
les prototypes de COPRIN/ prototypes in the COPRIN project

Nos développements matériels se concentrent sur les robots
parallèles (à câbles ou non, dont le principe moteur est illustré dans
cette vidéo), l'assistance aux personnes âgées et
handicapées comme les aides
à la mobilité, que nous testons dans notre appartement
témoin. Nous présentons ici quelques vidéos
mais d'autres sont disponibles sur notre
channel YouTube. Nous considérons que le
développement de prototypes, quoique très chronophage,
est une étape
indispensable dans nos recherches pour valider nos avancées
théoriques et trouver de nouveaux problèmes. Il est
donc nécessaire pour nous de disposer de nos propres
prototypes dont nous maitrisons toutes les couches, qu'elles soient
mécaniques, informatique ou de commande.
Our hardware development focus on parallel robots
(wire-driven or not, whose motion principle is illustrated in this
video), assistance to elderly and handicaped people,
such as walking aids that we test in our simulated flat. We present here some videos but
other are available on our
YouTube channel. We estimate that prototypes development,
although extremely time consuming, is
essential in our research to validate our theoretical advances and
to discover new problems. Hence it is necessary for us to have our
own prototypes of which we master all levels, either mechanical,
computer or control.
Nous avons entamé à partir de 2004 un important
effort de développement de robots parallèles à
câbles où le déplacement de la plate-forme est
obtenu en enroulant/déroulant des câbles tous
attachés
à la plate-forme mobile. Tous ces robots font partie de la
famille
MARIONET, un nom donné par Jérome Chailloux
à nos robots, cette vidéo
expliquant pourquoi...
We started in 2004 an important development effort in the field
of wire-driven parallel robot, in which the motion of the platform
is obtained by coiling/uncoiling wires that are all connected to the
platform. All this robot are part of the MARIONET family,
this video explaining why..
Dans cette famille nous avons, par ordre d'apparition sur
scène/ in this family we have: MARIONET-REHAB, MARIONET-CRANE
MARIONET-ASSIST,
MARIONET-SCHOOL et
MARIONET-VR.
-
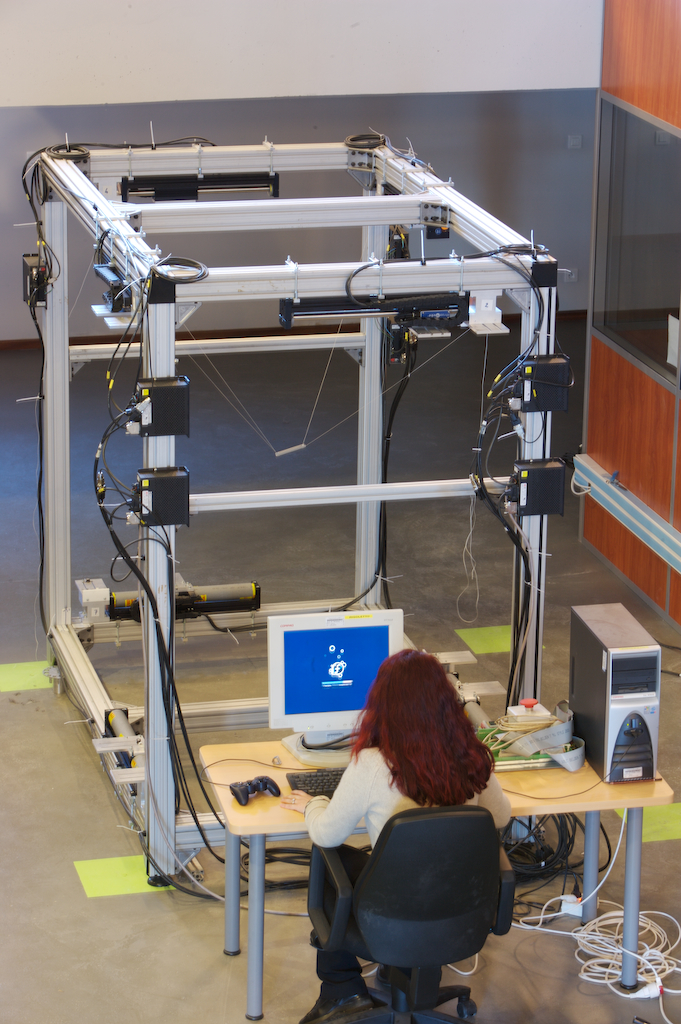 robot parallèle à câbles/ parallel wire-driven robot MARIONET-REHAB,
(2004-) pour la
rééducation et les déplacements
ultra-rapides. Utilise 7 actionneurs linéaires (vitesse
maximum: 10m/s) dont les déplacements sont amplifiés
par un système de poulies. Cette motorisation, qui remplace
le plus classique couple moteur + tambour, permet une plus grande
modularité, une vitesse accrue (théoriquement ce robot
peut dépasser la vitesse du son..mais nous n'avons pas
essayé..)
et une meilleure
précision de positionnement
robot parallèle à câbles/ parallel wire-driven robot MARIONET-REHAB,
(2004-) pour la
rééducation et les déplacements
ultra-rapides. Utilise 7 actionneurs linéaires (vitesse
maximum: 10m/s) dont les déplacements sont amplifiés
par un système de poulies. Cette motorisation, qui remplace
le plus classique couple moteur + tambour, permet une plus grande
modularité, une vitesse accrue (théoriquement ce robot
peut dépasser la vitesse du son..mais nous n'avons pas
essayé..)
et une meilleure
précision de positionnement
a parallel wire-driven robot for rehabilitation and ultra fast motion. Use
7 linear actuators (maximal speed: 10 m/s) whose motion are
amplified by a pulleys system (in place of the more classical
rotary winches), resulting in a better
modularity, increased velocity (theoretically the robot can move at a
speed larger than the speed of sound..but we have never tried
..)
and better positioning accuracy.
Videos:
avi video (basic motion),
mp4 crane motion
(fast motion, 4 wires, used as a crane) ,
mp4 rehabilitation
(patient has to point at an object on the screen).
