![]() English version
English version
Simulation de
robot pour la chirurgie hypophysaire
Action
COLOR
Equipe
ChIR
Service de Neurochirurgie du C.H.U.
de Nice
Contexte médical et scientifique
Résultats: stages de Julie Lechtner
Objectif
L'objectif de cette action est de permettre la
collaboration entre l'équipe ChIR et le Service de Neurochirurgie du Centre
Hospitalier Universitaire de Nice pour l'élaboration d'un simulateur de chirurgie
hypophysaire robotisée.
Contexte médical et scientifique
La neurochirurgie nécessite souvent l'abord de lésions
situées dans des zones cérébrales profondes et hautement fonctionnelles. Elle exige
une précision extrême sous peine de provoquer des troubles neurologiques
majeurs voire d'engager le pronostic vital.
Le développement des techniques de chirurgie guidée
par l'image (neuronavigation) permet déjà de sécuriser le geste opératoire en
donnant la possibilité au chirurgien de se repérer en temps réel sur l'imagerie
pré-opératoire.
Les systèmes de robotique chirurgicale peuvent
aujourd'hui permettre d'accroître encore la précision et la sécurité lors
d'interventions de neurochirurgie.
L'équipe ChIR et le Service de Neurochirurgie du
C.H.U. de Nice ont donc décidé d'initier dès septembre 2000 un projet de
recherche de robotique appliquée à la neurochirurgie. La chirurgie hypophysaire
a été retenue comme modèle applicatif du fait des difficultés propres à la voie
d'abord trans sphénoïdale : profonde et exiguë, mauvaise visibilité que ce
soit sous microscope ou par endoscopie, complexité des rapports anatomiques.
Les diverses techniques dérivées de cette voie d'abord se heurtent d'ailleurs toutes
à ces mêmes écueils (l'analyse complète de la pratique chirurgicale actuelle
est disponible dans [1] ).
Face aux carences des techniques actuelles, nous nous
sommes posés la question de l'apport potentiel d'un système robotique en
chirurgie hypophysaire [1]. Nous
avons retenu trois critères fondamentaux qui semblent pouvoir trouver une
solution dans un système robotisé :
![]() Améliorer la vision grâce aux
systèmes de réalité augmentée qui permettent la projection sur le champ
opératoire de reconstructions des structures anatomiques tirées de l'imagerie
pré-opératoire.
Améliorer la vision grâce aux
systèmes de réalité augmentée qui permettent la projection sur le champ
opératoire de reconstructions des structures anatomiques tirées de l'imagerie
pré-opératoire.
![]() Augmenter la précision par
démultiplication du mouvement des bras robotisés et filtrage du tremblement.
Augmenter la précision par
démultiplication du mouvement des bras robotisés et filtrage du tremblement.
![]() Sécuriser le geste par le biais de
commandes à contraintes de force évitant tout mouvement des instruments en
dehors de zones prédéfinies.
Sécuriser le geste par le biais de
commandes à contraintes de force évitant tout mouvement des instruments en
dehors de zones prédéfinies.
Pour étudier ces différents points nous avons donc
commencé à travailler à l'élaboration d'un simulateur de chirurgie hypophysaire
robotisée dans le cadre du stage de DEA Image et Vision (Université de Nice
Sophia Antipolis) de Stéphane Litrico, interne de neurochirurgie au CHU.
Au terme de ce stage, nous avons repéré les points
faibles des différentes techniques de chirurgie actuellement utilisées. Nous
avons mené une revue des procédés robotiques actuellement proposées dans le
domaine médical. En comparant ces données, nous avons établi une liste de
solutions " idéales " :
![]() assistance robotique par robot
télémanipulé,
assistance robotique par robot
télémanipulé,
![]() choix du principe d'un robot en
deux parties : endoscope et porte endoscope,
choix du principe d'un robot en
deux parties : endoscope et porte endoscope,
![]() amélioration de la vision
endoscopique par réalité augmentée,
amélioration de la vision
endoscopique par réalité augmentée,
![]() sécurisation du geste par
contrainte de force, (cette partie a été abordée dans le cadre du stage de
Paulina Marquez [2])
sécurisation du geste par
contrainte de force, (cette partie a été abordée dans le cadre du stage de
Paulina Marquez [2])
![]() augmentation de la précision par
démultiplication et filtrage du mouvement
augmentation de la précision par
démultiplication et filtrage du mouvement
Pour tester et faire évoluer ces concepts, nous avons
choisi de prototyper ces solutions idéales a l'aide d'un outil de simulation [3] nous permettant de proposer et de valider nos choix
de façon itérative. A partir des compétences disponibles dans l'équipe CHIR
autour de la définition de problèmes robotiques, du système STARS (Simulation and
Training Architecture for Robotic Surgery) développé dans l'équipe et de
l'intégration de données d'imagerie, de robotique et de vision par ordinateur,
le stage de Stéphane Litrico a permis de construire le modèle d'un patient
à partir des données IRM et CT-Scan d'un patient (opéré en parallèle de manière
traditionnelle au C.H.U. de Nice) puis de recréer dans le simulateur l'ambiance
chirurgicale et un premier modèle de robot. Il s'agit d'un premier pas vers la
formalisation d'une procédure robotisée [1].
