About
I am PhD student within the TITANE team at INRIA Sophia Antipolis.
My doctoral studies on 'Indoor scene reconstruction' are supervised by Florent Lafarge and Pierre Alliez.
I received my diploma (2009) in computer science from the University of Bremen. From 2009 to 2012 I worked at MeVis Medical Solutions AG as a research engineer and additionally visited math lectures at the University of Bremen.
My research interests include:
- Scene reconstruction
- Point cloud processing
- Geometry processing
Publications
 |
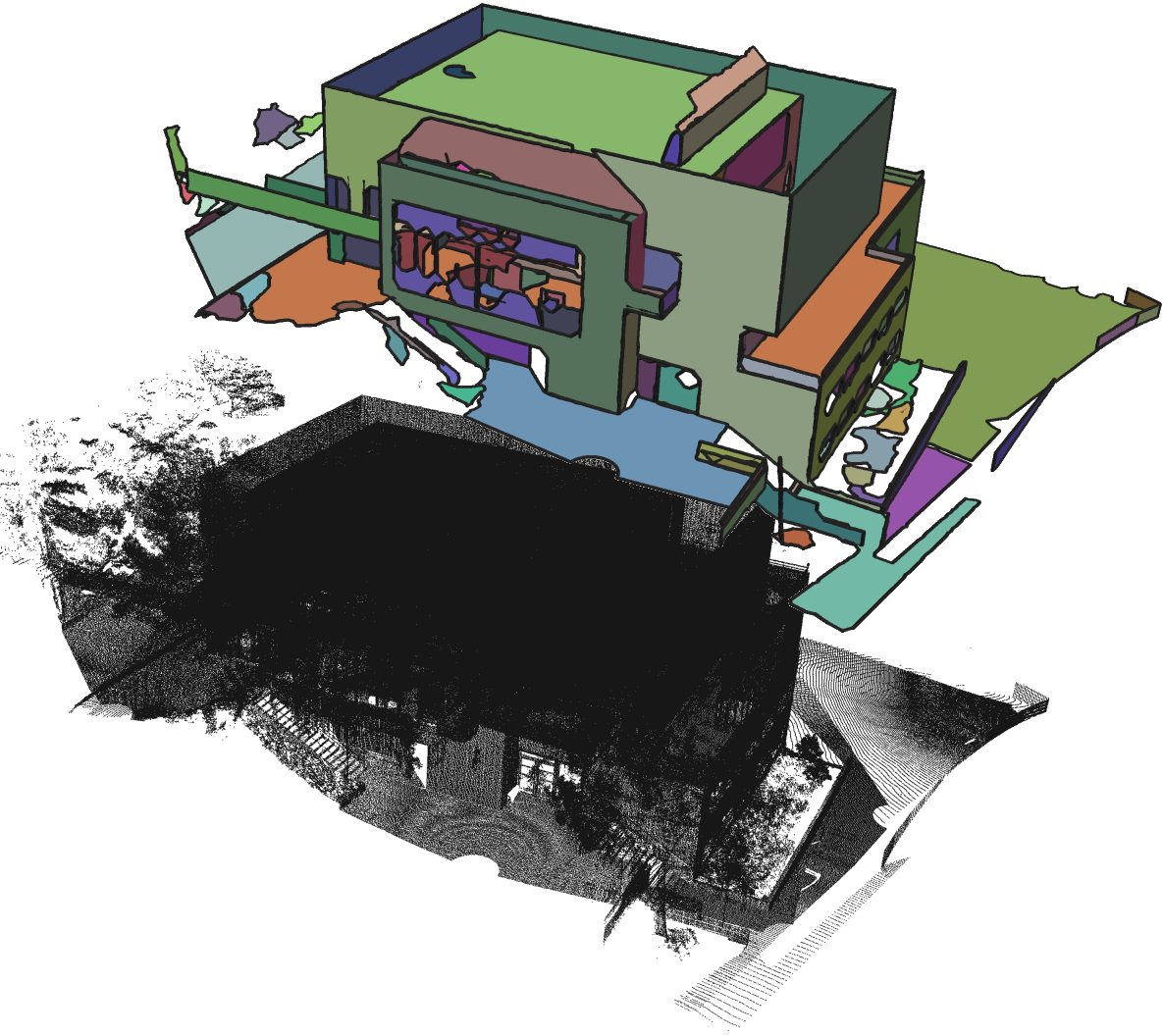
Indoor Scene Reconstruction using Primitive-driven Space Partitioning and Graph-cut
Sven Oesau, Florent Lafarge, Pierre Alliez
Proc. of Eurographics workshop on Urban Data Modeling and Visualisation (UDMV), Girona, Spain, 2013
Abstract:
We present a method for automatic reconstruction of permanent structures of indoor scenes, such as walls, floors and ceilings, from raw point clouds acquired by laser scanners. Our approach employs graph-cut to solve an inside/outside labeling of a space decomposition. To allow for an accurate reconstruction the space decomposition is aligned with permanent structures. A Hough Transform is applied for extracting the wall directions while allowing a flexible reconstruction of scenes. The graph-cut formulation takes into account data consistency through an inside/outside prediction for the cells of the space decomposition by stochastic ray casting, while favoring low geometric complexity of the model. Our experiments produces watertight reconstructed models of multi-level buildings and complex scenes.
