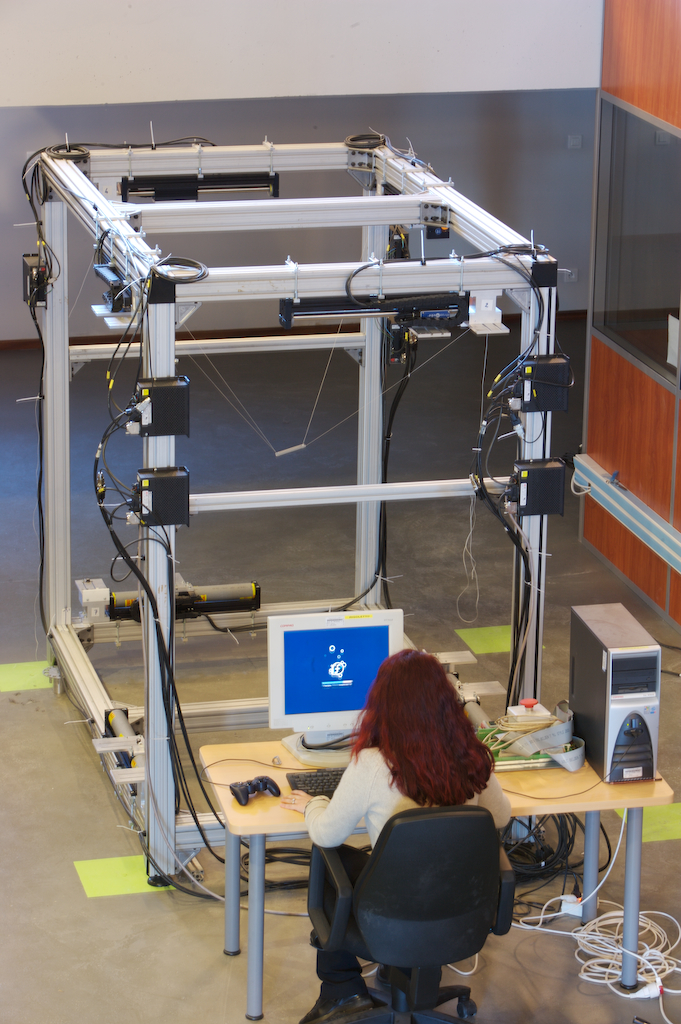
A cable-driven parallel robot (CDPR) is a special case of parallel robots where the robot’s legs are replaced by cables that can be coiled or uncoiled using winches. The interests of this type of robot are on the one hand the simplicity of their mechanical construction and the fact that they make it possible to build lightweight robots but of very large size and that can handle very large loads, well beyond what is possible with usual robots (see figure 1 and the HEPHAISTOS gallery).
The HEPHAISTOS team is considered as a world leader in the field of CDPR both for the development of their analysis and for the practical design of CDPRs.
The control of this type of robot currently rests essentially on a measurement of the length of the cables estimated from the rotation of the winches drum. Unfortunately this measure is very imperfect because of variations in the winding of the cables that changes the radius of the drum and therefore the amount of cable that is coiled for a given rotation of the drum. Moreover, as soon as one reaches an important robot size one cannot neglect the deformations of the cables under their own weight. It is possible to take into account these distortions with realistic models (e.g. the Irvine model), which involves the the geometry of the robot and the tensions in the cables, lead to complex relationships between the positioning of the robot and the lengths of cables whose resolution (for example for determining the possible positions of the robot being given estimates of the cable lengths) is done in a computation time that is not compatible with a real-time system and provides the set of all possible solutions whereas only that corresponding to the current position has an interest for the control (see [2], [4]).
