Dans cette section nous allons voir comment on peut élaborer des CDPR simples avec du matériel peu coûteux. Le montage mécanique, très simple, peut être réalisé dès le niveau collège. Le montage mécanique suffit pour illustrer les mouvements du CDPR en mode téléopéré: on branche manuellement les moteurs à leur alimentation dans un sens ou l'autre pour enrouler ou dérouler les câbles.
Par contre si l'on désire effectuer des mouvements plus élaborés et coordonnées il y aura besoin d'une partie électronique et de programmation. Cette intégration est légèrement plus complexe que la partie mécanique mais reste très accessible.
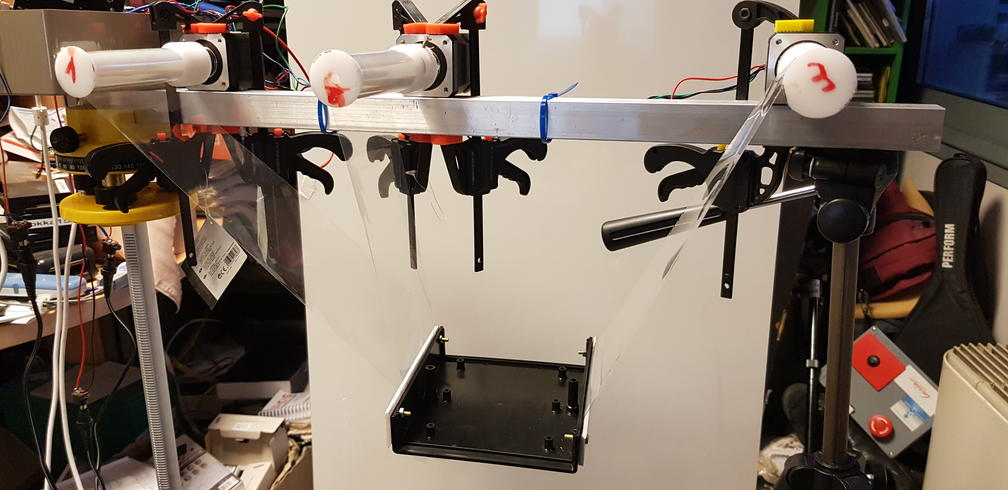
Nous abordons ici la réalisation pratique d'un CDPR susceptible d'être réalisé par les élèves d'un classe de collège ou par un bricoleur. Ce CDPR a juste deux treuils et son objectif est de pouvoir déplacer un objet dans un plan (montée/descente, avant/arrière).
Il vous faudra:
Pour la commande on trouve des cartes permettant de commander 2 moteurs avec codeur pour 10 à 30 euros dans le monde Arduino. Si vous voulez du matériel plus robuste et plus performants vous pouvez prendre des cartes Phidgets qui communiquent avec un ordinateur portable via un port USB
https://www.gotronic.fr/
https://www.generationrobots.com/fr/
Pour choisir les moteurs il faut décider de la masse ![]() que vous
allez transporter et du rayon du tambour
que vous
allez transporter et du rayon du tambour ![]() . La puissance d'un
moteur est décrite par un nombre, appelé son couple,
qui est toujours indiqué dans les notices.
Toutefois le couple est indiqué dans les notices avec différentes
unités comme Newton.mètre (Nm) ou en Newton.centimètre (Ncm)
avec 100Ncm=1Nm.
Mais il est souvent donné en kilo.centimètre (kg.cm) ou
en gramme.centimètre (g.cm)
(1 kgcm = 10N.cm, 1 gcm=0.01 N.cm).
Je vous conseille de choisir un moteur dont le couple
en N.cm est donné par
. La puissance d'un
moteur est décrite par un nombre, appelé son couple,
qui est toujours indiqué dans les notices.
Toutefois le couple est indiqué dans les notices avec différentes
unités comme Newton.mètre (Nm) ou en Newton.centimètre (Ncm)
avec 100Ncm=1Nm.
Mais il est souvent donné en kilo.centimètre (kg.cm) ou
en gramme.centimètre (g.cm)
(1 kgcm = 10N.cm, 1 gcm=0.01 N.cm).
Je vous conseille de choisir un moteur dont le couple
en N.cm est donné par
A partir ce cette base vous pourrez construire votre robot mais vous pourrez aussi l'étendre pour en faire un robot à 3 ou 4 câbles. Toutefois un CDPR à deux câbles avec la combinaison moteur pas-à-pas et tambour simple est le plus simple à réaliser et est immédiatement fonctionnel.
