|
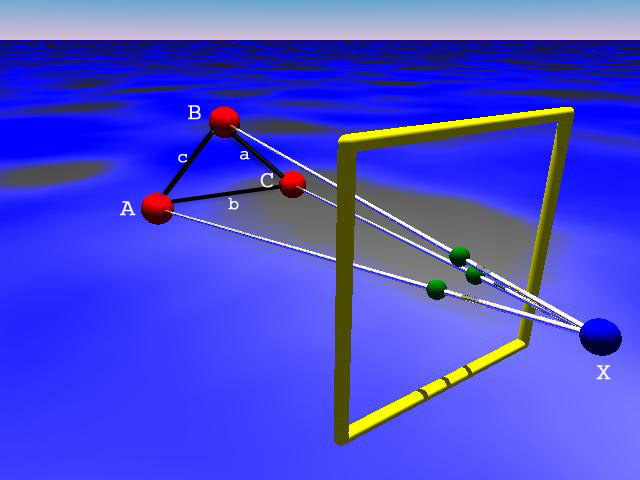
On cherche les solutions du problème de positionnement d'une
caméra (calibrée) à partir de l'image de 3 points
 connus dans
connus dans  .
.
Calculer les équations sur les distances entre le centre de la caméra et les trois points en fonction des angles de vue et des distances entres les points.
(ideal)
Déterminer une base du quotient par l'idéal engendré par ces équations.
(monomialIdeal)
Calculer la matrice de multiplication dans cette base.
(%, matrix, submatrix, |, coefficients)
Calculer les vecteurs propres de sa transposée.
(sub(.,RR), eigenvectors)
En déduire les solutions du problème.
(columnMult)
i1 :
R = QQ[x1,x2,x3]
Une fonction qui calcule l'idéal à partir des
cosinus  des angles entre les rayons de
visés des points
des angles entre les rayons de
visés des points  et des distances
entre ces points.
et des distances
entre ces points.
i2 :
F = (c1,c2,c3,d1,d2,d3) ->
ideal( {x1^2+x2^2-2*c1*x1*x2-d1,
x1^2+x3^2-2*c2*x1*x3-d2,
x2^2+x3^2-2*c3*x2*x3-d3 })
i3 :
I = F(1/2,1/10,1/3,1,2-1/5,2-2/3)

Le degré ou le nombre de solutions (comptées avec multiplicité).
i4 :
degree I
i5 :
monomialIdeal (I)

Une base monomiale du quotient  .
.
i6 :
B = {1,x1,x2,x3,x1*x3,x2*x3,x3^2,x3^3}

i7 :
(Mn,C) = coefficients((x1^2 % I), Monomials=>B);C
La matrice de multiplication par  dans
cette base. On multiplie chaque élément de
dans
cette base. On multiplie chaque élément de  par et on calcule son reste
modulo (la base de Grobner de)
par et on calcule son reste
modulo (la base de Grobner de)  .
.
i9 :
M = matrix(QQ,{{0},{0},{0},{0},{0},{0},{0},{0}});
for m in B do {
(Mn,C) = coefficients((m*x1 % I), Monomials=>B);
M = M|C;
};
M=submatrix(M,{1..8})
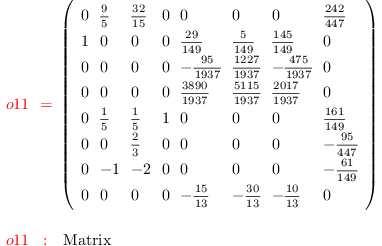
La matrice (tranposée) de la multiplication par dans le dual de .
i12 :
M1 = sub(transpose(M),RR)
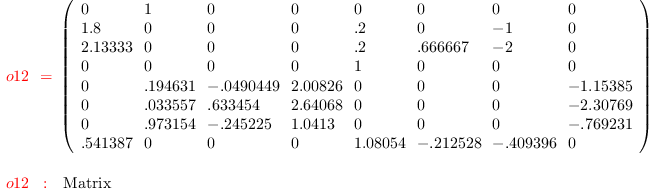
Ses valeurs et vecteurs propres.
i13 :
(V,E) = eigenvectors (M1)
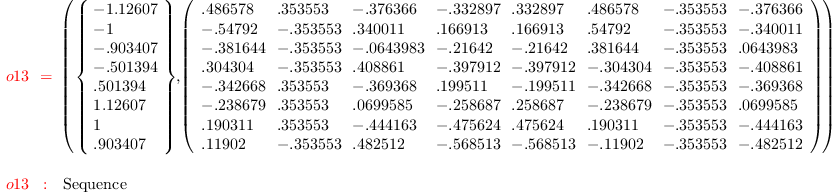
On normalise en divisant par un scalaire pour avoir  en première ligne.
en première ligne.
i14 :
S = mutableMatrix(E);
for i from 0 to numcols(E)-1 do {
columnMult(S,i,1/E_(0,i))
};
Ev = matrix(S)
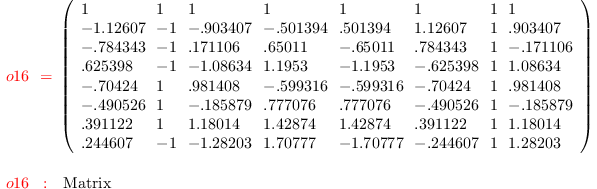
On lit les coordonnées des solutions dans les 3 lignes
suivantes, car 
i17 :
transpose(submatrix(transpose(Ev),{1..3}))

i18 :
Les variables  représentant des distances,
seules les solutions réelles positives nous intéressent.
Dans cet exemple, il n'y a que la solution
représentant des distances,
seules les solutions réelles positives nous intéressent.
Dans cet exemple, il n'y a que la solution  . A
partir de ces distances aux points , nous
calculons la position du centre de la caméra. Il y a deux
possibilités (devant ou derrière le plan
. A
partir de ces distances aux points , nous
calculons la position du centre de la caméra. Il y a deux
possibilités (devant ou derrière le plan  )
correspondant à deux positions « mirroirs ».
L'orientation des images de dans le plan de
l'image permet alors de déterminer quelle est la bonne position.
)
correspondant à deux positions « mirroirs ».
L'orientation des images de dans le plan de
l'image permet alors de déterminer quelle est la bonne position.