NEMO aims to develop numerical methods to control a micro-robot swimmer in the arteries of the human body.
These robots could deliver drugs specifically to cancer cells before
they form new tumors, thus avoiding metastasis and the traditional
chemotherapy side effects.
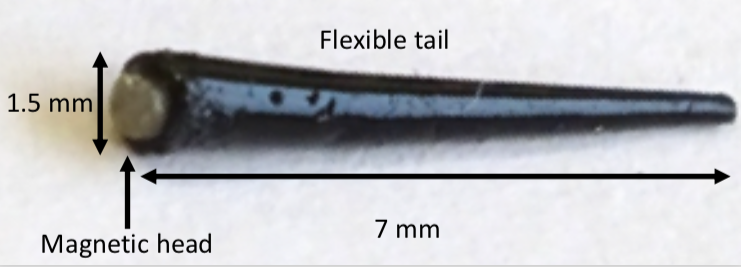
NEMO will focus on micro-robots, called Magnetozoons, composed of a
magnetic head and an elastic tail immersed into a laminar fluid
possibly non-Newtonian. These robots imitate the propulsion of
spermatozoa by propagating a wave along their tail.
Their movement is controlled by an external magnetic field that
produces a torque on the head of the robot, producing a deformation of
the tail. The tail then pushes the surrounding fluid and the robot
moves forward.
The advantage of such a deformable swimmer is its aptness to carry out
a large set of swimming strategies, which could be selected according
to the geometry or the rheology of the biological media where the
swimmer evolves (blood, eye retina, or other body tissues).
Although the control of a such micro-robots has mostly focused on
simple unconfined environnement, the main challenge is today to design
external magnetic fields that allow them to navigate efficiently in
complex realistic environments.
NEMO aims to elaborate efficient controls, which will be designed by
tuning the external magnetic field, through a combination of Bayesian
optimization and accurate simulations of the swimmer's dynamics with
Newtonian or non-Newtonian fluids. Then, the resulting magnetic fields
will be validated experimentally in a range of confined environments.
In such an intricate situation, where the surrounding fluids is bounded
laminar and possibly non-Newtonian, optimization of a strongly
nonlinear, and possibly chaotic, high-dimensional dynamical system will
lead to new paradigms.
The results of NEMO will be the subject of several publications in
mathematical modeling, numerical analysis, optimization, control,
physics and multidisciplinary journals.
The numerical developments will be provided as open-source softwares.
The experiments will contribute as a proof of concept validating the NEMO control approach.

 Home
Home