Next: 24.2 Problème de CAO
Up: 24 Quelques exemples
Previous: 24 Quelques exemples
Next: 24.2 Problème de CAO
Up: 24 Quelques exemples
Previous: 24 Quelques exemples
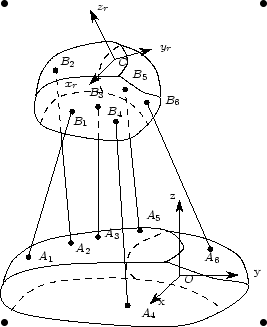
Posture du robot: définie par les coordonnées  de
de
 et 3 angles de rotation
et 3 angles de rotation  ,
,
 ,
, 
Équilibre mécanique du robot:
 : forces/moments exercés sur la plate-forme
: forces/moments exercés sur la plate-forme
 : forces dans les jambes
: forces dans les jambes
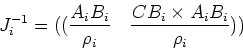
-
 ,
,  :
matrice jacobienne du robot
:
matrice jacobienne du robot
Singularités: si 
Problème:
Déterminer l'absence de singularités pour un robot donné quelque
soit sa posture dans un espace de travail donné
Espace de travail:
-
 (espace cartésien)
(espace cartésien)
-
 tel que
tel que
soit
si  =0
=0

 =0
=0
- les coefficients
 sont constants pour un robot de
géométrie donnée
sont constants pour un robot de
géométrie donnée
- mais ils peuvent être définis par des intervalles de largeur
faible (erreur de fabrication)
- les coefficients
 sont constants
sont constants
- on peut supposer que l'on connaît un point
 dans l'espace de
travail et calculer le signe de
dans l'espace de
travail et calculer le signe de  en ce point (on supposera ici
que
en ce point (on supposera ici
que 
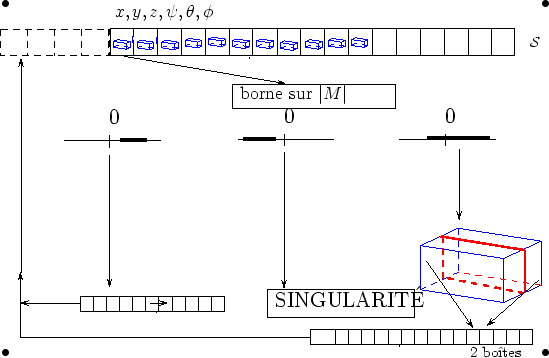
L'important dans le problème est de prouver l'existence ou
l'absence de singularités MAIS pas de localiser une
singularité
- si l'on peut trouver une posture
 où
où  alors il
existe une singularité entre
alors il
existe une singularité entre 
- s'il n'existe pas de posture où , alors il n'y a
pas de singularité dans l'espace de travail
- on peut facilement prendre en compte les contraintes: si
 suppression de la boîte
suppression de la boîte
- on peut gérer les incertitudes du modèle
Next: 24.2 Problème de CAO
Up: 24 Quelques exemples
Previous: 24 Quelques exemples
Jean-Pierre Merlet
2007-05-18