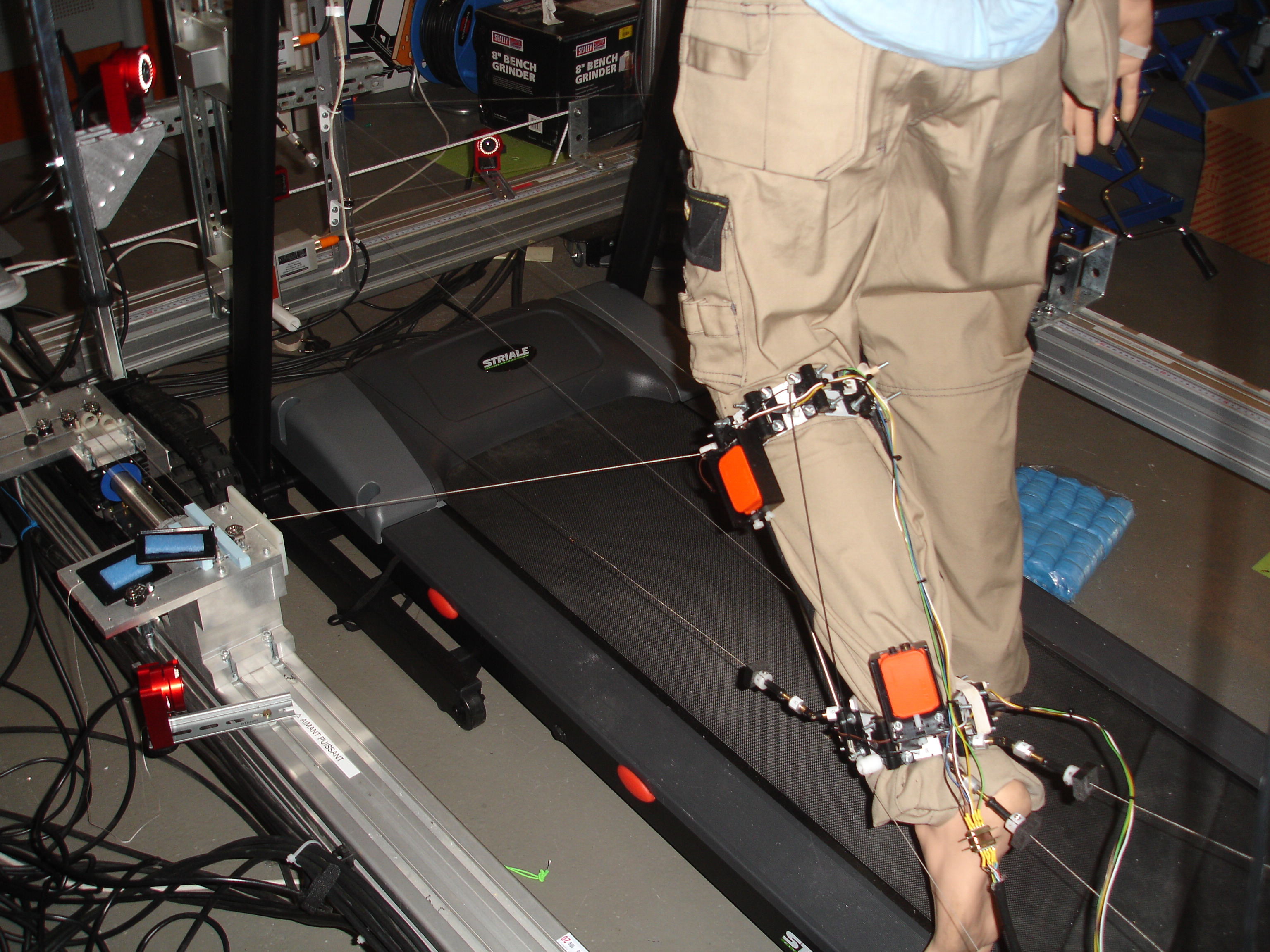
Il est aussi utilisé en biomécanique pour l'identification
de mouvements articulaires, en combinaison avec un système
de motion capture,
des capteurs de pression plantaire, des
accéléromètres, des
capteurs de distance et de forces et une table d'effort. Sur cette photo on peut voir une
expérience de mesure du mouvement du genou.
It is also used for biomechanical experiments for identifying human
joint motion in combination with a motion capture system, foot pressure
sensors, accelerometers, distance and force sensors and force plate.
This
photo shows an experiment for
identifying knee motion.
-
 robot parallèle à c�bles/parallel wire-driven crane
MARIONET-CRANE,
(2008-)
utilisé comme grue de secours, portable à dos d'hommes,
totalement autonome et pouvant soulever plus d'une tonne. Cette grue a
été déployée en extérieur pendant 3 mois dans un
espace de 75x45x30m.
robot parallèle à c�bles/parallel wire-driven crane
MARIONET-CRANE,
(2008-)
utilisé comme grue de secours, portable à dos d'hommes,
totalement autonome et pouvant soulever plus d'une tonne. Cette grue a
été déployée en extérieur pendant 3 mois dans un
espace de 75x45x30m.
A very large wire-driven crane that may be used for example as a portable,
fully autonomous,
rescue crane, with a lifting capacity of over 1 ton. This crane has been
deployed outdoor during 3 months on a workspace of 75x45x30m
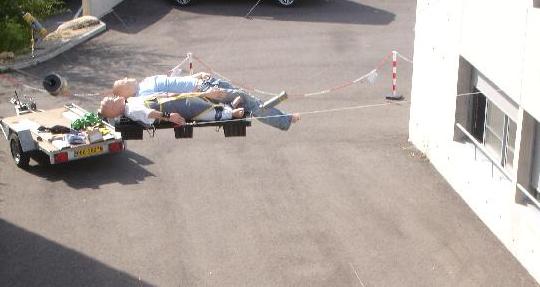
Photos: une vue
panoramique
de l'installation de 5 des 6 treuils/ a panoramic view of the
outdoor installation
of 5 of the 6 winch systems , Charlie sur
son brancard, Charlie on his
stretcher, dégagement de
Charlie et Jennifer après un
accident de la route,
Charlie and Jennifer after a car accident, puis
transférés vers les
secours, then transfered to the
rescuers. Enfin une autre vue globale de
l'installation, another view of our setup
Videos:
- cette video
montre différentes expérimentations réalisées
avec ce robot/This video
shows various experimentation that we have performed with this robot.