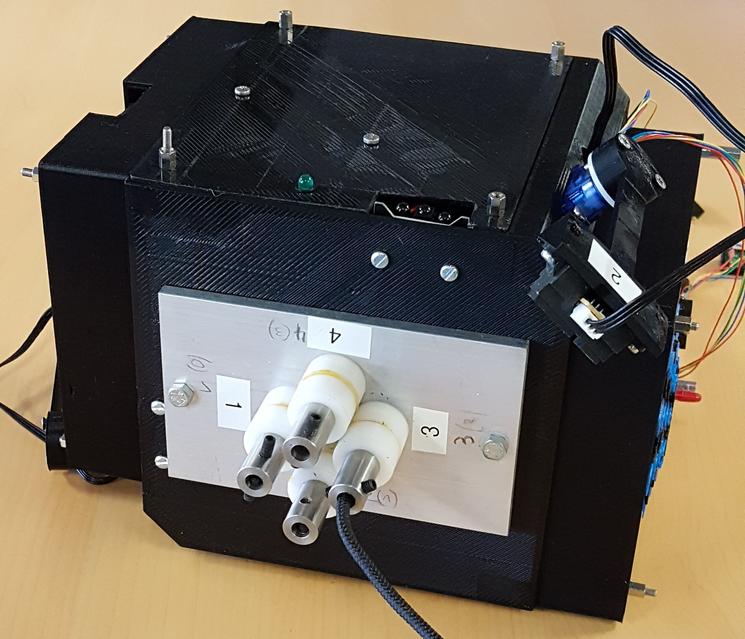
Another approach is to add information about the system by measuring other quantities than the cable lengths such as, for example, the orientation of the robot by an accelerometer or the orientation of the cables by an optical device) with the objective of constructing an over-constrained equations system that will have only one solution and to merge the information, necessarily imprinted with uncertainties since measured, to obtain a better estimation of the state of the system represented by a vector of relatively large size (typically at minimum of 6 but up to 50). Our first work in this area has identified possible measures [3],[1]. We have shown that measuring the cable tensions (that will be quite helpful) is very difficult and noisy. We have also considered accelerometer for measuring partly the orientation of the platform or the cable orientation but also optical sensors for measuring (partly or completely) the cable orientation and are considering using LIDAR information. We have then build two versions of an instrumented platform with strain gages, accelerometer and optical sensors(figure 2).
The first part of this thesis will be to theoretically examine further the possible combinations of measurements that could lead to the determination of the current state vector of the system.
Then it will necessary to evaluate the influence of measurement uncertainties on the determination of the state vector when the robot is evolving a bounded region of its 6-dimensional operational space. The difficulty of this evaluation is that it cannot be based only on statistics since such a system can have applications where security is critical. It is necessary to proceed with a rigorous analysis to determine in a guaranteed way certain essential characteristics such as the maximum tension in the cables. This analysis is difficult because of the non-algebraic nature of the models, which disqualifies some exact numerical methods, and because of the size of the state vector. But this complexity is reinforced by a curiosity of this type of robot that admits several possible state functions: the function that is valid at a given time will depend on the history of the system, which imposes, for example, to take into account the discrete time nature of its control for being able to predict the future states of the system. Moreover, if this prediction is possible, its computation can require at certain time a computational accuracy which exceeds largely the one available on our computers and thus impose to use extended arithmetic [5]. A tool of choice for this work is interval analysis that is mastered by the HEPHAISTOS team: a formation to this mathematical tool will be provided by the team.
The second part of this thesis will consist in the experimental verification of the theoretical results. The HEPHAISTOS team has the hardware for providing the ground truth regarding, for example, the absolute positioning of the CDPR and has also numerous prototypes of varying complexity. Especially the mobility assistance robot MARIONET-ASSIST for frail people will be more particularly appropriate because potentially of significant societal impact while being critical in term of safety since the task of this robot is to help frail people to move or even to fully lift them.
Location: this PhD will be hosted by the HEPHAISTOS team in Sophia-Antipolis, 20 km from Nice. The sea shore is 4 km away from Sophia while going to mountains and ski resorts require between half an hour and 2 hours. The lab has a large experimental space with plenty of available hardware and a cafeteria for lunches. The INRIA center at Sophia hosts about 500 researchers and PhD students in 33 teams working in various fields of computer science and applied mathematics.
Pre-requisites:
This document was translated from LATEX by HEVEA.