[pdf]
[bibtex]
|
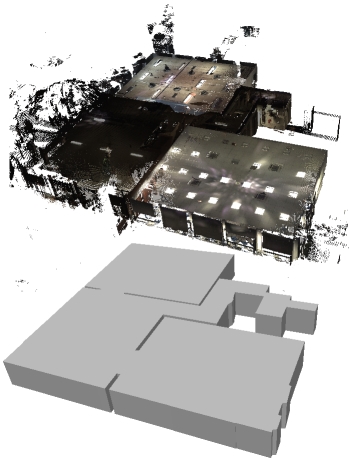 |
Indoor Scene Reconstruction using Feature Sensitive Primitive Extraction and Graph-cut
Sven Oesau, Florent Lafarge, Pierre Alliez
ISPRS Journal of Photogrammetry and Remote Sensing Volume 90 (April 2014)
Best Journal Paper Award 2014
Abstract:
We present a method for automatic reconstruction of permanent structures, such as walls, floors and ceilings, given a raw point cloud of an indoor scene. The main idea behind our approach is a graph-cut formulation to solve an inside/outside labeling of a space partitioning. We first partition the space in order to align the reconstructed models with permanent structures. The horizontal structures are located through analysis of the vertical point distribution, while vertical wall structures are detected through feature preserving multi-scale line fitting, followed by clustering in a Hough transform space. The final surface is extracted through a graph-cut formulation that trades faithfulness to measurement data for geometric complexity. A series of experiments show watertight surface meshes reconstructed from point clouds measured on multi-level buildings.
[pdf]
[bibtex]
|
 |
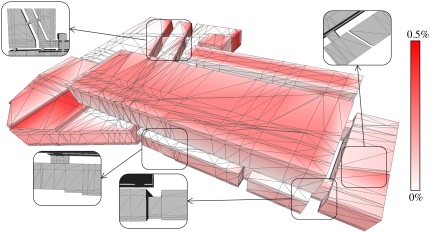
Planar Shape Detection and Regularization in Tandem
Sven Oesau, Florent Lafarge, Pierre Alliez
Computer Graphics Forum conditionally accepted
Abstract:
We present a method for planar shape detection and regularization from raw point sets. The geometric modeling and processing of man-made environments from measurement data often relies upon robust detection of planar primitive shapes. In addition, the detection and reinforcement of regularities between planar parts is a means to increase resilience to missing or defect-laden data as well as to reduce the complexity of models and algorithms down the modeling pipeline. The main novelty behind our method is to perform detection and regularization in tandem. We first sample a sparse set of seeds uniformly on the input point set, then perform in parallel shape detection through region growing, interleaved with regularization through detection and reinforcement of regular relationships (coplanar, parallel and orthogonal). In addition to addressing the end goal of regularization, such reinforcement also improves data fitting and provides guidance for clustering small parts into larger planar parts. We evaluate our approach against a wide range of inputs and under four criteria: geometric fidelity, coverage, regularity and running times. Our approach compares well with available implementations such as the efficient RANSAC-based approach proposed by Schnabel and co-authors in 2007.
[to appear]
|
|