Vous pouvez aussi opter pour un treuil avec un guide à spirale comme montré en figure 9, plus complexe à construire, mais qui sera plus performant.
Du point de vue mécanique il suffit de coller le tambour sur l'axe du moteur. Il vous faudra peut être prévoir une pièce d'adaptation si le diamètre du trou du tambour est plus grand que le diamètre de l'arbre du moteur, ce qui peut se faire avec une simple cheville. Il faut que l'axe du moteur et du tambour soient bien concentriques. Une fois cela fait si vous voulez utiliser le CDPR en mode téléopéré il suffit de placer les treuils en position. Le reste de la section n'est utile que si l'on veut obtenir un déplacement contrôlé de la charge.
L'étape initiale va être de simplement repérer comment varie la
longueur du câble lorsque l'on demande au moteur pas à pas de
tourner d'un nombre positif de pas ou, pour un moto-réducteur quand
on met une tension positive. Pour cela on va utiliser un nombre ![]() qui sera 1 si le câble se déroule et -1 s'il s'enroule.
qui sera 1 si le câble se déroule et -1 s'il s'enroule.
Il faut ensuite établir la relation entre rotation du tambour et
variation de longueur du câble. Une méthode simple, mais
approximative, va être de dérouler
le câble et de mesurer la longueur actuelle du câble ![]() ,
c'est-à-dire
la distance entre la sortie du
tambour et l'extrémité du câble.
On enroule ensuite quelques spires de câble sur le tambour, en les
comptant et on recommence la mesure de la longueur du câble pour
obtenir
,
c'est-à-dire
la distance entre la sortie du
tambour et l'extrémité du câble.
On enroule ensuite quelques spires de câble sur le tambour, en les
comptant et on recommence la mesure de la longueur du câble pour
obtenir ![]() . Si
. Si ![]() est le nombre de spires enroulées
Le rapport
est le nombre de spires enroulées
Le rapport ![]() vous donnera alors de quelle
longueur
s'enroule le câble pour un tour du tambour soit
vous donnera alors de quelle
longueur
s'enroule le câble pour un tour du tambour soit
![]() . Réciproquement vous pourrez calculer l'angle de rotation
. Réciproquement vous pourrez calculer l'angle de rotation
![]() du
moteur en degrés pour enrouler/dérouler une longueur de câble
donnée
du
moteur en degrés pour enrouler/dérouler une longueur de câble
donnée ![]() par la formule
par la formule
![]() .
Vous pouvez aussi évaluer directement
.
Vous pouvez aussi évaluer directement ![]() en
mesurant le rayon
en
mesurant le rayon ![]() du tambour avec la formule
du tambour avec la formule
![]() .
.
L'étape suivante va consistez dans le placement définitif des
treuils puis à mesurer la position des points ![]() du CDPR. Pour
cela
placez vos platines de treuil dans leur position définitive puis mesurez
les hauteurs
du CDPR. Pour
cela
placez vos platines de treuil dans leur position définitive puis mesurez
les hauteurs ![]() du centre des tambours ainsi que la distance
du centre des tambours ainsi que la distance
![]() selon l'horizontale entre les centres des tambours (figure 25).
selon l'horizontale entre les centres des tambours (figure 25).
L'étape suivante avant utilisation va consister à calibrer l'angle
0 pour les moteurs pas-à-pas ou pour le codeur du moto-réducteur.
Avant de mettre en route le système on va dérouler entièrement
les câbles puis les
enrouler les câbles soigneusement, à spires jointives, à la main
pour placer la charge à
peu près au milieu
entre les treuils et à une hauteur raisonnable du sol. Puis
vous devez mesurer
les longueurs
![]() des câbles dans cette position.
A partir de ces mesures vous allez pouvoir calculer le nombre de pas
des câbles dans cette position.
