. Chaque passage de 0 à 5V du récepteur indique donc
une rotation de 1/2 degrés. Si l'on compte un nombre ![]() de ces
passages on sait alors que le moteur à tourné de
de ces
passages on sait alors que le moteur à tourné de ![]() degrés.
Plus exactement on peut dire que le moteur a tourné d'au moins
degrés.
Plus exactement on peut dire que le moteur a tourné d'au moins
![]() degrés mais de moins que
degrés mais de moins que ![]() degrés: la mesure n'est donc
pas exacte mais l'erreur de mesure sera relativement faible.
degrés: la mesure n'est donc
pas exacte mais l'erreur de mesure sera relativement faible.
La vidéo ci-dessous montre le fonctionnement du codeur. Le cercle en vert dans le disque représente l'émetteur et le cercle en dehors du cercle le signal du récepteur qui passe en vert lorsqu'il reçoit de la lumière ou est en rouge s'il n'en reçoit pas.
Ce type de capteur a toutefois un défaut. Il ne mesure que la rotation
relative à la position de départ et donc on ignore l'angle
de rotation de la grue à ce moment. Il existe des codeurs qui n'ont
pas ce défaut mais ils sont coûteux.
Lorsque
l'on applique une tension au moteur qui dépend de la rotation
souhaitée et de celle mesurée on parle
alors de loi de commande. Le but de la discipline scientifique
automatique est justement d'élaborer des lois de commande qui
permettent d'atteindre au mieux l'objectif souhaité
De nombreux robots de type bras humains sont à l'oeuvre dans l'industrie pour déplacer une charge. Il ont toutefois des limitations: