| Prev | Part II. Guided Tour and Tutorial Chapter 9. The nbody example |  | Next |
| Prev | Part II. Guided Tour and Tutorial Chapter 9. The nbody example | | Next |
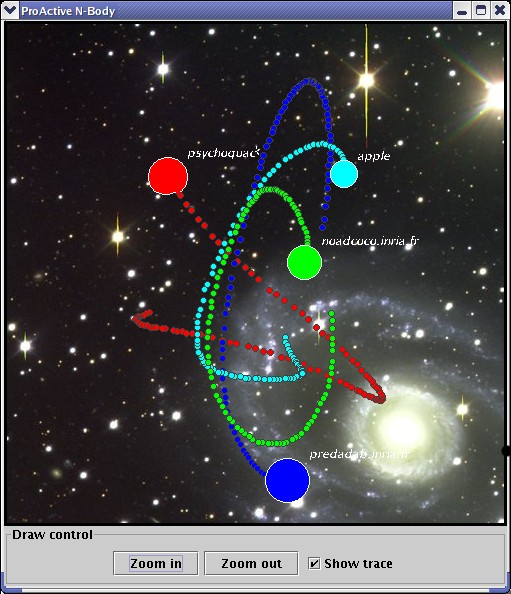
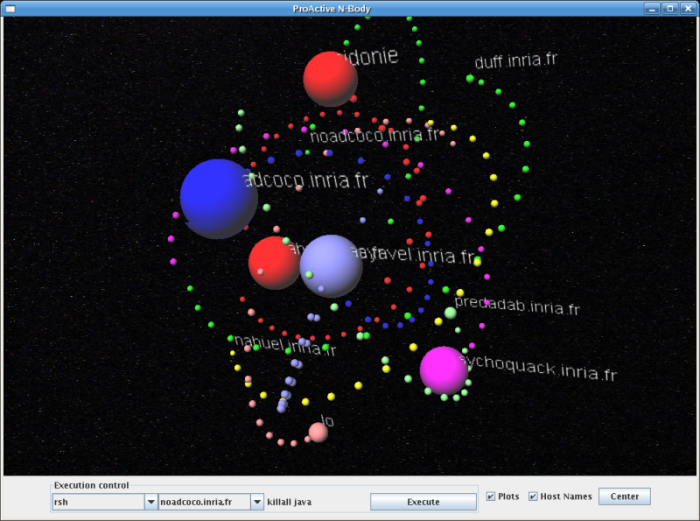
This section of the guided tour goes through the different steps that you would take in writing an application with ProActive, from a simple design, to a more complicated structure. This is meant to help you get familiar with the Group facilities offered by ProActive. Please take note that this page tries to take you through the progression, step by step. You may find some more information, mainly on the design, on the web page of the applications/examples of ProActive. This is a snapshot of the ProActive nbody example running on 3 hosts with 8 bodies:
n-body is a classic problem. It consists in working out the position of bodies in space, which depend only on the gravitational forces that apply to them. A good introduction to the problem is given here. You may find a detailled explanation of the underlying mathematics here. Different ways of finding numerical solutions are given here.
In short, one considers several bodies (sometimes called particles) in space, where the only force is due to gravity. When only two bodies are at hand, this is expressed as
 |
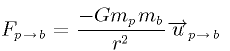
 This should be read as: the total force on the body b is the sum of all the forces applied to b, generated by all the other bodies in the system. This is the force that has to be computed for every body in the system. With this force, using the usual physics formulae, (Newton's second Law)
 one may now compute the movement of a particle for a given time step (a the acceleration, v the velocity, x the position, t the time):
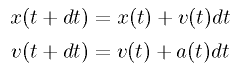 |
With script located in the folder
ProActive/script/[unix|windows] do:
$ nbody.[bat|sh] [-nodisplay | -displayft | -3d | -3dft] totalNbBodies maxIter
No parameter starting in default mode (2D).
-nodisplay starting in console mode.
-displayft starting with fault-tolerance configuration.
-3d starting GUI in 3D, must have Java3d (≥ 1.4) installed and also must have ProActive compiled with it installed.
-3dft same as above with fault-tolerance configuration.
totalNbBodies is the total number of bodies, default is 4 bodies.
maxIter is the maximun number of iterations, default is 10,000 iterations.
Right after starting the application, users have to choose one algorithm for computing. The choice is between:
Simplest version, one-to-one communication and master.
Group communication and master.
Group communication, odd-even-synchronization.
Group communication, oospmd synchronization.
Barnes-Hut.
Mouse controls with the 3D GUI:
Left click: rotating.
Right click: moving the scene.
Scroll whell: zoom in/out
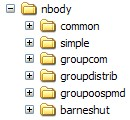
This guided tour is based on the files you may find in the directory ProActive/src/org/objectweb/proactive/examples/nbody. You'll find the following tree:
The common directory contains files reused through the different versions. 'simple' is the simplest example, 'groupcom' is the first example with Group communication, and 'groupdistrib' and 'groupoospmd' are two enhancements based on different synchronization schemes. 'barneshut' is a bit special, in that it contains a different algorithm to solve the nbody problem.
The files contained in 'common' are those that are reused throughout the different versions. Let's see what they do:
First of all there are the two files called Displayer.java and NBodyFrame.java. These handle the graphical output of the bodies, as they move about in space. They are not particularly of interest, as the GUI is not the point of this tutorial. Nonetheless, please note that the important method here is:
public void drawBody(int x, int y, int vx, int vy,
int weight, int d, int id) ;
Taking position, velocity, diameter and a unique identifier of the body, it updates the display window.
Then, we have the files Force.java and Planet.java. They are used to compute the interaction between two distant bodies in the universe. Since they are in the common directory, they can be modified to include other forces (for example, collision) in a simple manner, which would be spread to all the examples. A Planet is no more than a point in space, with velocity and mass - the diameter expresses the size to use for the display:
public class Planet implements Serializable{
public double mass;
public double x,y,vx,vy;
// position and velocity
public double diameter;
// diameter of the body, used by the Displayer
...
Please take note that it implements Serializable because it will be sent as parameter to method calls on Active Objects, but it is good practice to have all your ProActive classes implement Serializable. For example, migration requires everything to implement it, and the same with fault-tolerance....
The Force class is just the implementation of what a physical force really is. It is the implementation of a 3D vector, with the method "add" following the physics rules.
Point3D.java and Cube.java are helper files. They simply implement what a point in space looks like, and what a region of space is. Of course, they were created as being Serializable.
And finally, the Start.java acts as the wrapper for the main() method. There is a part which reads command line parameters, counting bodies and iterations, and constructing the optional Displayer. Before choosing which example to run, it creates the nodes required by the simulation:
// Construct deployment-related variables: pad & nodes descriptorPad = null; VirtualNode vnode; try { descriptorPad = ProActive.getProactiveDescriptor(xmlFileName); } catch (ProActiveException e) { abort(e); } descriptorPad.activateMappings(); vnode = descriptorPad.getVirtualNode('Workers'); Node[] nodes = null; try { nodes = vnode.getNodes(); } catch (NodeException e) { abort(e); }
The Node [] nodes are the different JVMs
that were created on possibly different machines. They are used for
Active Object creation. They were specified in the descriptor used
to deploy the application. You may find more information on these in
Chapter 21, XML Deployment Descriptors, while Active Object creation is
explained in Chapter 13, Active Objects: creation and advanced concepts. Just as an
example, in the simple package, the Maestro is created on the first
of these JVMs, and takes three parameters, a Domain
[], an Integer, and a
Start (it will be detailed later):
Object [] constructorParams ; constructorParams = {domainArray, new Integer(maxIter), killsupport} ; maestro = (Maestro) ProActive.newActive ( Maestro.class.getName(), constructorParams , nodes[0] ) ;
The files contained in the other directories, 'simple', 'groupcom', 'groupdistrib' , 'groupoospmd' detail steps of increasing complexity, making the application use different concepts. 'barneshut' contains the final implementation, featuring the Barnes-Hut algorithm. But let's not go too fast. Let's have a look at the insides of the simplest implementation of the n-body problem.
