Participants: Francois Bremond, Binh Bui,Monique Thonnat.
We have presented a real-time system for shape recognition.
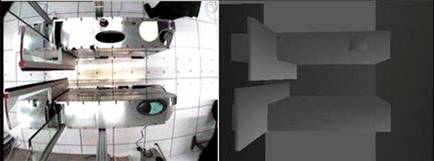
This system is a video and multi-sensor platform with a fixed camera
observing the mobile objects from the top and lateral sensors
observing the side of mobile objects. This system is able to classify
the mobile objects evolving in the scene into several expected
categories. The key of the recognition method is to compute mobile
object properties (i.e. width, height, density of
occluded/non-occluded sensors) by making use of the top camera and
lateral sensors and then to apply Bayesian classifiers to these
properties. A learning phase based on ground truth data is used to
train the Bayesian classifiers. Our recognition method has been
integrated into an existing access control device used in public
transportation (subway) at RATP to improve safety and comfort, to
prevent fraud and to count people for statistical matters. The
expected categories in this case are mainly "adult", "child", and "baggage" (i.e. suitcases, bag, and backpack).
Figure 1.
A platform combining video and a multi-sensor system (leds, optical cells). |
We have also studied a degraded operating mode of the system,
i.e., we do not use the top camera for categorizing mobile objects.
We have also tested other classification methods with our actual
database. Our goal is, on one hand, to compare the performance of both
systems (with and without the top camera) and, on the other hand, to
make a comparison between our classification method and other methods
such as those based on support vector machines (SVM) and neural
networks (NN).