- cette video montre que sur une
trajectoire le robot peut passer d'une solution du modèle
géométrique direct avec 6 câbles tendus à une autre,
toujours avec 6 câbles tendus, sans passer par une singularité
this video shows that on a trajectory the robot may move from one solution
of the forward kinematics with 6 wires under tension to another one, still
with 6 wires under tension, withoug crossing a singularity
-
 robot parallèle à câbles/
parallel wire-driven crane,
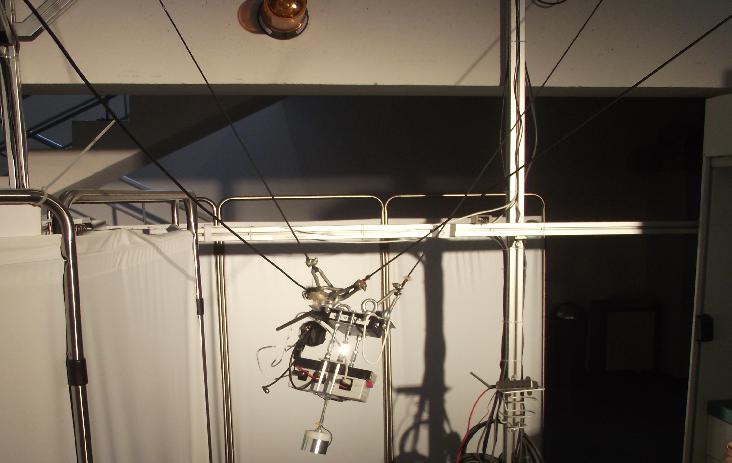
MARIONET-ASSIST,(2011-) pour le transfert des personnes
âgées ou handicapées. Ce robot, très peu
intrusif car caché dans le plafond, peut soulever partiellement
ou intégralement la personne. Il peut servir aussi pour
manipuler des objets comme, par exemple, ramasser des clés
tombées au sol. Le robot est installé dans notre
appartement témoin. Il est très modulaire dans son
installation et son fonctionnement: même s'il dispose de 6
câbles nous l'utilisons actuellement avec seulement 4 dans une
configuration où les câbles sont tous attachés au
même point, ce qui permet de commander trois degrés de
liberté. La plate-forme permet une rotation à 360
degrés autour de l'axe vertical soit passive, soit active. Elle
permet à l'utilisateur de se diriger dans n'importe quelle
direction (les intentions de mouvement pouvant être
détectées par un accéléromètre placé
sur la plate-forme).
robot parallèle à câbles/
parallel wire-driven crane,
MARIONET-ASSIST,(2011-) pour le transfert des personnes
âgées ou handicapées. Ce robot, très peu
intrusif car caché dans le plafond, peut soulever partiellement
ou intégralement la personne. Il peut servir aussi pour
manipuler des objets comme, par exemple, ramasser des clés
tombées au sol. Le robot est installé dans notre
appartement témoin. Il est très modulaire dans son
installation et son fonctionnement: même s'il dispose de 6
câbles nous l'utilisons actuellement avec seulement 4 dans une
configuration où les câbles sont tous attachés au
même point, ce qui permet de commander trois degrés de
liberté. La plate-forme permet une rotation à 360
degrés autour de l'axe vertical soit passive, soit active. Elle
permet à l'utilisateur de se diriger dans n'importe quelle
direction (les intentions de mouvement pouvant être
détectées par un accéléromètre placé
sur la plate-forme).
this crane is primarly used for transfer operation for elderly and
handicaped people. It has a low intrusivity as it is hidden in the
ceiling and may also be used for rehabilitation (e.g. for alleviating
part of the gravity) or manipulation purposes (e.g. retrieving
keys on the ground). It is installed in our test flat. Although the
robot has 6 wires we use it currently only with 4 wires, all connected
at the same point on the platform, hence providing 3 dof. An axis on
the platform allows a 360 degrees rotation around a vertical axis,
either passive or actuated. Hence the end-user may move in any
direction (his/her intention being detected by an accelerometer on the
platform).
Photos:
exemples de transfert avec Charlie
ou Jennifer
examples of transfer
operation with Charlie and Jennifer,
- une vue qui montre que si tous les câbles sont attachés au
même point, alors
même si on a 4 câbles seulement 3 au plus
sont tendus
simultanément quelle que soit la commande, a view that shows
that although if all wires are attached at the same point, then even
if we have 4 wires (or more) only at most 3 are under tension
whatever the control is ,
-
des photos montrant que pour un robot a 4 câbles, tous attachés
en des points différents on peut avoir en tension
4 câbles , ou seulement
3 câbles , voire seulement
2 câbles .
photos that show that for a 4 wires robots, all being attached at different
points on the platform we may have 4 wires under tension but also only 3 or 2
- le robot soulevant le
déambulateur ANG, the
robot lifting the walking aid ANG,
- des couverts sur une
table vue par la webcam embarquée
sur la plate-forme du robot: un asservissement visuel va en permettre
la saisie, forks and knives as seen from the onboard webcam of the
robot: a visual servoing algorithm will allow to grasp them
Video: des opérations de
transfert avec Charlie et Jennifer, transfer operation on
Jennifer and Charlie .
 (2012-)
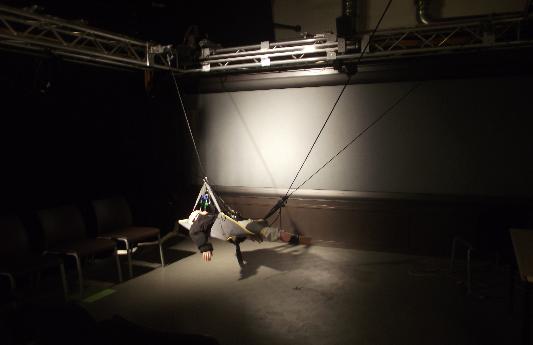
robot parallèle à câbles/
parallel wire-driven crane,
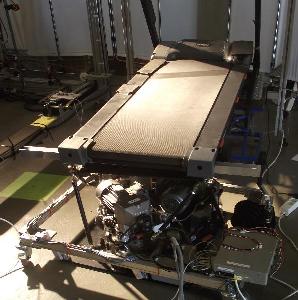
MARIONET-VR,: ce robot est installé dans la salle immersive
de Sophia. Il utilise 6 actionneurs linéaires et peut soulever
une personne. Il sera utilisé pour de la
rééducation et de la simulation mais aussi pour
permettre un retour haptique. Il pourra être utilisé en
conjonction avec notre motion base
et différents supports comme
un tapis de marche, eux-mêmes pouvant
être instrumentés et actionnés. (2012-)
robot parallèle à câbles/
parallel wire-driven crane,
MARIONET-VR,: ce robot est installé dans la salle immersive
de Sophia. Il utilise 6 actionneurs linéaires et peut soulever
une personne. Il sera utilisé pour de la
rééducation et de la simulation mais aussi pour
permettre un retour haptique. Il pourra être utilisé en
conjonction avec notre motion base
et différents supports comme
un tapis de marche, eux-mêmes pouvant
être instrumentés et actionnés.