A partir de ces mesures vous allez pouvoir calculer le nombre de pas ![]() que doit tourner un moteur pas-à-pas avec un réducteur
de valeur
que doit tourner un moteur pas-à-pas avec un réducteur
de valeur ![]() , dont le nombre de pas par tour
est
, dont le nombre de pas par tour
est ![]() , pour le câble 1 atteigne une
longueur donnée
, pour le câble 1 atteigne une
longueur donnée ![]() par la formule
par la formule
Pour ce qui concerne Arduino ou Raspberry les fabricants de contrôleur de moteur pas-à-pas fournissent des librairies qui permettent de demander au moteur de tourner d'un certain nombre de pas. Le contrôleur attend en général un nombre de pas sur une entrée, la vitesse de rotation sur une autre et le sens de rotation du moteur sur une troisième entrée. Pour les moto-réducteurs cela est un peu plus compliqué car le contrôleur prend uniquement en entrée une vitesse de consigne et fournit le nombre de top codeur mesuré. Il vous reviendra alors d'arrêter le moteur (en fixant la vitesse du moteur à 0) lorsque ce nombre sera proche de la valeur désirée. De nombreux tutoriaux sur le web expliquent comment faire un programme qui prend en entrée une consigne sur l'angle de rotation et arrête le moteur lorsque la rotation est correcte.
Pour faire déplacer votre CDPR vers un position connue définie par
la donnée de ![]() et
et ![]() on calculera d'abord les longueurs des
câbles avec les formules (12,13) puis, pour le moteur
pas-à-pas, le nombre de pas à faire par la formule (14)
tandis que pour le moto-réducteur l'angle de rotation sera donné
par la formule (15). Il suffit ensuite de choisir une vitesse
de rotation des moteurs puis envoyer ces consignes vers les
contrôleurs pour que le CDPR parte de sa position courante vers la
position choisie et s'arrête à proximité.
on calculera d'abord les longueurs des
câbles avec les formules (12,13) puis, pour le moteur
pas-à-pas, le nombre de pas à faire par la formule (14)
tandis que pour le moto-réducteur l'angle de rotation sera donné
par la formule (15). Il suffit ensuite de choisir une vitesse
de rotation des moteurs puis envoyer ces consignes vers les
contrôleurs pour que le CDPR parte de sa position courante vers la
position choisie et s'arrête à proximité.
A noter que progressivement au fur et à mesure du temps
d'utilisation votre CDPR peut dériver, c'est-à-dire s'arrêter de
plus en plus loin de la position désirée. Cela est du au fait que
l'enroulement des câbles sur le tambour peut être assez erratique
avec comme effet que la vraie valeur de ![]() s'éloigne de la valeur
mesurée ou calculée.
Dans ce cas il
convient de procédez à un redémarrage du système.
s'éloigne de la valeur
mesurée ou calculée.
Dans ce cas il
convient de procédez à un redémarrage du système.
Une première solution pour obtenir une trajectoire plus proche de la ligne droite est de jouer sur les vitesses des moteurs. Si vous enrouler/dérouler le câble toujours à la même vitesse et si un des câble doit enrouler/dérouler une plus grande longueur, les câbles ne seront pas en même temps à la longueur désirée. On peut remédier à cela en ayant des vitesses de moteur différentes. Si par exemple le treuil 1 et 2 doivent enrouler respectivement 30 cm et 60 cm de câble on peut demander au moteur 2 de tourner deux fois plus vite que le moteur 1 afin que les moteurs s'arrêtent approximativement en même temps. La vidéo suivante montre la différence de résultat entre les deux stratégies, la première conduisant à la trajectoire bleue, la seconde à la trajectoire rouge.
Pour améliorer ce comportement une manière simple (mais pas la plus efficace) est de découper la ligne droite entre la position de départ et celle d'arrivée en tronçon, en définissant des positions intermédiaires sur la ligne droite. Au départ on ne vise plus les longueurs de câble de la position finale mais celle de la première position intermédiaire (mais en appliquant la deuxième`e stratégie). Lorsque le CDPR a comme longueurs de câble des valeurs proches de cet objectif on passe à la seconde position intermédiaire et ainsi de suite jusqu'à la position finale.
La trajectoire obtenue sera hachée, assez proche d'une droite
mais la vitesse du point ![]() ne sera pas constante.
Pour obtenir une meilleure ligne droite et une vitesse constante du
CDPR il faudrait effectuer une commande du CDPR non plus en terme de
longueur de câble mais en terme de vitesse
d'enroulement/déroulement des câbles. Cela n'est pas très
compliqué mais nécessite un algorithme plus élaboré.
ne sera pas constante.
