Le robot plan de Daniali. En commandant les
longueurs

,

,

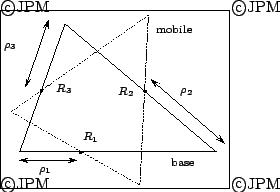
on peut ajuster la position du
triangle mobile par rapport au triangle de base, d'après
Daniali [
32].
The planar robot of Daniali. The mobile triangle can move
with respect to the base triangle by changing the leg lenghts

,

,

.
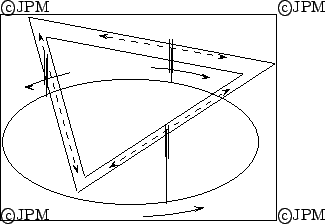
Une variation du robot de Daniali, d'après
Brodsky [
17].
A variation of Daniali's robot