This is the implementation of the simplest example of nbody. We
defined the Planet to be a passive object, and it
does nothing. It is a container for position, velocity and mass, as
we've seen in the description given higher up. The real actors are the
Domains, they do all the work. Every
Planet in the universe is associated with a
Domain, which is an Active Object.
This Domain contains the code to manage the
communication of the possitions of the Planets during
the simulation. They are created in the Start.java file:
Rectangle universe = new Rectangle (-100,-100,100,100); Domain [] domainArray = new Domain [totalNbBodies]; for (int i = 0 ; i < totalNbBodies ; i++) { Object [] constructorParams = new Object [] { new Integer(i), new Planet (universe) }; try { // Create all the Domains used in the simulation domainArray[i] = (Domain) ProActive.newActive( Domain.class.getName(), constructorParams, nodes[(i+1) % nodes.length] ); } catch (ActiveObjectCreationException e) { killsupport.abort(e); } catch (NodeException e) { killsupport.abort(e); } }
See how the call to ProActive.newActive creates
one new Active Object, a Domain,
at each iteration of the loop. The array nodes
contains all the nodes on which an Active Object may be deployed; at
each iteration, one given node, ie one JVM, is selected. The
constructorParams are the parameters that are to be
passed to the constructor of Domain, and since it's
an Object [] , the parameters may only be
Objects (don't try to build constructors using ints
in their constructor - this explains the use of the class
Integer).
The Domains, once created, are initialized, and
then they synchronize themselves by all pinging the maestro, with the
notifyFinished call:
// init workers, from the Start class for (int i=0 ; i < totalNbBodies ; i ++) domainArray[i].init(domainArray, displayer, maestro); // init method, defined within each worker
public void init(Domain [] domainArray, Displayer dp, Maestro master) { this.neighbours = domainArray; ..... maestro.notifyFinished(); // say we're ready to start }
public void notifyFinished() {
this.nbFinished ++;
if (this.nbFinished == this.domainArray.length) {
this.iter ++;
if (this.iter==this.maxIter)
this.killsupport.quit();
this.nbFinished = 0 ;
for (int i= 0 ; i < domainArray.length ; i++)
this.domainArray[i].sendValueToNeighbours();
}
}
Notice how domainArray is passed to all the
Domains, when calling init. This
is the value assigned to the local field neighbours,
which later on serves to communicate with all the other
Domains of the simulation.
The synchronization is done by the Maestro,
which counts the number of Domains that have
finished, and then asks them to go on to the next iteration. While in
their execution, the Domains gather information
concerning the position of all the other bodies, which need to be known
to move the local Planet, at every time step. This is
done using a push scheme. Instead of explicitly asking for information,
this information is automatically issued:
public void sendValueToNeighbours() { for (int i = 0 ; i < this.neighbours.length ; i ++) if (i != this.identification) // don't notify self! this.neighbours[i].setValue(this.info, this.identification); ..... } public void setValue(Planet inf, int id) { this.values [id] = inf; this.nbReceived ++ ; if (this.nbReceived > this.nbvalues) // This is a bad sign! System.err.println('Domain ' + identification + ' received too many answers'); if (this.nbReceived == this.nbvalues) { this.maestro.notifyFinished(); moveBody(); } }
This means that each Domain sends its
information to all the other Domains, and then waits
until it has received all the positions it is waiting for. The other
Domains are stored as an array, which is called
neighbours. You may find another view of this example
on this web
page.
This is a simple improvement, which results in faster
communication. You may have noticed the Group capabilities of ProActive.