this robot is installed in an immersive room in Sophia. It uses 6
linear actuators and may lift a person. It will be used for
rehabiliation and simulation but also as an haptic device. It can be
used in conjunction with our motion base and various supports such as
a walking treadmill, that can be also instrumented and actuated
 (2012-)
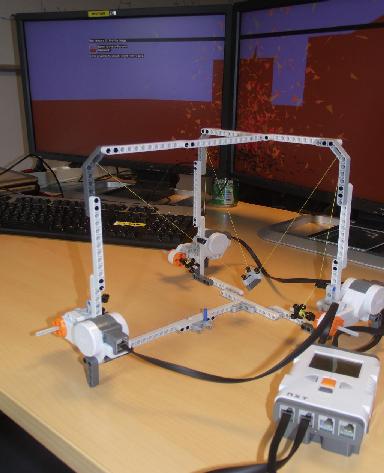
robots parallèles à câbles pédagogiques/
parallel wire-driven pedagogical robots ,
MARIONET-SCHOOL,
: des robots
très peu coûteux, modulaires, facilement transportables
et de géométrie variable (d'un support sur table
à la couverture complète d'une salle de cours), dont le rôle est de permettre
d'illustrer des concepts scientifiques de domaines variés (pas
que de la robotique) auprès de public très divers. Le
but est d'établir des notices pédagogiques pour chaque
domaine. La version présentée sur la photo utilise des moteurs
pas-à-pas mais il en existe une version LEGO et une version
avec des servos. (2012-)
robots parallèles à câbles pédagogiques/
parallel wire-driven pedagogical robots ,
MARIONET-SCHOOL,
: des robots
très peu coûteux, modulaires, facilement transportables
et de géométrie variable (d'un support sur table
à la couverture complète d'une salle de cours), dont le rôle est de permettre
d'illustrer des concepts scientifiques de domaines variés (pas
que de la robotique) auprès de public très divers. Le
but est d'établir des notices pédagogiques pour chaque
domaine. La version présentée sur la photo utilise des moteurs
pas-à-pas mais il en existe une version LEGO et une version
avec des servos.
Pedagogical, low cost, modular robots, that can be easily transported
in a suitcase and may have various geometries (on a table or fully
covering an entire classroom). They are intended to be used to
illustrate scientific concepts from various domains (not only
robotics) to different audiences. The purpose is to establish class
notes for each domain. The presented version uses step motors but it
exists a LEGO version and a version with servos
Ces robot sont très modulaire. On les désigne sous le nom
de N-M s'ils ont N câbles attachés en M points distincts de
la plateforme (et parfois N-M1-M2 pour indiquer que M1, M2 câbles
sont attachés au même point).
Parfois la géométrie impose un mouvement uniquement
dans un plan. Avec la même motorisation on peut placer le robot dans
différentes configurations en déplacant les
supports des winchs. Les différentes configurations
présentées dans les vidéos ont été
obtenues avec le même robot.
These robot are very modular. They are called N-M if it they have
N wires attached
at M distinct points of the platform or sometimes N-M1-M2 to indicate
that M1, M2 wires are attached at the same point. It may happen that
the geometry imposes only planar motion. Just by moving the pedestals
supporting the winches we are able to obtain various
configurations. All the videos presented in this section have been
obtained with the same robot.
Photos: le robot présenté dans
une classe et à la
fête de la Science,
the robot
exhibited in a classroom and during a science festival,
version LEGO,
version SERVO,
une vue rapprochée du
mécanisme d'enroulement: un codeur
permet de compter les tours et un capteur à effet Hall
repère régulièrement un aimant sur le tambour,
a closed-up view of the coiling mechanism: an encoder counts the
motors turns and a Hall sensor detects a small magnet glued on the
drum.
Videos: un des MARIONET-SCHOOL avec des servos/one of the
MARIONET-SCHOOL robot using servos
- en configuration 3-3 plan/planar 3-3 configuration
:
téléopéré
avec des sliders:
3 câbles sont attachés en 3 points distincts mais
alignés sur la
plate-forme, les systèmes d'enroulement étant dans le
même plan vertical, qui permet de commander 3 degrés de
liberté (x,z,orientation),the robot being teleoperated with
sliders: it is in a planar configuration called 3-3 planar (3 wires
attached at 3 different but aligned points on the platform, all drums
being in the
same vertical plane), allowing to control 3
d.o.f. (x,z,orientation). Une vue de
dessous de la translation
horizontale d'un 3-3 plan et la vue de
côté,
translation selon la verticale,
bottom and side view of a horizontal
translation of a 3-3 planar robot and of a vertical one.
- en configuration 2-1/ 2-1 configuration
: on commande seulement x et z, translation selon
l'axe z puis x. A 2-1 allows to
control the 2 dof
x-z
- en configuration 2-2/2-2 configuration
: on commande ici 2 degrés de
liberté (par exemple x,z), le 3ième ne pouvant plus
l'être, a 2-2 configuration
allowing to control only 2 dof (e.g x,z), the third one being
uncontrolable. Translation selon l'axe
x puis selon l'axe z dans le mode x-z,
mouvement selon l'axe z dans le mode
z-teta (l'orientation reste constante),
translation
along the x and z axis in the x-z mode and translation along
the z axis in the z-teta mode (orientation is constant).
Même des servos de faible couple (27.5Ncm) permettent de
soulever une mannequin de
1kg. Even servos with low torque (27.5Ncm) allow one to lift
a 1kg mannequin.
- en configuration 3-2-1/3-2-1 configuration: 2 des
3 câbles sont attachés au même point de la
plate-forme. On commande ici 3 degrés de
liberté (par exemple translation en
x,y,z). Two wires are connected at the same point, allowing
to control 3 dof, e.g. the x,y,z translation
- en configuration 3-1/3-1 configuration: les
3 câbles sont attachés au même point de la
plate-forme. On commande ici uniquement
les translations en
x,y,z). Three wires are connected at the same point, allowing
to control only the x,y,z, translation.
Ainsi en configuration 3-1 nous avons une maquette de
MARIONET-ASSIST qui permet tout comme lui de procéder
à des opérations de transfert ou de
rééducation
pour l'assistance aux
personnes, ici avec un mannequin. In this configuration we get a
model for one operation mode of MARIONET-ASSIST for performing
assistance for transfert operation and rehabilitation, here with a
wooden mannequin.
- en configuration 3-3/3-3 configuration: les
3 câbles sont attachés en des points distincts de la
plate-forme. On commande ici 3 degrés de
liberté (par exemple translation en
x,y,z: les changements d'orientation dans ce mouvement sont le
résultat de l'équilibre mécanique de la plate-forme).
Three wires are connected at distinct points on the platform, allowing
to control 3 dof, e.g. x,y,z, translation (the change of orientation
in this motion is the result of the static equilibrium of the platform)
De nombreux prototypes de robots parallèles ont été développés
dans le projet, nous en présentons ici quelques exemples.