Pour obtenir une meilleure ligne droite et une vitesse constante du
CDPR il faudrait effectuer une commande du CDPR non plus en terme de
longueur de câble mais en terme de vitesse
d'enroulement/déroulement des câbles. Cela n'est pas très
compliqué mais nécessite un algorithme plus élaboré.
Les CDPR présentés dans les sections précédentes vont avoir une vitesse de déplacement relativement lente. Il peut être toutefois instructif de construire un CDPR plus rapide. Il faut cependant être conscient que l'on va payer l'accroissement de la vitesse par une diminution de la masse que l'on va pouvoir déplacer. Inversement on peut aussi désirer soulever une masse importante quitte à ce que cela soit à une vitesse lente.
Pour cela la solution la plus simple est évidemment de prendre un moteur pas-à-pas qui tourne plus vite ou est plus puissant. Mais, outre leur coût bien plus élevé, il y a une limite à la vitesse de rotation ou au couple du moteur . Une autre solution est de passer à un moto-réducteur et de prendre une réduction faible ou plus haute. Cette réduction est nécessaire car un moteur électrique sans réduction tourne selon sa taille, à une vitesse entre 10 000 et 3000 tours par minute, soit entre 166 et 50 tours par seconde. A 166 tours par seconde un tambour de 1.5 cm de rayon va enrouler plus de 15 mètres de câble en une seconde ce qui veut dire qu'un CDPR avec de tel moteur pourrait aller d'un bout à l'autre d'une classe en moins de 2 secondes.
L'inconvénient de cette solution est qu'elle est peu modulaire: passer d'une version très rapide à une version plus lente mais permettant de déplacer une charge plus importante va nécessiter de modifier la mécanique pour ajouter un réducteur.
Une solution permettant une plus grande facilité de modularité va être d'utiliser le même principe que celui que nous avons décrit dans la section 4.1.3: utiliser un palan. La vidéo de cette section montre comment les déplacements d'un chariot sont multiplié pour créer des variations de longueur d'un câble. On trouve facilement sur le web des palans qui, au contraire, multiplie la force exercée par le moteur et transmise par le câble. L'intérêt du palan est que l'on peut très facilement en modifier son facteur de réduction/augmentation en passant ou pas dans les poulies disponibles. Un palan ne nécessite que l'utilisation de quelques poulies que l'on peut trouver pour le modélisme ou le nautique pour quelques euros et éventuellement de tiges métalliques qui serviront d'axe pour les poulies. Il est préférable d'utiliser des poulies avec une cage pour éviter que le câble ne sorte de la poulie et idéalement des poulies à billes qui permettent de diminuer l'usure du câble.
Le fait d'avoir une charge suspendue va induire des oscillations de la
charge. Nous avons expliqué dans la section 7 que nous
pouvons considérablement les réduire en passant à 8 câbles
tout en n'utilisant que 4 moteurs. En pratique un moteur va
entraîner simultanément deux treuils qui vont enrouler la
même quantité de câble (l'utilisation d'un tambour à spirale
est conseillée). Pour la construction la solution la plus simple
consiste à utiliser un moteur avec deux sorties, chacune des sorties
entraînant un tambour. Un système de poulie permet de ramener
les deux câbles très proches l'un de l'autre l'un partant
verticalement vers le haut du mât au point ![]() , l'autre partant
aussi verticalement vers le point
, l'autre partant
aussi verticalement vers le point ![]() .
.
Jusqu'à maintenant nous avons supposé que les treuils étaient fixes. Cela a l'inconvénient que leur installation nécessite du travail sur l'environnement, ne serait ce que pour fixer les treuils. Mais on peut renverser le CDPR en mettant les treuils avec leur système de commande sur la charge. Dans ce cas il suffit d'avoir de simple attaches à l'extrémité des câbles que l'on pourra fixer très rapidement à tout élément de l'environnement en hauteur, ce qui va faciliter l'installation du CDPR. Le prix à payer est bien sûr l'alourdissement de la charge avec les treuils, leur commande et l'alimentation des treuils si l'on cherche à avoir un système autonome. On peut toutefois déporter au sol la commande et l'alimentation en les reliant à la charge par un fil fin qui ne perturbera pas trop le fonctionnement du CDPR. Il est aussi possible d'utiliser comme câbles un fin fil électrique à plusieurs conducteurs qui seront utilisés pour transmettre le courant au treuil et renvoyer les signaux des moteurs vers le système de commande.
