Direction
des Relations Internationales (DRI)
Programme
INRIA "Equipes Associées"
BILAN TRIENNAL /
THREE-YEAR REVIEW
|
ATTENTION
: ce dossier doit obligatoirement être rédigé en
anglais
Please fill in this review in ENGLISH
|
EQUIPE ASSOCIEE
ASSOCIATE
TEAM
|
SHAPES
|
|
sélection / selected in
year
|
2007
|
|
Equipe-Projet INRIA / Research
team :
Ariana
|
Organisme étranger partenaire / Foreign
Partner Institution: Florida State University
|
|
Centre de recherche INRIA / Research
Center : Sophia Antipolis Mediterrannée
Thème
INRIA / Scientific theme :
Perception, cognition,
interaction.
|
Pays/Country :
USA
|
La
collaboration en bref / The Collaboration in brief
|
Titre de la thématique de
collaboration / Title of the collaboration theme :
Statistical theory of
configurations of shapes for analyzing aerial and satellite
images
|
|
Descriptif (environ
10 lignes)
/
Summary (approximately 10 lines)
:
The aim of this
Associated Team is to combine the competences of EPI Ariana
(INRIA/I3S), directed by Josiane Zerubia, in image processing,
stochastic geometry, and MCMC techniques, with those of the team
led by Anuj Srivastava in the Department of Statistics at Florida
State University, in shape analysis and shape statistics applied
to images. The synergy between the two groups via the Associated
Team will allow advances in the problem of the detection of
objects in high resolution satellite and aerial imagery, on the
application side, as well as in the theory of shape modeling and
statistics.
|
BILAN SYNTHETIQUE DE LA
COLLABORATION / SYNTHESIS OF THE COLLABORATION
|
|
INRIA
Nombre/Number
|
Partenaire(s)/
Partner
Nombre/Number
|
|
Chercheurs seniors impliqués
|
Senior researchers involved
|
3
|
4
|
|
Post-doctorants
|
Post-doctoral graduates
|
1
|
0
|
|
Doctorants
|
PhD students
|
2
|
3
|
|
Stagiaires
|
Interns
|
0
|
1
|
|
Thèses en co-tutelle soutenues
|
Co-supervised defended PhD
|
0
|
0
|
|
Thèses en co-tutelle en cours
|
Current co-supervised PhD
|
0
|
0
|
|
Total des thèses soutenues
|
Global defended PhD
|
1
|
1
|
|
Total des thèses en cours
|
Global current PhD
|
1
|
2
|
|
Visites de l'équipe partenaire (hors
colloques)
|
Travels to the partners (conferences not
included)
|
11
|
9
|
|
Nombre de Publications/Number of
publications
|
9
|
|
Quels sont, selon
vous, les points forts de cette collaboration et la valeur ajoutée
de l'Equipe Associée ?
/ In your opinion, what
are the main results and what is the added value of the Associate
Team ?
(maximum 5
lignes)
The main results are: the development of the
SRV representation for curves in Rn, and the associated
metrics and algorithms; the combination of shape tools and
differential geometry leading to successful object recognition in
cluttered point clouds; the development of computationally
feasible marked point processes for general object shapes. None of
these results could have been achieved without the collaboration
enabled by the Associated Team funding. We note that the French
Space Agency CNES is interested in marked point processes for
general object shapes for the analysis of satellite images.
|
|
Comment
envisagez-vous l'avenir de cette collaboration ?
(renouvellement de l'Equipe Associée, poursuite sur fonds
propres, projet européen ou autre, arrêt de la
coopération...)
/
How do you see the evolution of this cooperation
(renewal of the Associate Team, european project or
other-funding project, end of the cooperation...)