Several parallel robot prototypes have been developed in the
project and we show some of them.
 (1996-2003),
machine-outil parallèle avec la PME CMW,
parallel machine-tool with the SME CMW (1996-2003),
machine-outil parallèle avec la PME CMW,
parallel machine-tool with the SME CMW
Photo:
le robot chez CMW
-
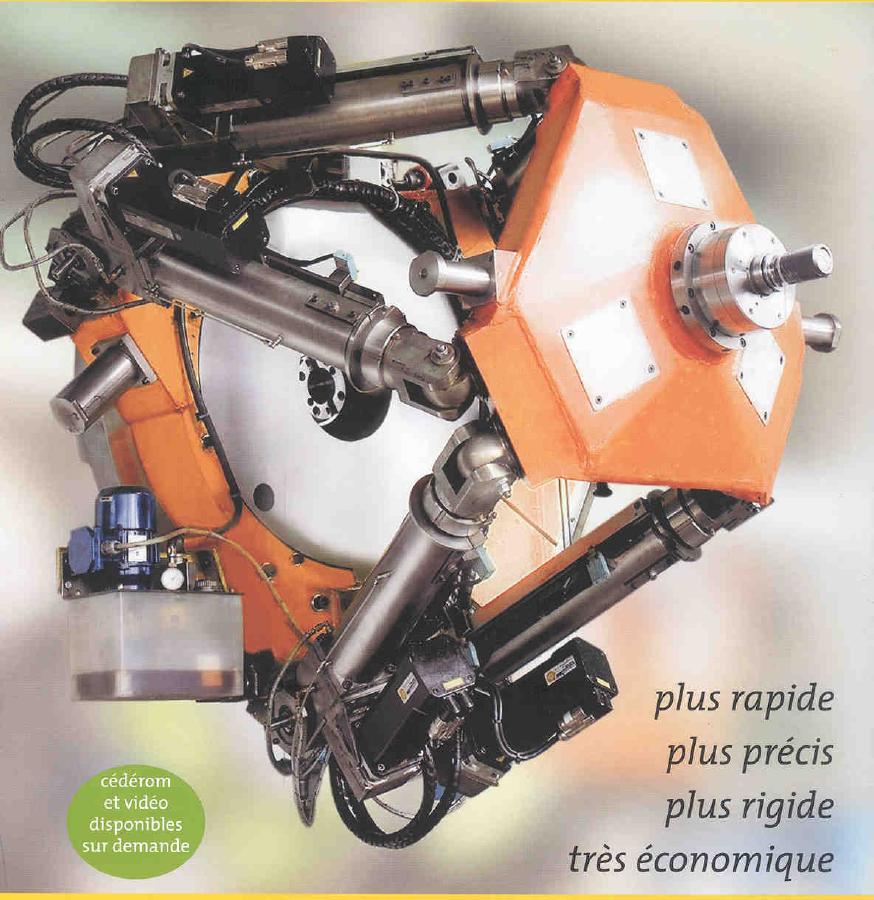
 (1996-2000)
positionneur ultra-précis avec ESRF. Différentes
versions ont été étudiés, la
dernière pouvant porter 2.5 tonnes et déplacer la charge
avec une précision inférieure au micron. Plus de 40
exemplaires sont en utilisation à l'ESRF (1996-2000)
positionneur ultra-précis avec ESRF. Différentes
versions ont été étudiés, la
dernière pouvant porter 2.5 tonnes et déplacer la charge
avec une précision inférieure au micron. Plus de 40
exemplaires sont en utilisation à l'ESRF
fine positioning device with ESRF. Various versions have been
developed, the last allow to manipulate a load of 2.5 tons with an
accuracy better than 1 micron. More than 40 devices are used at ESRF
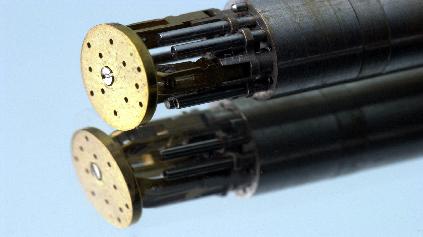
 (1998-2003), micro-robot MIPSpour l'endoscopie chirurgical: trois
degrés de liberté, 7mm de diamètre, 2.5cm de
long. Ce robot a été récompensé par deux
prix (Micron d'Or à Micronora et prix de la Fondation Altran)
(1998-2003), micro-robot MIPSpour l'endoscopie chirurgical: trois
degrés de liberté, 7mm de diamètre, 2.5cm de
long. Ce robot a été récompensé par deux
prix (Micron d'Or à Micronora et prix de la Fondation Altran)
micro robot for surgical endoscopy: 3 dof, 7mm of diameter, length
of 25mm. This robot has been awarded two prices (Micron d'Or à
Micronora and Altran Fundation award)
Photos: vue d'ensemble et
de détail, global and
detailled view
 (2002-)
télescope déployable pour Alcatel, devenu Thalès
Alenia Space. L'idée est
d'utiliser un système de mètre à ruban pour le
déploiement des jambes qui ont une longueur fixe, puis le
principe du "poignet actif", un robot
parallèle breveté dans le projet, pour assurer une
haute précision de positionnement. Nous avons aussi
étudé pour Alcatel des robots de positionnement
d'antenne qui sont utilisés à Cannes et à
Toulouse. (2002-)
télescope déployable pour Alcatel, devenu Thalès
Alenia Space. L'idée est
d'utiliser un système de mètre à ruban pour le
déploiement des jambes qui ont une longueur fixe, puis le
principe du "poignet actif", un robot
parallèle breveté dans le projet, pour assurer une
haute précision de positionnement. Nous avons aussi
étudé pour Alcatel des robots de positionnement
d'antenne qui sont utilisés à Cannes et à
Toulouse.
deployable telescope with Alcatel(now Thalès Alenia
Space). The idea was to use the principle of the measuring tape to
have deployable legs of fixed lengths and then to control the
positioning of the platform by using our patented active wrist
principle. We have also studied for this company antenna positionning
robot that are used in Cannes and Toulouse
Video:
déploiement/deployment(mpeg file)
-
 (2005-2008), concept d'un
robot médical constitué de micro-robots s'assemblant dans
l'abdomen pour effectuer du diagnostic et des opérations
(projet européen ARES) (2005-2008), concept d'un
robot médical constitué de micro-robots s'assemblant dans
l'abdomen pour effectuer du diagnostic et des opérations
(projet européen ARES)
concepts of a medical robot constituded of self-assembling
micro-robots in the abdomen for performing diagnosis and operation
(European ARES project, 2005-2008)
Video:
le concept/the concept
 (2010-)
Motion
base,: nous avons modifié une motion base de Servos, pouvant
transporter 200 kg, qui nous servira pour nos simulations dans
l'espace immersif en conjonction avec le robot
MARIONET-VR (2010-)
Motion
base,: nous avons modifié une motion base de Servos, pouvant
transporter 200 kg, qui nous servira pour nos simulations dans
l'espace immersif en conjonction avec le robot
MARIONET-VR
we have modified a Servos motion base that can transport up to 200
kg and will be used in the immersive room in conjunction with the MARIONET-VR robot.