Nous avons vu dans la section 9 qu'un moyen d'améliorer les
performances d'un CDPR était d'obtenir direction la position de ![]() à l'aide de lidars. Il existe des lidars plans avec une portée de
9 mètres dont le coût est de l'ordre de 100 euros. On peut
toutefois fabriquer soi même son lidar pour un coût un peu
moindre moyennent que le CDPR soit de taille petite avec des
déplacements possible de l'ordre du mètre. Pour cela vous allez
avoir besoin:
à l'aide de lidars. Il existe des lidars plans avec une portée de
9 mètres dont le coût est de l'ordre de 100 euros. On peut
toutefois fabriquer soi même son lidar pour un coût un peu
moindre moyennent que le CDPR soit de taille petite avec des
déplacements possible de l'ordre du mètre. Pour cela vous allez
avoir besoin:
Maintenant je vous propose d'utiliser le même principe que ci-dessus pour développer un robot parallèle tout à fait original. J'ai utilisé volontairement le mot innovant dans son sens strict d'introduire quelque chose de nouveau pour remplacer quelque chose d'ancien (ce qui ne préjuge en rien sur le fait que le remplacement apportera une amélioration !) et non pas dans un sens actuel où le changement ne se justifie que par le fait qu'il faut impérativement bouger sous peine d'être taxé d'immobilisme, péché capital au yeux des mêmes qui d'un côté prône à tout crin l'innovation tout en justifiant leurs décisions par un définitif tout le monde le fait ...ce qui paraît être l'exact opposé de l'innovation!
Pour cela il vous faudra des moteurs un peu puissants et une charge un peu plus lourde. Par contre vous n'aurez besoin que des moteurs et de leur commande.
Jusqu'à maintenant nous avons parlé de câbles. Mais pour un CDPR comme celui construit comme au dessus on peut très bien remplacer les câbles ...par des feuilles !. Pour cela vous pouvez utilisez

|
Mais les matériaux que vous pouvez utilisez sont très variés. Regardez par exemple la vidéo de cet exemple: le premier robot utilisant du papier toilette ...
L'intérêt d'utiliser des feuilles plutôt que des câbles est de diminuer l'amplitude des mouvements du CDPR en dehors de son plan de fonctionnement. On peut aller un cran plus loin en utilisant comme élément du mouvement de la charge une chaîne de vélo dont on modifiera la longueur par rotation d'un pignon de type vélo.
Il existe comme jouet des blocs de relativement grande taille mais de poids faible, qui permettent de monter des constructions. Un CDPR peut être utilisé pour cette manipulation, qui sera réalisée de manière autonome. Pour cela le CDPR doit être capable de saisir les blocs. Une solution simple pour cela est d'avoir sur le bloc une partie métallique et sur la charge un électroaimant (un dispositif électrique qui, lorsqu'il est alimenté et à proximité de la partie métallique, va accrocher le bloc) et donc une source d'énergie. Reste donc à alimenter et déclencher l'électroaimant: pour cela une solution facile à mettre en oeuvre est d'utiliser un relais émetteur/récepteur radio (qui coûte quelques euros) avec une source d'énergie mise sur la charge et c'est alors l'ordinateur de contrôle qui va déclencher l'électroaimant.
Pour définir géométriquement une ellipse on utilise deux
points particuliers, les foyers, L'ellipse est l'ensemble des points dont la
somme des distances aux foyers est une constante égale à ![]() en
choisissant
en
choisissant ![]() supérieur à la distance
supérieur à la distance ![]() entre les foyers
entre les foyers
Définissons ![]() . Prenons le point de l'ellipse qui
est sur la droite joignant les deux foyers et à droite de
ceux-ci. La distance de ce point au foyer
. Prenons le point de l'ellipse qui
est sur la droite joignant les deux foyers et à droite de
ceux-ci. La distance de ce point au foyer ![]() le plus proche est
le plus proche est
![]() . Déplaçons alors le point sur l'ellipse vers le haut et à
gauche: la distance du point à
. Déplaçons alors le point sur l'ellipse vers le haut et à
gauche: la distance du point à ![]() va alors augmenter jusqu'à ce
que le point se
trouve à nouveau sur la droite des foyers, sa distance au foyer
va alors augmenter jusqu'à ce
que le point se
trouve à nouveau sur la droite des foyers, sa distance au foyer ![]() étant alors
étant alors ![]() . Le mouvement du point peut
continuer si l'on part vers le bas et la droite. La distance à
. Le mouvement du point peut
continuer si l'on part vers le bas et la droite. La distance à ![]() va alors diminuer jusqu'à revenir à
va alors diminuer jusqu'à revenir à ![]() lorsque l'on sera revenu
au point de départ.
lorsque l'on sera revenu
au point de départ.