(maximum
5 lignes)
During the last year, the PhD work of Maria
Kulikova has moved towards a fusion of the approaches to shape
modeling and object extraction under investigation in Associated
Team Shapes and the other Associated Team involving EPI Ariana,
Odessa. When Odessa comes to an end next year, we envisage
submitting a proposal for a single, new Associated Team involving
all the partner teams of both Shapes and Odessa, and combining
their research themes into a unified whole, stressing the
commonalities and complementarities of the various approaches.
|
BILAN SCIENTIFIQUE /
SCIENTIFIC REPORT
Description de l'activité
scientifique de l'équipe associée et des résultats
obtenus au cours des 3 dernières années : publications,
communications, organisation de colloques, formation, soutenances de
thèse, valorisation économique, sociale, industrielle,
dépôt de brevets ... (maximum 5 pages)
Please
detail the Associate Team scientific activity as well as the results
obtained in the last 3 years : publications, communications,
organization of conferences, training, defended PhD, valorization,
patents filing.
Scientific Results
Shape analysis of elastic curves in Euclidean
spaces
This work
introduces a square-root velocity (SRV) representation for analyzing
shapes of curves in Euclidean spaces using an elastic metric. The SRV
representation has several advantages: the well-known elastic metric
simplifies to the L2 metric, the reparameterization group acts by
isometries, and the space of unit length curves becomes the familiar
unit sphere. The shape space of closed curves is a submanifold of the
unit sphere, modulo rotation and reparameterization groups, and one
finds geodesics in that space using a path-straightening approach.
The
choice of a shape representation and a Riemannian metric are
critically important for shape analysis and description – for
improved understanding, physical interpretation, and efficient
computing. This work introduces a particularly convenient
representation for curves in Rn
that enables a simple physical interpretation of the
'energy' of shape deformations. This representation is motivated by
the well-known Fisher-Rao metric, used previously for imposing a
Riemannian structure on the space of probability densities; taking
the positive square-root of densities results in a simple Euclidean
structure where geodesics, distances, and statistics are
straightforward to compute. A similar idea was introduced by Younes
[1] and later used in Younes et
al. [2] for studying shapes of planar curves under an elastic metric.
The representation used in our work is similar to these
earlier ideas, but is sufficiently different to be applicable
to curves in arbitrary Rn.
The
main contributions of this research are as follows:
Introduction
of the square-root velocity (SRV) representation for closed curves
in Rn. This has the following advantages:
Under
this representation, the previously-used elastic metric becomes a
simple L2 metric for any n.
The
action of the reparameterization group on the pre-shape space of
parametrized curves is by isometries.
The
space of fixed length curves is a Hilbert sphere with well-known
geometry.
The
use of a numerical approach, termed path-straightening, for finding
geodesics between shapes of closed elastic curves. It uses a
gradient-based iteration to find a geodesic where, using the Palais
metric on the space of paths, the gradient is available in a
convenient analytical form.
The
use of a gradient-based solution for finding the optimal
reparameterization of curves when finding geodesics between their
shapes. We studied the relevant strengths and weaknesses of this
gradient solution versus the commonly used Dynamic Programming (DP)
algorithm.
The
application and demonstration of this framework to: (i) shape
analysis of cylindrical helices in R3 for use in studies
of protein backbone structures, (ii) shape analysis of 3D facial
curves, (iii) development of a wrapped normal distribution to
capture shapes in a shape class, and (iv) parallel transport of
deformations from one shape to another. The last item is motivated
by the need to predict individual shapes or shape models for novel
objects, or novel views of the objects, using past data.
Publications
Conference
Paper:
S.
H. Joshi, A. Srivastava, E. Klassen and I. H. Jermyn, An Efficient
Representation for Computing Geodesics Between n-Dimensional Elastic
Curves, IEEE
Conference on Computer Vision and Pattern Recognition (CVPR),
Minneapolis, MN, June 2007.
Conference
Paper: A. Srivastava, I. H. Jermyn and S. Joshi. Riemannian
Analysis of Probability Density Functions with Applications in
Vision, IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), Minneapolis, MN, June 2007.
Conference
Paper: S.H. Joshi, A. Srivastava, E. Klassen, and I. H.
Jermyn, Removing Shape-Preserving Transformations in Square-Root
Elastic (SRE) Framework for Shape Analysis of Curves, Proceedings
of Sixth International Workshop on Energy Minimization Methods in
Computer Vision and Pattern Recognition (EMMCVPR), pages
387-398, Hubei, China, August 2007.