Videos: une
trajectoire en carré,
a square trajectory, la motion base modifiant l'inclinaison d'un
tapis de marche, the motion
base is used to change the slope of a walking treadmill, la motion
base faisant
vibrer le tapis, the motion
base impulsing vibration on the treadmill
 (2012-)
dispositif à colonnes:
pour compléter notre
motion base nous avons instrumenté deux colonnes de 100 kg de
charge pour pouvoir les contrôller en position. (2012-)
dispositif à colonnes:
pour compléter notre
motion base nous avons instrumenté deux colonnes de 100 kg de
charge pour pouvoir les contrôller en position.
to complement our motion base we have instrumented two lifting
columns (nominal load: 100kg) allowing them to be position controlled
Video:: les colonnes modifiant
la pente du tapis,the two
columns changing the slope of a walking treadmill
Nous avons entamé en 2009 un effort long terme sur
la robotique
d'assistance aux personnes à mobilité
réduite.
La ligne directrice est de rechercher à
développer des systèmes répondant à des besoins
réels, très peu intrusif, à interface
très variés et de co�t faible, ces priorités
ayant émergées après deux ans d'interview. Pour
cela nous utilisons du
matériel standard et nous misons sur la
modularité pour l'adapter finement aux besoins après une
concertation avec de nombreux experts (gérontologue, infirmiers, famille
maison de retraite). Plus d'informations sur ces travaux
sont disponibles dans cette
page.
We have started in 2009 a strategic long term move toward
assistance robotics.
Our guidelines are to develop systems that are really
needed, with a very low intrusivity, low cost
and that can be controled through a set
of very simple interfaces. These guidelines have been established
after a 2 years
period of interviews with elderly people but also caregivers,
helpers, family,
nurses, personnal from retirement houses and specialized doctors. To
decrease the
cost we will use only standard hardware and
will rely on modularity to finely tune it to the application at
hand. More information on this topic may be found here.
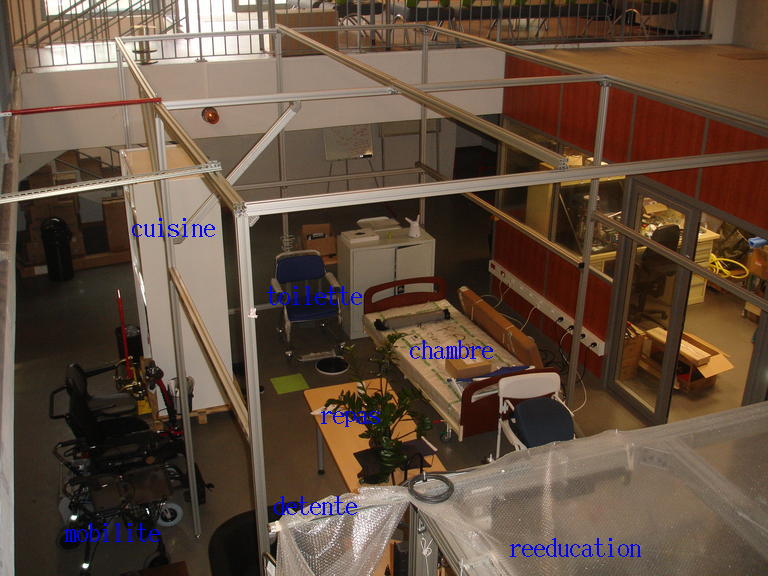 Pour nos expérience nous avons reconstitué un
appartement complet.
Cet appartement
est équipé du robot de transfert MARIONET-ASSIST
permettant d'aider au lever et à la marche et offrant des
possibilités de manipulation d'objets. Nous installons aussi des
objets communicants qui aideront à résoudre des
problèmes de détresse, comme une chute, par exemple avec
notre veste instrumenté.
Pour nos expérience nous avons reconstitué un
appartement complet.
Cet appartement
est équipé du robot de transfert MARIONET-ASSIST
permettant d'aider au lever et à la marche et offrant des
possibilités de manipulation d'objets. Nous installons aussi des
objets communicants qui aideront à résoudre des
problèmes de détresse, comme une chute, par exemple avec
notre veste instrumenté.
For our experiments we have built a full
flat. We have installed
in that flat the wire crane MARIONET-ASSIST
that is used to lift people and to help them
to walk, while offering manipulation possibilities. We have also started
installing smart
objects that will allows one to manage distress situation, such as a
fall, for example with our instrumented vest.
Photo:
photo 1
Nous développons une famille de déambulateur
appelé ANG (Automated Navigation Guide) dont les buts
sont, entre autres,
d'aider à l'analyse de la marche,
prévenir/empêcher les chutes, aide à la
mobilité...
We are
developing a family of walking aids, called ANG (Automated
Navigation Guide) whose purposes, among others, are to monitor walking
patterns, detect/prevent fall, assisting mobility..
-
 (2010-)ANG-light: c'est
un déambulateur passif qui est équipé pour reconstruire la
trajectoire du système (accéléromètre 3D,
codeurs dans les roues arrières, GPS).
Nous l'utilisons,
en collaboration très proche avec le CHU de Nice, pour faire
des évaluations quantifiées
de la qualité de la marche chez les personnes
âgées. (2010-)ANG-light: c'est
un déambulateur passif qui est équipé pour reconstruire la
trajectoire du système (accéléromètre 3D,
codeurs dans les roues arrières, GPS).
Nous l'utilisons,
en collaboration très proche avec le CHU de Nice, pour faire
des évaluations quantifiées
de la qualité de la marche chez les personnes
âgées.
ANG-light is a passive walking aid that is equiped for
trajectography
(3D accelerometer, encoders in the wheels, GPS).
