Abstract:
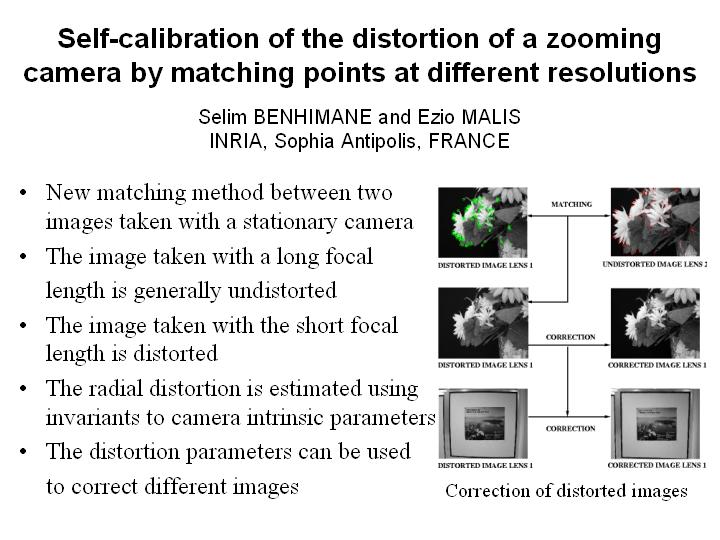
This paper presents a new method for the self-calibration of the
lens distortion of a zooming camera which appears for short focal
lengths. The proposed technique does not need any special
calibration pattern nor any prior knowledge about the
environment.
The key idea is to match points between a distorted image and an
undistorted image taken at different resolutions. A new method
for
automatically matching points in the two images is proposed. The
scale factor between the images is not needed for the matching
algorithm. Matched points are used to compute invariants to the
pinhole camera parameters. Then, lens distortion
parameters are
estimated in order to obtain the same invariants in both images.
This approach is well suited to autonomous robotic vision
applications. In fact, the self-calibration of the camera
is done
before moving the robot. Experiment with ground truth and
tests on
real images provide good results |