Journal
Paper: A. Srivastava, E. Klassen, S. H. Joshi, and I. H.
Jermyn, Shape Analysis of Elastic Curves in Euclidean Spaces, Under
review at Transactions of Pattern Analysis and Machine
Intelligence, revised, May 2009.
Looking for shapes hidden in two-dimensional,
cluttered point clouds
We
study the problem of classifying shapes in point clouds that are made
of sampled contours corrupted by clutter and
observation noise. Taking an analysis-by-synthesis approach, we
simulate high-probability configurations of sampled contours using
models learned from the training data to evaluate the given test
data. To facilitate simulations, we develop statistical models for
sources of (nuisance) variability: (i) shape variations within
classes, (ii) variability in sampling continuous curves, (iii) pose
and scale variability, (iv) observation noise, and (v) points
introduced by clutter. The variability in sampling closed curves into
finite points is represented by positive diffeomorphisms of a unit
circle and we derive probability models on these functions using
their square-root forms and the Fisher-Rao metric. Using a Monte
Carlo approach, we simulate configurations using a joint prior on the
shape-sample space and compare them to the data using a likelihood
function. Average likelihoods of simulated configurations lead to
estimates of posterior probabilities of different classes and, hence,
Bayesian classification.
The process of
estimating boundaries in images or videos uses low-level techniques
that extract a set of primitives
- points, edges, arcs, etc. - in the image plane, resulting in a
cloud of primitives. Therefore, an important problem in object
recognition is to (probabilistically) relate a given set of
primitives to the predetermined (continuous) shape classes and to
classify the shape of this set using a fully statistical framework.
|

|
|
|
|
|
(a)
Data
|
(b)
Clutter removal
|
(c)
Ordering
|
(d)
Classification
|
|
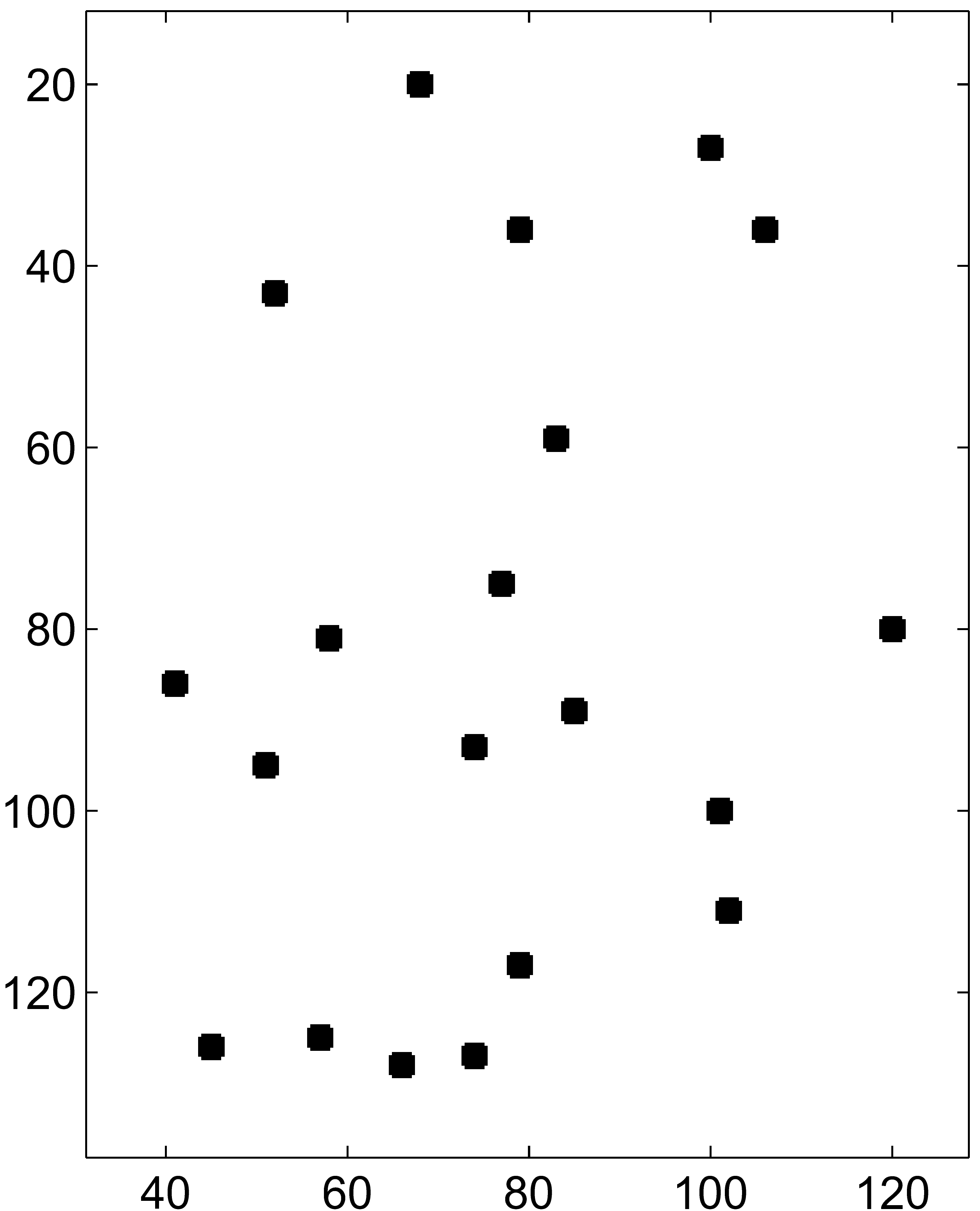
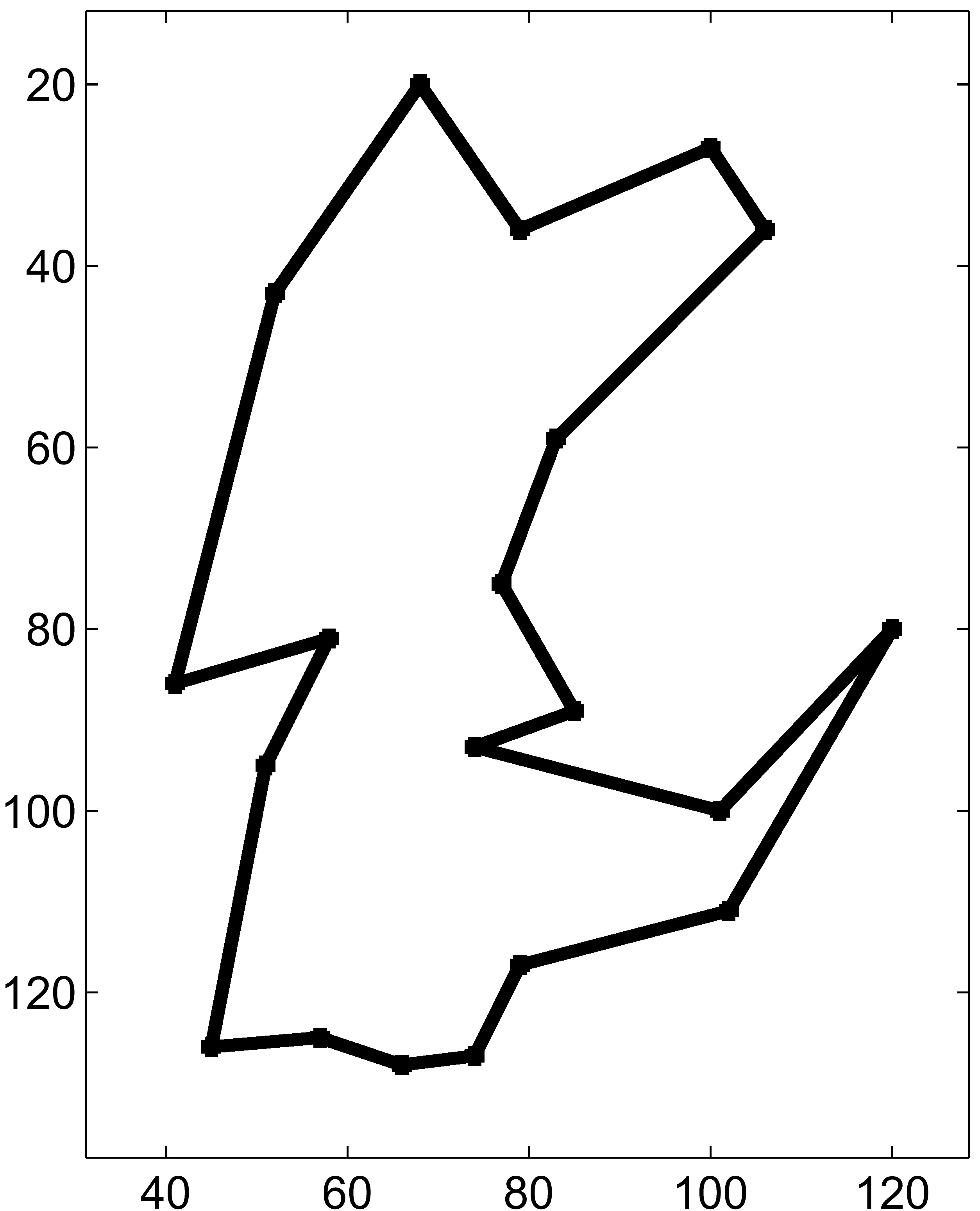
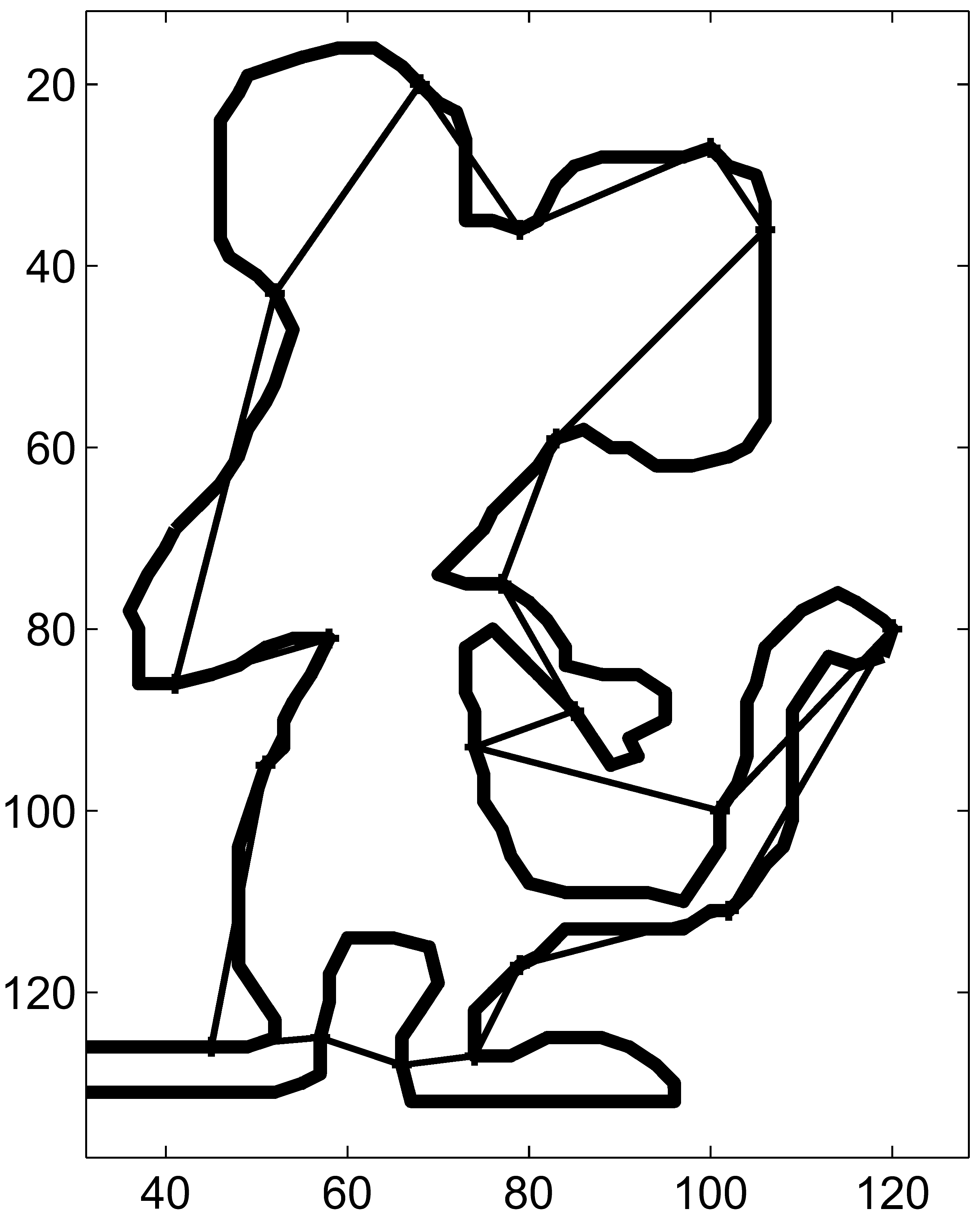
Figure 1:
Problem Challenges: for the point set shown in left, the points
belonging to clutter are removed.
The remaining points are ordered and classified into a shape
class.
|
Problem
challenges
The
biggest challenge in this problem is to select and organize a large
subset of given primitives into shapes that resemble shapes of
interest. The number of permutations for organizing primitives into
possible shapes is huge. For example, the number of possible polygons
using 40 distinct points in a plane is of the order 1047.
