
Christopher Mei
PhD Student
Central Catadioptric Systems
And
SLAM
And
SLAM
|
|
Christopher Mei
PhD Student
|
Central Catadioptric Systems
And SLAM |
|
|
I am now a research assistant at the University of Oxford, my new wepage is http://www.robots.ox.ac.uk/~cmei/, you should be redirected in 3 seconds. I enjoy seeing other people's work through video sequences. So I decided to illustrate some of my own work. CalibrationVisual estimation of the quality of the calibation between a omnidirectional camera and a laser range finder (see Publications for more detail)
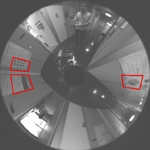
TrackingPlane tracking for generic central cameras (with motion estimation) :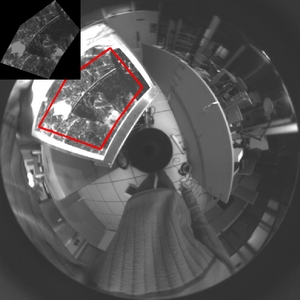

Line tracking for generic central cameras (with motion estimation) : 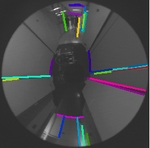
|