We use it, in
a very close collaboration with the local hospital of Nice, to evaluate the quality of the walking
with elderly people
Photos:
- ANG-light au CHU de
Nice, ANG-light at Nice hospital ,
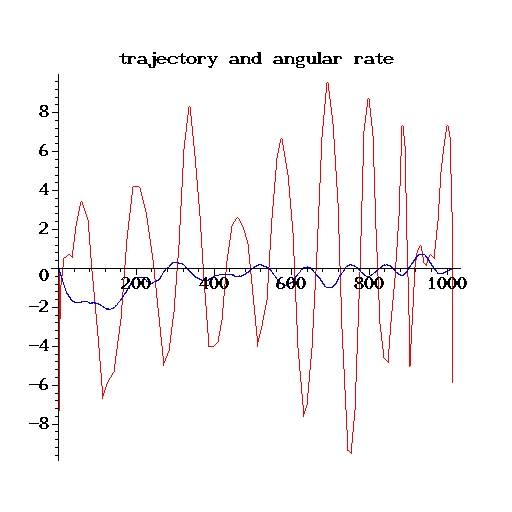
- enregistrement
de trajectoire
et de la vitesse de rotation du déambulateur pour un utilisateur
ayant suivi une trajectoire en ligne
droite (on y voit que l'utilisateur dévie de la ligne droite
de seulement quelques centimètres), the record of the
trajectory and angular rate of the
walking aid when performing a straight line trajectory (it may be
seen that the deviations are only a few centimers),
- Une expérience a impliqué 49 sujets (26 de plus de 65 ans,
23 de moins de 65 ans).
Ce fichier pdf montre le temps
d'éxécution d'un parcours en ligne droite de 10m. Les rectangles
montrent
le nombre d'utilisateurs (abcisse) ayant fait un temps entre n et n+1 secondes
(ordonnées) selon leur ages (rectangle bleu> 65 ans, rouge <65 ans).
Ainsi un sujet de plus de 65 ans a mis entre 6 et 7 secondes alors que
c'était le cas de 0.5 sujet de moins de 65 ans (le nombre de sujet de -
de 65 ans a été normalisé). On voit que curieusement les
sujets de plus de 65 ans vont plus vite que les moins de 65 ans et qu'il n'y a
pas une grosse dispersion dans leur temps (80% des sujets ont un temps entre
8 et 11 secondes): le temps de parcours n'est donc pas un élément
trè discriminant. An exprience has implied 49 subjects, 26 with an
age > 65 years, 23 with an age <65 years. This
graph shows the walking time (ordonnee) and the
number of subjects (abscissa) for a straight line trajectory of 10m.
The width of a rectangle gives the number of
subjects whose time was between n and n+1 seconds. The blue rectangle are
for subjects of age larger than 65 years, the red one for those having less
than 65 years. It may be seen that curiously older people perform the
trajectory in less time than the younger subjects while their time dispersion
is low. Hence walking time is not really discriminant
Par contre si l'on regarde les écarts de trajectoire
(distance à la droite idéle) on voit
sur ce graphe qu'il est plus
élevé pour les sujets de plus de 65 ans, avec une forte
dispersion: cet écart est donc un bon indicateur de la marche
On the other hand if we look at the
graph of the deviation between the
flollowed trajectory and the straight line it may be seen that it is
much higher for subjects having an age larger than 65 years with a high
dispersion: hence this deviation is a good index
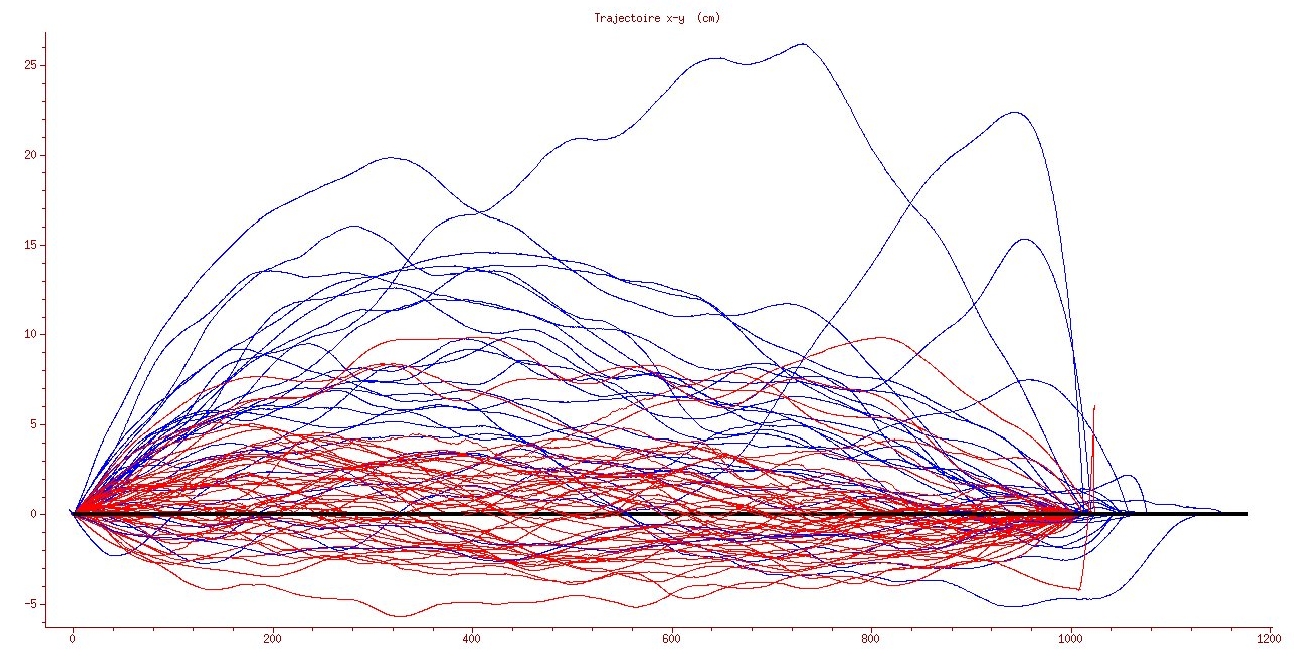
Cette figure, montre une
trajectoire de consigne de 1000cm (la ligne noire) et en rouge les trajectoires
suivies par des sujets de moins de 40 ans et en bleu celle suivies par
des sujets de plus de 65 ans. This
plot shows a reference trajectory
of 1000 cm (the black line) and the trajectories followed by people of age
lower than 40 years (in red) and by peopled older than 65 years (in blue)
- le
déambulateur peut aussi cartographier automatiquement les
lieux qu'il parcoure en mesurant les pentes, détecter les
bateaux de trottoir, noter leur qualité, mesurer la
qualité de la surface d'un trottoir, le tout pouvant
être intégré à une carte
collaborative. C'est ainsi que nous avons cartographié le
site de l'INRIA-Sophia (les pentes
sont indiquées en couleur, les bateaux de trottoir sont
repérés par des K), the walking aid can measure the
slope, surface quality of the sidewalk and detect automatically
lowered kerbs. This has allowed to produce automatically this map of
INRIA Sophia.