Even if we take only 20 points, out of the given 40, to form a
polygonal shape, the number of possibilities is still high ≈
1029. To form and evaluate all shape permutations is
impossible. Our solution is to analyze these configurations through
synthesis, i.e. synthesize high-probability configurations
from known shape classes and measure their similarities with the
data. Although this approach has much less complexity compared to the
bottom-up combinatoric approach, the joint variability of all the
unknowns is still enormous. One has to put an additional structure
into the problem by breaking down the variability into components,
and probabilistically modeling the components individually. Through
the examples presented in Figure 1 we will explain these components.
Background
Rejection: Perhaps
the most difficult issue is to determine which belong to the
object contour and which belong to the background (clutter).
Discarding clutter points takes us to go from (a) to (b) in Figure
1.
Ordering:
Secondly, the ordering of primitives (along a curve) is most
probably unknown. If n primitives are used in forming a polygonal
shape, there are n! possibilities. Having a specific ordering
will simplify our problem from (b) to (c) in Figure 1.
Classification:
Finally, given an ordered set of primitives, all of them belonging
to the curve, the
task of shape (class) determination, that is going from (c) to (d),
is still challenging, although not as difficult as going from (a) to
(d). This part can become especially difficult when the shapes are
heavily under sampled and the observation noise is high. To reach a
statistical framework for this classification, we have to develop
models for variabilities associated with shapes, the sampling
process, and the observation noise.
Bayesian
Solution
We have proposed and implemented a fully Bayesian
approach that follows the paradigm of analysis by synthesis. The idea
is to understand a given point cloud by by synthesizing
high-probability configurations of points x generated by the object
from prior models on shape given class, P(q|C), and on sets of sample
points on the shape given class, P(s|C). These synthesized
configurations are compared with the data y using a likelihood
function based on the product of a Gaussian distribution for the
distances between points in x and associated points in y, and a
Poisson distribution for the points in y not associated to points in
x, i.e. supposed generated by the background. The likelihood
is obtained by optimizing over rotations, translations, and scaling
of x, and over associations between the points of x and those of y.
