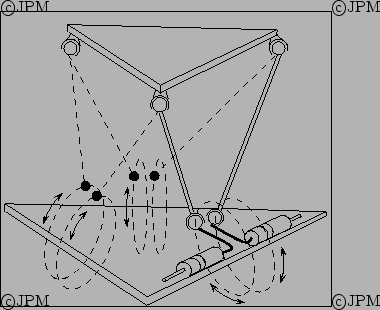
Le robot utilisant des
chaînes de type

proposé par Hunt en 1983, d'après Hunt [
75].
A manipulator using

kinematic chains
proposed by Hunt in 1983.
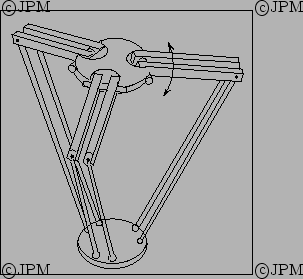
Le robot "Hexa" de Pierrot, de type 6-RUS, une
généralisation
du concept du "Delta", d'après Pierrot [
139].
The "Hexa" robot of Pierrot, a 6-RUS mechanism, a generalisation of the "Delta" robot
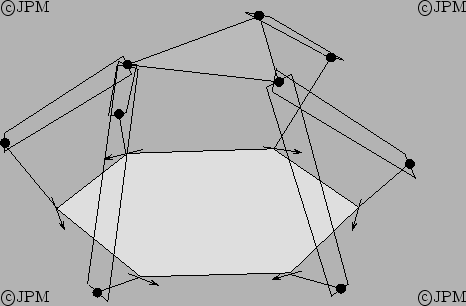
Une variante du robot HEXA, le 321-HEXA, proposé par Bruyninckx
[
19]. Sa particularité est que l'on peut
calculer analytiquement les solutions de son modèle géométrique
direct.
A variant of the HEXA robot, the 321-HEXA.
presented by Bruyninckx.
Its main feature is that its forward kinematics have
closed-form solutions.