Video: cette video
montre différentes expériences de marche avec et sans le
déambulateur et le sujet instrumenté ou non. 24 sujets
ont testé le système à l'INRIA et 30 sujets l'ont
testés entre Septembre 2012 et Février 2013
24 subjects have tested our
walking analysis at INRIA and 30 elderly subjects have tested it between
September 2012 and February 2013
-
 (2010-)ANG-II
est un déambulateur motorisé
équipé de multiples capteurs (codeurs, mesure
de distance, accélérométres, GPS, vision,
force).
Comme ANG-light il peut
être utilisé sans moteur pour
mesurer des caractéristiques
de la marche dans un but de détection préventive de
problèmes articulaires ou avec la motorisation pour aider
à la marche.
Il peut aussi détecter/prévenir la chute et communiquer une
alerte à d'autres dispositifs.
Il peut etre utilisé comme un déambulateur classique
(poussé à la main), avec une aide ponctuelle des moteurs mais
peut aussi �tre téléopéré avec diverses
interfaces (radio-commande, wifi,
télécommande de tv,...). Il dispose aussi d'une panneau
solaire permettant de disposer d'une source d'énergie
autonome. (2010-)ANG-II
est un déambulateur motorisé
équipé de multiples capteurs (codeurs, mesure
de distance, accélérométres, GPS, vision,
force).
Comme ANG-light il peut
être utilisé sans moteur pour
mesurer des caractéristiques
de la marche dans un but de détection préventive de
problèmes articulaires ou avec la motorisation pour aider
à la marche.
Il peut aussi détecter/prévenir la chute et communiquer une
alerte à d'autres dispositifs.
Il peut etre utilisé comme un déambulateur classique
(poussé à la main), avec une aide ponctuelle des moteurs mais
peut aussi �tre téléopéré avec diverses
interfaces (radio-commande, wifi,
télécommande de tv,...). Il dispose aussi d'une panneau
solaire permettant de disposer d'une source d'énergie
autonome.
We have developed a motorized walking aid that is instrumented
with multiple sensors (encoder, accelerometer, GPS,vision,force).
As ANG-light it can be used without motors
to characterize gait patterns
for an early detection of human joint problems, or with motors to help
walking,
It can detect/prevent
falls and communicate warnings to other systems.
It can be be used as a classical walking aid (being
pushed by the user) or teleoperated with various interfaces (RC control, wifi,
tv infrared remote set,..). It has also a solar panel to provide an
alternate source of energy.
Photos: ANG-II peut aussi être utilisé comme une
chaise roulante temporaire, the
walking aid may also be used as a temporary wheelchair. Comment
assurer que le déambulateur suive automatiquement une personne
sans risquer que son lien avec celui-ci ne soit pas interrompu ? nous
apportons une solution originale
à ce problème en utilisant une laisse de chien! how
to ensure that the walking aid will follow the end-user ? we propose a
simple solution by using a dog leash mounted on a passive 2 dof robot
in front of the aid
Videos: ANG-II comme
aspirateur,
récupérant des objets
tombés au
sol, déplacant des
meubles.
Cette
video montre comment le
déambulateur peut automatiquement
revenir apporter un support après une chute, en détectant
la position de la personne tombée.
On peut le téléopérer avec une interface
ne nécessitant
pas l'usage des doigts.
ANG-II as a vacuum cleaner,
retrieving fallen objects
fallen objects,
moving piece of furniture.
This
video shows how the walking aid
may autonomously move to provide a support after a fall, automatically detecting
the position of the fallen subject.
It can be teleoperated with an interface
that does not require to move fingers.
 (2012-)Veste
instrumentée/Instrumented vest:
cette veste inclut un ordinateur lavable Lilypad, un
accéléromètre 3D et 3 capteurs de
verticalité. Elle peut communiquer avec d'autres ordinateurs
par ZigBee ou transmission infra-rouge. Le but est de pouvoir
détecter une chute et, si nécessaire, assurer certaines
mesures physiologiques, tout ceci avec un matériel très faible
coût, donc pouvant être incorporé dans tous les vêtements. (2012-)Veste
instrumentée/Instrumented vest:
cette veste inclut un ordinateur lavable Lilypad, un
accéléromètre 3D et 3 capteurs de
verticalité. Elle peut communiquer avec d'autres ordinateurs
par ZigBee ou transmission infra-rouge. Le but est de pouvoir
détecter une chute et, si nécessaire, assurer certaines
mesures physiologiques, tout ceci avec un matériel très faible
coût, donc pouvant être incorporé dans tous les vêtements.
this vest includes a washable computer Lilypad, a 3D
accelerometer and 3 verticality sensors. It can communicate with
otehr computers through ZigBee or infra-red. The aim is to be able
to detect fall and, if necessary, to measure physiological
parameters with a low cost hardware that can be incorporated
in all clothes.
-
 (2012-)domotique
dans le cadre du projet Dem@care nous avons développé un
système de monitoring de l'activité humaine au
coût très faible, qui vient
compléter le suivi par vision. Notre système permet
ainsi de détecter la prise d'objets ou la mise en marche
d'appareil électrique, de localiser une personne
dans une pièce,... en pouvant gérer une centaine
d'événements. (2012-)domotique
dans le cadre du projet Dem@care nous avons développé un
système de monitoring de l'activité humaine au
coût très faible, qui vient
compléter le suivi par vision. Notre système permet
ainsi de détecter la prise d'objets ou la mise en marche
d'appareil électrique, de localiser une personne
dans une pièce,... en pouvant gérer une centaine
d'événements.
We have installed for the Dem@care project a low cost monitoring
system that allows to detect events such picking a pen, localizing a
person, detecting that a kettle is set on,...It uses only 1D logical
and analog sensors and is able to manage roughly 100 different types
of events. This system is used to complement the information obtained
through a vision system .
- nous disposons de plus d'une flottille de petits robots soit mobiles
(Rovio, Wanny, Pobot, Roomba) soit ludiques (Nabaztag, Tux Droid) que
nous détournons progressivement de leur utilisation première
pour en faire des systèmes d'assistance.
we have also a flotilla of small robots either mobile
(Rovio, Wanny, Pobot, Roomba) or toys (Nabaztag, Tux Droid), that we slowly
modify to turn them on as assistance devices
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}