On va tracer simplement un bout d'ellipse à l'aide d'un CDPR.
Pour cela les foyers seront les points ![]() du CDPR et on fixe
par programme la valeur de
du CDPR et on fixe
par programme la valeur de ![]() . On commence par fixer la longueur
. On commence par fixer la longueur
![]() du
câble 2 à
du
câble 2 à ![]() et celle du câble 1 à
et celle du câble 1 à ![]() . On augmente alors
progressivement la longueur
. On augmente alors
progressivement la longueur ![]() de
de ![]() à
à ![]() et simultanément on diminue
et simultanément on diminue ![]() de façon à ce que l'on ait toujours
de façon à ce que l'on ait toujours
![]() . La charge du CDPR va alors tracer la partie inférieure
d'une ellipse. On peut en modifier la forme en jouant par programme
sur la valeur de
. La charge du CDPR va alors tracer la partie inférieure
d'une ellipse. On peut en modifier la forme en jouant par programme
sur la valeur de ![]() . On peut d'ailleurs visualiser le tracé en
plaçant un marqueur sur la charge et un plan légèrement
incliné sur lequel va s'appuyer le marqueur, permettant ainsi de
visualiser la
trajectoire du point
. On peut d'ailleurs visualiser le tracé en
plaçant un marqueur sur la charge et un plan légèrement
incliné sur lequel va s'appuyer le marqueur, permettant ainsi de
visualiser la
trajectoire du point ![]() .
.
On peut aussi tracer d'autres formes en utilisant le même
principe: par exemple une partie d'hyperbole où là c'est la
différence entre les deux distances aux foyer qui doit être
constante. On peut faire de même pour une parabole.
De manière générale il est facile de faire tracer par le robot
toute courbe plane paramétrique c'est à dire qui se décrit par
![]() . En effet on a vu dans les sections
précédentes que l'on exprimer la longueur des câbles à partir
de la donnée de
. En effet on a vu dans les sections
précédentes que l'on exprimer la longueur des câbles à partir
de la donnée de ![]() ce qui veut dire que l'on peut obtenir la
longueur de chacun des câbles sous la forme paramètrique
ce qui veut dire que l'on peut obtenir la
longueur de chacun des câbles sous la forme paramètrique
![]() . Pour faire réaliser la trajectoire
lorsque, par exemple,
. Pour faire réaliser la trajectoire
lorsque, par exemple, ![]() varie entre 0 et 10 on découpe
l'intervalle [0,10] en intervalles [0,t1],[t1, t2],...[tn,10] en
choisissant les
varie entre 0 et 10 on découpe
l'intervalle [0,10] en intervalles [0,t1],[t1, t2],...[tn,10] en
choisissant les ![]() de façon à ce que la variation maximale de
longueur des câbles lorsque l'on passe de
de façon à ce que la variation maximale de
longueur des câbles lorsque l'on passe de ![]() à
à ![]() soit
de l'ordre de quelques centimètres. Pour réaliser la trajectoire
il suffit alors de viser à l'instant
soit
de l'ordre de quelques centimètres. Pour réaliser la trajectoire
il suffit alors de viser à l'instant ![]() les longueurs calculées
pour l'instant
les longueurs calculées
pour l'instant ![]() et lorsque les longueurs des câbles s'approchent de ces
longueurs de passer à l'instant suivant.
et lorsque les longueurs des câbles s'approchent de ces
longueurs de passer à l'instant suivant.
Prenons un CDPR à 2 câbles avec ![]() ,
, ![]() a la même
hauteur. On place la charge à la verticale de
a la même
hauteur. On place la charge à la verticale de ![]() en relâchant le
câble 1 jusqu'à ce qu'il pende. Ce faisant le triangle
en relâchant le
câble 1 jusqu'à ce qu'il pende. Ce faisant le triangle ![]() est rectangle qui a comme côté
est rectangle qui a comme côté ![]() (et on connaît la
distance
(et on connaît la
distance ![]() entre ces points) et
entre ces points) et ![]() dont la longueur est la
différence de hauteur
dont la longueur est la
différence de hauteur ![]() entre
entre ![]() et
et ![]() . Le théorème de
Pythagore dit que le carré de la distance de
. Le théorème de
Pythagore dit que le carré de la distance de ![]() à
à ![]() est
est
![]() . Si on enroule maintenant le câble 1 tout en mesurant sa
longueur
. Si on enroule maintenant le câble 1 tout en mesurant sa
longueur ![]() on verra que la longueur
on verra que la longueur ![]() au moment où le
câble se tendra vérifie
au moment où le
câble se tendra vérifie
![]() .