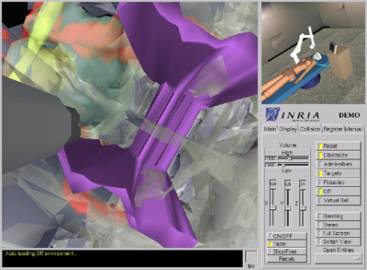
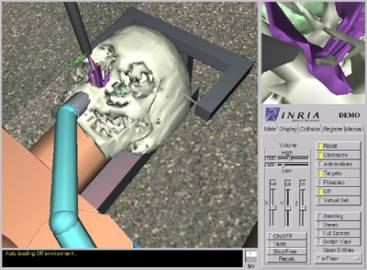
Figure 1: Interface
STARS utilisée pour la chirurgie hypophysaire. A gauche : vue endoscopique
des structures cérébrales, et vue externe du robot Pecker localisé au bloc – A
droite : positionnement du patient avec têtière de fixation et
respirateur.
A partir de ce stage, il apparaît aujourd'hui que la
simulation poursuit un double but : d'une part prototyper et tester nos
solutions robotiques ; d'autre part fournir au chirurgien un outil de formation
et d'entraînement (comme l'illustre la figure 2 en fournissant une observation
inhabituelle pour le chirurgien de la relation géométrique entre l'instrument
chirurgical et l'hypophyse en vue " occipitale "). Ces buts
ne se limitent d'ailleurs pas à la chirurgie hypophysaire mais ces observations
sont évidemment adaptables à d'autres procédures chirurgicales.
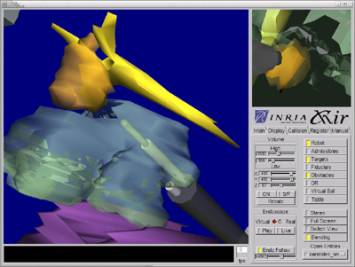
Figure 2 :
observation inhabituelle de l'hypophyse et de l'endoscope robotisé en voie
d'abord trans sphénoïdale (vue " occipitale ").
Nos premiers résultats nous incitent donc à poursuivre
ce travail puisqu'il apparaît clairement que la chirurgie hypophysaire peut
bénéficier de nombreux avantages apportés par les techniques de robotique
médicale. Si les bases de réflexion sont aujourd'hui posées, de nombreux points
doivent encore êtres développés avant d'arriver à un modèle complet de
simulateur chirurgical.
Description des travaux
Dans les suites des travaux déjà réalisés, nous souhaitons
axer nos recherches dans trois directions :
![]() Améliorer la chaîne d'acquisition,
de traitement et de transcription des données d'imagerie qui sont à
la base de nos reconstructions anatomiques. L'objectif est de faciliter et
réduire le temps de travail préopératoire de segmentation et de modélisation
que devra faire le chirurgien avant les opérations. Il est pour cela nécessaire
d'intégrer les méthodes de segmentation et de reconstruction récentes et
adaptées au cerveau. Celles ci pourront être disponibles dans d'autres équipes
de l'INRIA Sophia (Epidaure, Odyssée) ou d'ailleurs.
Améliorer la chaîne d'acquisition,
de traitement et de transcription des données d'imagerie qui sont à
la base de nos reconstructions anatomiques. L'objectif est de faciliter et
réduire le temps de travail préopératoire de segmentation et de modélisation
que devra faire le chirurgien avant les opérations. Il est pour cela nécessaire
d'intégrer les méthodes de segmentation et de reconstruction récentes et
adaptées au cerveau. Celles ci pourront être disponibles dans d'autres équipes
de l'INRIA Sophia (Epidaure, Odyssée) ou d'ailleurs.
![]() Enrichir le modèle géométrique du
robot. Le système robotique Pecker est constitué d'un bras porteur
de type PUMA et d'un endoscope actif qui constitue la partie originale du
système. C'est l'endoscope actif qui permet de pratiquer l'intervention
robotisée. Son modèle doit être approfondi et affiné en le confrontant aux
situations chirurgicales nominales mais également aux cas d'exceptions et aux
situations d'erreur. Il est pour cela nécessaire de continuer à formaliser les
protocoles opératoires en une succession d'actions logiques se définissant en
terme de déplacements, de repères visuels et d'interactions avec
l'environnement. La modélisation des instruments chirurgicaux doit se
poursuivre pour arriver à un modèle capable de s'adapter aux diverses
situations chirurgicales.
