Definitions and Notations 1/3
Marked point processes
Let  be the space of interest, called the state space, typically a subset of
be the space of interest, called the state space, typically a subset of
 . A configuration of objects in is an unordered list of objects. A point process
. A configuration of objects in is an unordered list of objects. A point process
 in is a random variable whose realizations are random configurations of points.
in is a random variable whose realizations are random configurations of points.
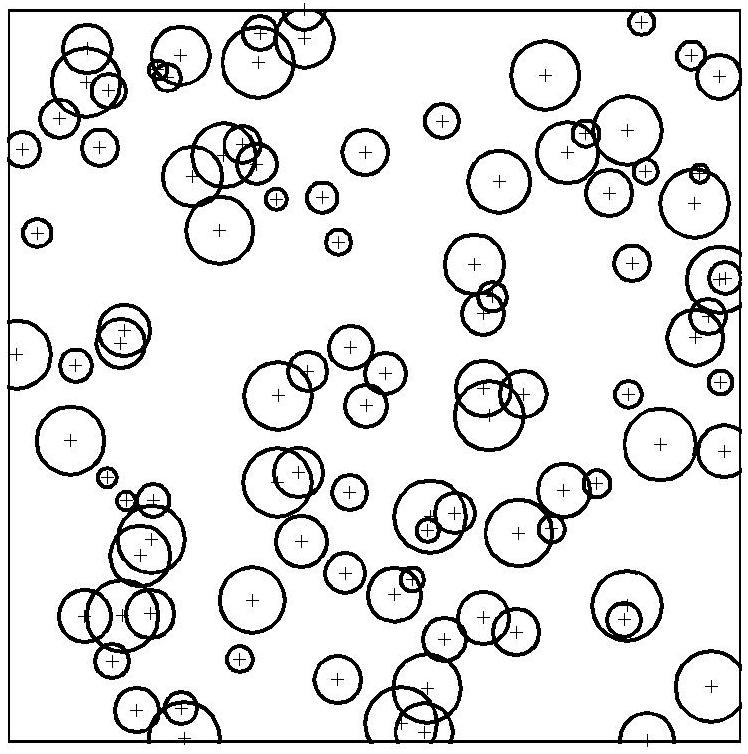
The most obvious example of point processes is the homogeneous Poisson process (cf Fig. (2)), which induces a complete spatial randomness on , given the fact that the positions are uniformly and independently distributed.
Figure 2 :
Realizations of an homogeneous discs Poisson process of mean 100 (click to enlarge).
|
|
To apply point processes to object extractions in images, the idea is to model the observed data
 (cf Fig. (1)) as a realization of a marked point process of simple geometric objects. The space of the positions
(cf Fig. (1)) as a realization of a marked point process of simple geometric objects. The space of the positions
 is given by the image size, while the space of the marks
is given by the image size, while the space of the marks
 is a compact set of
is a compact set of
 .
.