Certains robots peuvent avoir des degrés de liberté qui changent
selon leur géométrie ou leur mode de fonctionnement. Par exemple
le 3-UPU peut être un robot présentant uniquement soit des
translations soit des rotations. Cette section présente des robots
de ce type.
Some robots may have d.o.f. that change according to the geometry or
the working mode of the robot. For example the 3-UPU may be either a
translational or an orientational robot. We present in this section
some of such robots.
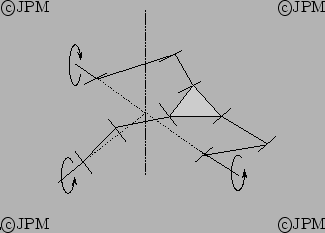
Le robot DYMO de Zlatanov [
190] qui présente 5 mode de
fontionnement: translation spatiale, orientation, un mode robot plan,
un mode bloqué et un mode mélant translation et rotation. Une
liste exhaustive de ce type de robot est donné en [
93]
The DYMO robot with 5 modes: 3 d.o.f. translation or orientation, 3
planar d.o.f., a locked mode and a mode mixing translation and
orientation. An exhaustive list of such robots is provided in [
93]
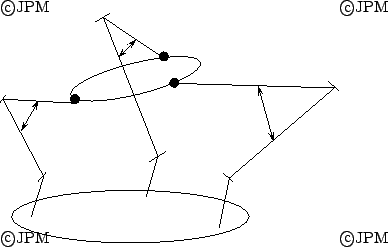
The linear actuator control the angle between the two links close to
the platform. If the axis of the revolute joint close to the base are
in general position we get 3 orientational d.o.f. while if they are
all horizontal we get two orientations and a translation.