.
Maintenant déplacer la barre ![]() en faisant tourner
en faisant tourner ![]() autour de
autour de ![]() (en maintenant le câble 1 en tension)
d'un tour complet tout en bougeant
(en maintenant le câble 1 en tension)
d'un tour complet tout en bougeant ![]() de façon
à ce que le câble 2 reste tendu. Durant cette opération il faut
aussi s'assurer que le feutre est au contact du tableau.
de façon
à ce que le câble 2 reste tendu. Durant cette opération il faut
aussi s'assurer que le feutre est au contact du tableau.
Votre mouvement va permettre de
tracer la trajectoire de ![]() sur le tableau. Vous allez constater que
la trajectoire
se décompose en deux parties: une quasiment rectiligne et l'autre
qui part de la fin de la partie rectiligne et ramène
sur le tableau. Vous allez constater que
la trajectoire
se décompose en deux parties: une quasiment rectiligne et l'autre
qui part de la fin de la partie rectiligne et ramène ![]() au début
de cette partie.
au début
de cette partie.
Si l'on remplace les câbles par des barres et que l'on fait tourner l'une de ces barres on obtient un mécanisme qui transforme un mouvement rotatif en un mouvement quasiment linéaire sur une partie de la trajectoire avec un seul moteur et sans articulation ou came compliquée : c'est ce l'on appelle un inverseur et celui là s'appelle le cheval de Tchebyshev. Il a été utilisé pour faire la première machine marchante exposée lors de l'Exposition Universelle à Paris en 1878.
La vidéo ci-dessous montre le mouvement que vous allez obtenir.
Bien entendu avec le CDPR à 2 câbles on peut réaliser un segment de droite quasi-parfait. Programmer la réalisation d'un segment droite avec un CDPR est relativement facile. Pour le retour vers le départ du segment de droite à partir de sa fin on peut tout simplement demander au CDPR d'avoir comme longueurs de câble celles qu'il avait au début du segment de droite.
Pour vous aider, si la distance entre ![]() et
et ![]() est
est ![]() et que
vous voulez réaliser un segment de droite à la hauteur z0
(négative) le carré de la longueur du câble 2 est donnée par
et que
vous voulez réaliser un segment de droite à la hauteur z0
(négative) le carré de la longueur du câble 2 est donnée par
La vidéo ci-dessous montre la trajectoire qui va être obtenue. Bien entendu la forme de la trajectoire de retour va varier selon la géométrie du CDPR et le choix de x1, x2.
Une télécommande de TV envoit des signaux codés par infra-rouge avec une séquence spécifique pour chaque touche. Ce signal peut être capté par un composant de très bas coût (quelques euros) et les informations reçues par ce capteur peuvent être facilement traitées par un Arduino. On peut donc associer à chaque touche de la télécommande un ordre pour le CDPR (par exemple enrouler/dérouler les câbles, augmenter la vitesse du CDPR ou exécuter une trajectoire).
Le fonctionnement d'un CDPR nécessite une collaboration entre les treuils et éventuellement la charge pour obtenir un fonctionnement correct. Les échanges se font dans les deux sens: le treuil donne des informations (par exemple la valeur du codeur de son moteur) et en reçoit (par exemple un déplacement du moteur). Pour les CDPR de petite dimensions ces échanges se font de manière filaire mais cette solution devient de plus en plus difficile à utiliser au fur et à mesure que la taille du CDPR augmente. La solution est de rendre chaque treuil autonome, aussi bien en terme d'énergie que de contrôle. Il faut alors assurer la communication entre les treuils pour faire fonctionner le CDPR. La solution simple est d'utiliser un réseau local avec un Wifi. Les ordinateurs des treuils vont alors utiliser ce réseau pour échanger les informations et c'est un bon cas d'étude pour la programmation d'un réseau local.