Enrichir le modèle géométrique du
robot. Le système robotique Pecker est constitué d'un bras porteur
de type PUMA et d'un endoscope actif qui constitue la partie originale du
système. C'est l'endoscope actif qui permet de pratiquer l'intervention
robotisée. Son modèle doit être approfondi et affiné en le confrontant aux
situations chirurgicales nominales mais également aux cas d'exceptions et aux
situations d'erreur. Il est pour cela nécessaire de continuer à formaliser les
protocoles opératoires en une succession d'actions logiques se définissant en
terme de déplacements, de repères visuels et d'interactions avec
l'environnement. La modélisation des instruments chirurgicaux doit se
poursuivre pour arriver à un modèle capable de s'adapter aux diverses
situations chirurgicales.
![]() Améliorer le rendu visuel et
haptique du simulateur. Le simulateur de procédures robotisées STARS [3,4] développé par CHIR dans le cadre de la chirurgie
robotisée est adaptable à tout type de chirurgie et de robot. Il permet
l'interaction entre un système robotique et des reconstructions anatomiques.
Dans le cadre du projet PECKER, nous le couplons à une interface haptique
PHANTOM® afin d'étendre les premiers résultats obtenus lors du stage de Paulina
Marquez [2]. Les aspects de contrainte
haptique permettent de guider le geste du chirurgien vers des zones prédéfinies
et le retour de force permet la simulation tactile proprement dite. Ces thèmes
de recherche sont d'ailleurs communs avec d'autres projets auxquels collabore
CHIR, notamment Endoxirob et VTHD++. Les éléments d'ambiance visuels du
simulateur permettent un meilleur réalisme. Ils doivent également être définis
et modélisés.
Améliorer le rendu visuel et
haptique du simulateur. Le simulateur de procédures robotisées STARS [3,4] développé par CHIR dans le cadre de la chirurgie
robotisée est adaptable à tout type de chirurgie et de robot. Il permet
l'interaction entre un système robotique et des reconstructions anatomiques.
Dans le cadre du projet PECKER, nous le couplons à une interface haptique
PHANTOM® afin d'étendre les premiers résultats obtenus lors du stage de Paulina
Marquez [2]. Les aspects de contrainte
haptique permettent de guider le geste du chirurgien vers des zones prédéfinies
et le retour de force permet la simulation tactile proprement dite. Ces thèmes
de recherche sont d'ailleurs communs avec d'autres projets auxquels collabore
CHIR, notamment Endoxirob et VTHD++. Les éléments d'ambiance visuels du
simulateur permettent un meilleur réalisme. Ils doivent également être définis
et modélisés.
Modalités de la collaboration
La collaboration entre chirurgiens et informaticiens
est désormais formalisée dans le cadre d’un projet COLOR (Collaborations
Locales de Recherche) établi entre l’équipe ChIR et le service de
Neurochirurgie du C.H.U. de Nice.
Stéphane LITRICO
et Eric NIESAR, internes dans le service de
Neurochirurgie du Pr PAQUIS assurent l’interface entre les deux équipes.Ils
pourront notamment participer au prototypage du système en utilisant le
logiciel STARS à l'hôpital et en réalisant a chaque intervention des
comptes-rendus détaillés des interventions chirurgicales effectuées. L'objectif
de cette dernière phase est de dresser une liste la plus réaliste possible des
temps opératoires afin de faciliter la formalisation correspondante des
procédures chirurgicales dans le simulateur. Il est évident que cette
formalisation ne se limitera pas au cas de la chirurgie hypophysaire mais
participera à une réflexion plus globale menée dans l'équipe ChIR.
Eve
COSTE-MANIERE et Louaï ADHAMI
seront les principaux acteurs de l'équipe ChIR pour ce projet. Ils devront être
rejoints par un stagiaire supplémentaire qui réalisera les développements
spécifiques de l'application de résection de l'hypophyse avec assistance
robotisée.
Ressources
Le simulateur STARS est en cours de développement dans
l'équipe ChIR principalement autour d'application de chirurgie cardiaque.
Les ressources spécifiques au projet Pecker permettent
notamment de financer un stage de DEA d'environ 6 mois afin de permettre les
développements spécifiques à la chirurgie hypophysaire. Celui-ci se déroulera
principalement à l'INRIA Sophia Antipolis, avec des visites régulières au bloc
opératoire et au CHU pour appréhender au mieux la réalité chirurgicale à
modéliser, planifier puis par la suite la simuler afin de coupler les deux
cultures chirurgicale et informatique.
Références
[2] Paulina Marquez-santoyo, " Haptic
Simulation of a Robotic System in Pituitary Surgery ", Mémoire de fin
d'études a l'Universidad Autonoma de Queretero, Mexico, Septembre 2001.
[3] Louaï Adhami, Eve
Coste-Manière, Jean-Daniel Boissonnat, " Planning and Simulation of
Minimally Invasive Surgery using Tele-Operated Manipulators ",
workshop on Medical Robotics, 10th International Conference on
Advanced Robotics, August 2001.
[4] Eve Coste-Manière, Louaï Adhami, Renaud
Severac-Bastide, Jean-Daniel Boissonnat, Alain Carpentier,
" Planification et simulation de chirurgie mini-invasive
robotisée ", Comptes Rendus de l'Académie des Sciences, 2001.