They give us the ability to call an operation on an object which is a
Group, and have it sent to all the members of the Group. We can use them
in this framework: first, create a Group (instead of having independant
Active Objects) :
// in the Start class Object [][] params = ... Domain domainGroup = null; try { // Create all the Domains as part of a Group domainGroup = (Domain) ProActiveGroup.newGroup ( Domain.class.getName(), params, nodes); } catch ....>
The double array params stores the parameters passed to the
constructors of the Domains we're creating.
Domain 0 will have params[0][]
passed as arguments, Domain 1 params[1][], and so on.
The nodes are the Nodes on which to create these Active Objects. Do
notice the try... catch construction which is needed
around any creation of Active Objects because it may
raise exceptions. In this previous bit of code, a
Group containing new Active
Objects has been created and all these Objects belong to the
group . You may have noticed that the type of the
Group is Domain. It's a bit strange at first, and you
may think this reference points to only one Active Object at once, but
that's not true. We're accesssing all the objects in the group, and to
be able to continue using the methods of the Domain class, the group is
typed as Domain, and
that's the reason why it's called a typed
Group.
Then this group is passed as a parameter to all the members of the Group in just one call:
// Still in the Start class
domainGroup.init(domainGroup, displayer, maestro);
This method sets the local field as a copy of the passed
parameter, and as such is unique. We can play around with it without
affecting the others. So let's remove the local
Domain from the Group, to avoid having calls on
self:
public void init(Domain domainGroup, Displayer dp, Maestro master) { this.neighbours = domainGroup; Group g = ProActiveGroup.getGroup(neighbours); g.remove(ProActive.getStubOnThis()); // no need to send information to self .....
Remember that in the previous example, the neighbours where stored in an array, and each was accessed in turn:
for (int i = 0 ; i < this.neighbours.length ; i ++) if (i != this.identification) // don't notify self! this.neighbours[i].setValue(this.info, this.identification);
Well, that's BAAAAD, or at least inefficient! Replace this by the following code, because it works faster:
this.neighbours.setValue(this.info,
this.identification);
This has the following meaning: call the method setValue, with the
given parameters, on all the members of the Group
neighbours. In one line of code, the method
setValue is called on all the Active Objects in the
group.
You may find another view of this example on this web page.
Now, do we like the idea that the synchronization is centralized
on one entity, the Maestro? I don't and it's the
bottleneck of the application anyway: once a Domain
has finished, it sends the notifyFinshed, and then sits idle. A way of
making this better is to remove this bottleneck completely! This is done
by using an odd-even scheme: if a Domain receives information from a
distant Domain too early (ie in the wrong iteration),
this information is stored, and will get used at the next iteration. In
the meantime, the local Domain does not change its iteration, because it
is still waiting for more results, in the current iteration.
public void setValue(Planet inf, int receivedIter) { if (this.iter == receivedIter) { this.currentForce.add(info, inf); this.nbReceived ++ ; if (this.nbReceived == this.nbvalues) moveBody(); } else { this.prematureValues.add(new Carrier (inf, receivedIter)); } }
Also notice how the computation is done incrementally when the
result is received (this.currentForce.add(info,
inf);), instead of when all the results have arrived. This
allows for less time spent idle. Indeed, waiting for all the results
before computing might leave idle time between setValue requests. And
then, just before computing the new position of the body, the sum of all
the forces has to be computed. It's better to have this sum ready when
needed.
The prematureValues Vector is the place where
we put the values that arrive out of sync. When a value is early, it is
queued there, and dequeued as soon as this Domain
changes iteration.
public void sendValueToNeighbours() { reset(); this.iter++; if (this.iter < this.maxIter) { neighbours.setValue(this.info, this.iter); ... // display related code treatPremature(); } ... // JVM destruction related code }
The treatPremature() method simply treats the values that were early as if they had just arrived, by calling the setValue method with the parameters stored.
You may find another view of this example on this web page.