We use the standard Euclidean registration techniques for the former
and the Hungarian algorithm for the latter. We can then estimate the
posterior probability for class C, P(C|y), as follows. We:
(i) randomly generate a Poisson random variable n (number of sample
points on the curve)�, (ii) generate a shape q ∼
P(q|C)
from the shape model for class C, (iii)
generate a sampling function (diffeomorphism of the circle creating n
points on the curve starting from uniformly spaced points Un)
s
∼ P(s
|C), and (iv) evaluate the likelihood of the resulting point set x =
q(s(Un))
by solving the association and the registration problems mentioned
earlier. Averaging of the likelihood over
multiple realizations of n, q and s leads
to a Monte Carlo estimate of the posterior. The method works well:
the posterior probabilities are typically highest for the class to
which the object in the image belongs, even though the training
shapes used to develop the shape models P(q|C) were distinct and
sometimes quite different from the shapes present in the test images.
Publications
Conference
Paper:
A. Srivastava and I. H. Jermyn, Bayesian Classification of Shapes
Hidden
in Point Clouds, Proceedings
of 13th Digital Signal Processing Workshop,
Marco Island, FL, January 2009.
Journal
Paper: A.
Srivastava and I. H. Jermyn, Looking for Shapes in Two-Dimensional,
Cluttered Point Cloud, IEEE
Transactions on Pattern Analysis and Machine Intelligence,
vol. 31, no. 9, pages 1616-1629, September 2009.
Tree crown classification
We have studied the improvement in object
classification due to shape descriptors. The application addressed is
tree species classification based on tree crown contours extracted
from high resolution images. We consider a forest in Sweden where
only four species occur (birch, aspen, spruce and pine). A first
classification is performed using radiometric and textural features.
The textural features are derived from the co-occurrence matrices.
Therefore, we use first and second order statistics to describes tree
crowns. We then consider the shape description proposed by Srivastava
et al. [3] and the associated metric. We define some features from
this shape representation by considering the geodesic distance
between the considered shape and a disk. We add also some parameters
characterizing the angle function of the curve describing the shape
contour. We show that these shape descriptors improve tree crown
classification performance.
Publications
Conference
paper: M. S. Kulikova, M. Mani, A. Srivastava, X. Descombes and
J. Zerubia,
Tree Species Classification Using Radiometry, Texture
and Shape Based Features, Proc. European Signal Processing
Conference (EUSIPCO), 2007.
Shape detection using multiple birth and death
dynamics
Over the past ten years, EPI Ariana has developed
a methodology based on marked point processes for the detection of a
collection of objects in an image. It consist in modeling the output
as a configuration of objects, each described by a small number of
parameters. Numerous applications have been addressed within this
framework. However, one limit of this approach lies in the simplicity
of the geometric description of the objects. Disks or ellipses have
been used for tree detection, rectangles for building footprint
extraction or segments for road network delineation. Recently, a new
optimization algorithm has been proposed that outperforms the
classical RJMCMC algorithm [4]. We therefore can expect to embed more
complex descriptions of objects into the marked point process. In
this context, we have proposed a marked point process modeling
collections of potentially arbitrary shapes. To construct the set of
objects for a given image, we evolve an active contour under gradient
descent starting from a disk, the radius being the mark of the point
in the configuration. The energy of the active contour contains two
data terms: a Gaussian term inside and outside the shape and a
contrast term along the contour; and two prior terms: contour length
and another based on Fourier descriptors of the shape. In this way,
by varying the position and the radius of the initial circle, we
generate a set of objects adapted both to the data and to the prior
information contained in the energy. We then invoke the marked point
process framework to address the detection of multiple objects. The
associated energy includes the active contour energy and a repulsive
term encouraging objects not to overlap. The final configuration is
obtained by simulated annealing based on multiple birth and death
dynamics. We have applied this model to tree crown extraction. In
terms of object detection, the results obtained provide performance
similar to marked point processes based on simple parametric objects
(ellipses in this case), but with a more detailed description of
individual object geometry. Therefore, simple shapes like ellipses
appear to be better adapted to counting objects, whereas, for
example, for classifying trees into species or to evaluate the crown
size, the approach described here is more accurate.
Publications
Conference
paper: M. S. Kulikova, I. H. Jermyn, X. Descombes, E.