This is another way to improve the groupcom example. It also removes the master, but this time by inserting oospmd barriers, that can be thought as behaving like the maestro class, but faster. To create functional OOspmd Groups, there is a special instruction, which takes the same parameters as a newGroup instruction:
Object [][] params = ... Domain domainGroup = null; try { domainGroup = (Domain) ProSPMD.newSPMDGroup( Domain.class.getName(), params, nodes); } catch ...
Now, to use this OOspmd group properly, we want to use the barrier() methods. We put these in the Domains code, to do the synchronization. What happens is that each Domain hits the barrier call, and then waits for all the others to have reached it, before reading its request queue again.
public void sendValueToNeighbours() { this.neighbours.setValue(this.info, this.identification); ProSPMD.barrier('barrier' + this.iter); this.iter++; this.asyncRefToSelf.moveBody(); ....
Beware, the stop-and-wait is not just after the barrier call, but
instead blocks the request queue. So if there is code after that
barrier, it will get executed. In fact, the barrier should be seen as a
prioritary request on the queue. This explains why we had to put the
code after the barrier as a method placed on an asynchronous refernce to
self. If we hadn't done it that way, but just appended the code of that
method just after the barrier, the call to moveBody()
would be executed before the barrier execution, which is exactly what we
don't want!
You may find another view of this example on this web page.
This way to construct the nbody simulation is based on a very different algorithm. This is inserted to show how one can express this algorithm in ProActive, but breaks off from the previous track, having such a different approach to solving the problem. Here's how it works:
To avoid broadcasting to every active object the new position of every particle, a tree implementation can simplify the problem by agglomerating sets of particles as a single particle, with a mass equal to the sum of masses of the all the particles:. This is the core of the Barnes-Hut algorithm. References on this can be found for example here, and here. This method allows us to have a complexity brought down to O(N log N).
In our parallel implementation, we have defined an Active
Object called Domain, which represents a
volume in space, and which contains Planets. It is
either subdivided into smaller Domains, or is a leaf
of the total tree, and then only contains Planets. A
Planet is still an Object with mass, velocity and position, but is no
longer on a one-to-one connection with a Domain. We
have cut down communications to the biggest Domains
possible : when a Planet is distant enough, its
interactions are not computed, but it is grouped with its local
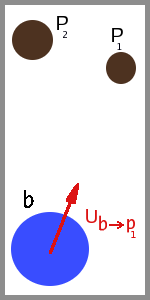
neighbours to a bigger particle. Here is an example of the
Domains which would be known by the
Domain drawn in red:
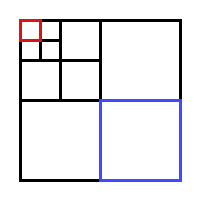 |
 |
The Domain in the lower left hand-corner, drawn in blue, is also divided into sub-Domains, but this needs not be known by the Domain in red: it assumes all the particles in the blue Domain are only one big one, centered at the center of mass of all the particles within the blue.
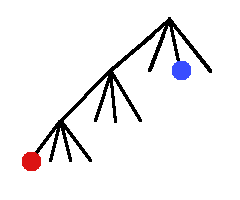
In this version, the Domains communicate with a
reduced set of other Domains, spanning on volumes of
different sizes. Synchronization is achieved by sending explicitely
iteration numbers, and returning when needed older positions. You may
notice that some Domains seem desynchronized with
other ones, having several iterations inbetween. That is no problem
because if they then need to be synchronized and send each other
information, a mechanism saving the older positions permits to send them
when needed.
You may find another view of this example on this web page.
In this guided tour, we tried to show different facilities provided by ProActive, based on a real problem (nbody). We first saw how to deploy the application, then tuned it by adding Group communication, then removed a bottleneck ( due to the hard synchronization ) . Finally, given is the code associated to a different algorithm, which cumbersomely shows how to get Active Objects deployed along a tree structure to communicate. Remember that there is another explanation of all this on the web.
© 2001-2007 INRIA Sophia Antipolis All Rights Reserved