Zhizhina and J. Zerubia, Extraction of arbitrarily shaped objects
using stochastic multiple birth-and-death dynamics and active
contours, IS&T/SPIE Electronic Imaging, San Jose, USA,
January 2010.
Conference
paper: M. S. Kulikova, I. H. Jermyn, X.
Descombes, E. Zhizhina and J. Zerubia, A marked point process
model with strong prior shape information for extraction of
multiple, arbitrarily-shaped objects., Proc. IEEE SITIS,
Marrakesh, Morocco, December 2009.
References
[1] L.
Younes, Computable elastic distance between shapes, SIAM
Journal of Applied Mathematics,
58(2):565–586, 1998.
[2] L.
Younes, P. W. Michor, J. Shah, D. Mumford, and R. Lincei, A metric on
shape space with explicit geodesics, Matematica
E Applicazioni,
19(1):25–57, 2008.
[3] A. Srivastava, S.
Joshi, W. Mio and B .Liu, Statistical Shape Anlaysis: Clustering,
Learning and Testing, IEEE Transactions on Pattern Analysis and
Machine Intelligence,
27(4), pages 590-602, April 2005.
[4] X. Descombes, R.
Minlos and E. Zhizhina, Object Extraction Using a Stochastic
Birth-and-Death Dynamics in Continuum, Journal of Mathematical
Imaging and Vision, 33, pages 347-359, 2009.
Visits and Seminars
2007
April
2-13, 2007 - Visit to FSU, Tallahassee, Florida - Participants: X.
Descombes, I. H. Jermyn,and M.S. Kulikova.
April
6, 2007 – 'Shape Day' Workshop at FSU. Participants: X.
Descombes, I. H. Jermyn, S. Joshi, M.S. Kulikova, and A. Srivastava.
June
1-15, 2007 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: S. Joshi.
September
4-8, 2007 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: V. Patrangenaru.
September
20-26, 2007 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: A. Srivastava.
2008
April
5-12, 2008 - Visit to the FSU - Participant: I. H. Jermyn.
April
7-11, 2008 - Visit to the FSU - Participant: X. Descombes.
June
3-8, 2008 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: A. Srivastava.
July
2-6, 2008 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: E. Klassen.
July
2, 2008 - Seminar at INRIA, Sophia-Antipolis, France - Speaker: E.
Klassen.
July
7-11, 2008 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: A. Barbu.
Decembre
14-22, 2008 - Visit to the FSU - Participants: A. El Ghoul, C.
Benedek.
Decembre
21, 2008 - Seminar at the FSU - Speakers: A. El Ghoul, C. Benedek.
Decembre
13-24, 2008 - Visit to the Ariana, INRIA, Sophia-Antipolis, France -
Participant: J. Su.
2009
February
23-28, 2009 - Visit to the FSU - Participant: M. S. Kulikova.
February
27, 2009 - Seminar at FSU - Speaker: M. S. Kulikova.
March
30 - April 5, 2009 - Visit to the FSU - Participant: I. H. Jermyn.
June
7-12, 2009 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participant: A. Srivastava.
June
8, 2009 - Seminar at INRIA, Sophia-Antipolis, France - Speaker: A.
Srivastava.
June
2-14, 2009 - Visit to Ariana, INRIA, Sophia-Antipolis, France -
Participants: S. Kurtek, W. Liu.
December
13-18, 2009 - Visit to Ariana, INRIA, Sophia-Antipolis, France –
Participant: A. Srivastava.
Training
The following junior scientists visited the
corresponding partner team during the lifetime of the project:
INRIA: A. El Ghoul (PhD), M. S. Kulikova
(PhD), and C. Benedek (Post-doc). All of these scientists gave
seminars during one or more of their visits.
FSU: S. Joshi (PhD), W. Liu (PhD), S.
Kurtek (PhD), and J. Su (Master).
PhD defences
Shantanu Joshi: July, 2007. Title:
Inference
in Shape Spaces with Applications to Computer Vision.
Maria Kulikova: December, 2009. Title: Shape
Recognition for Image Scene Analysis.
©
INRIA - mise à jour le 08/07/2009